



下载这个控制软件,有一种年老失修的美

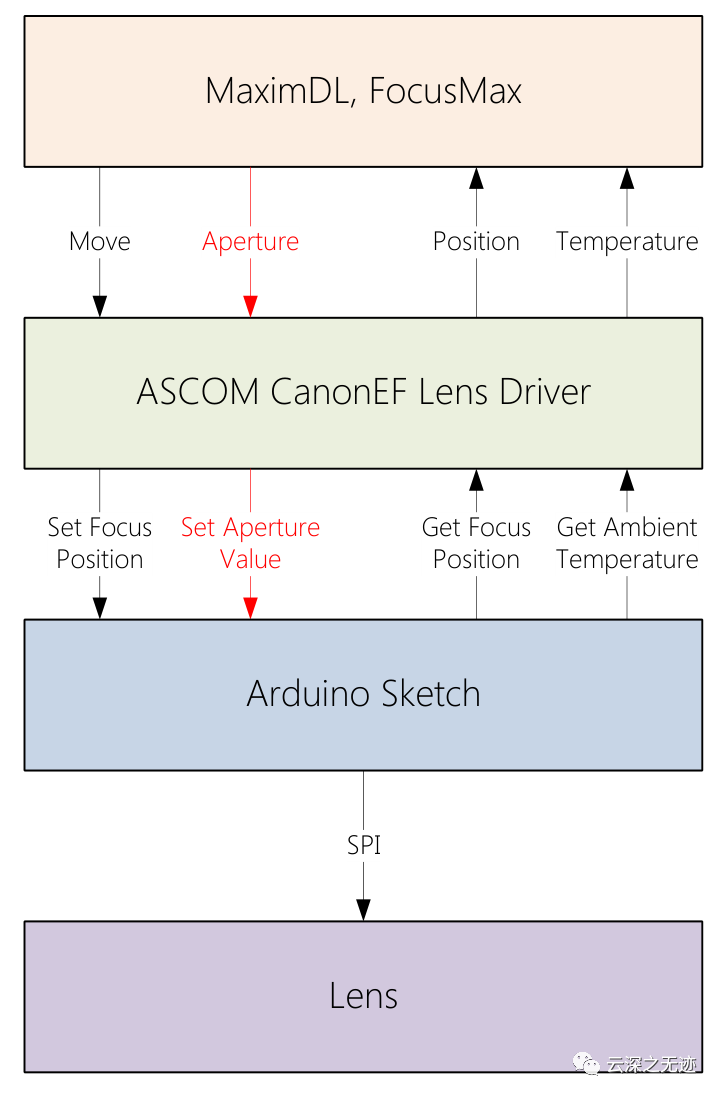
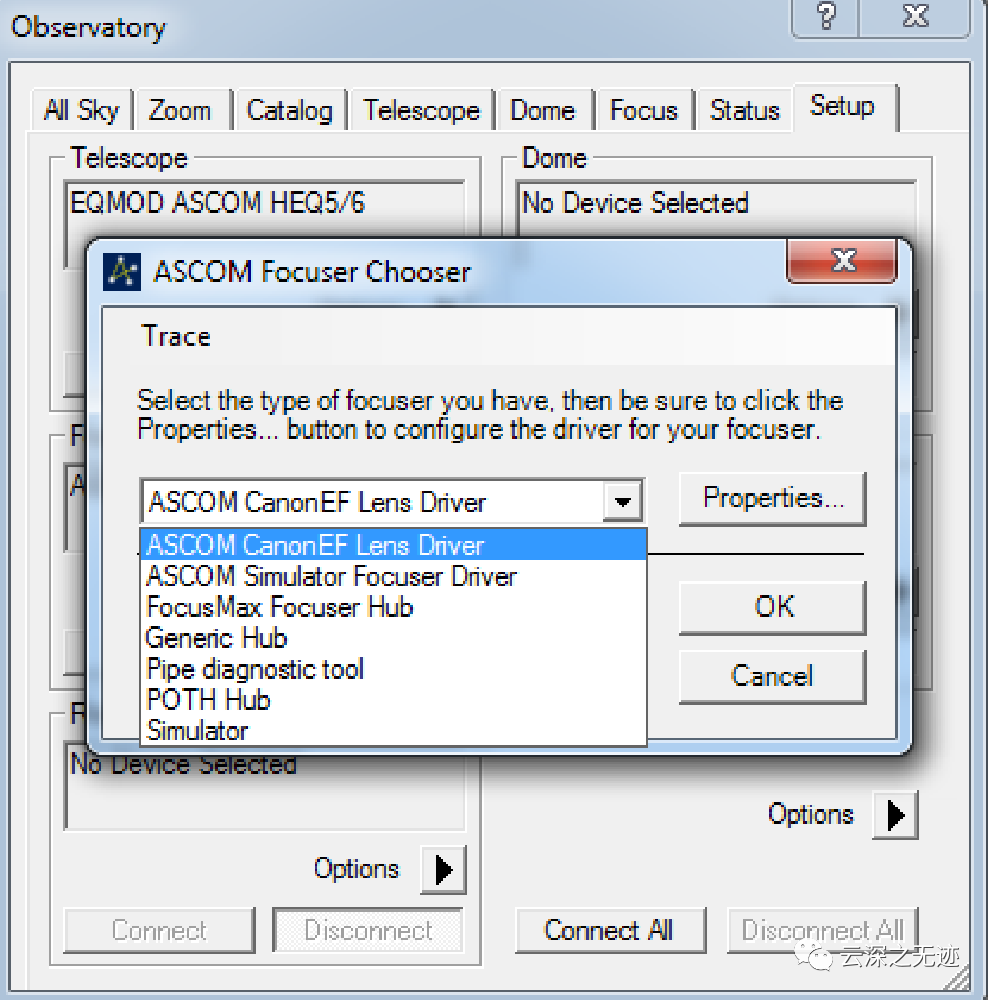
ASCOM
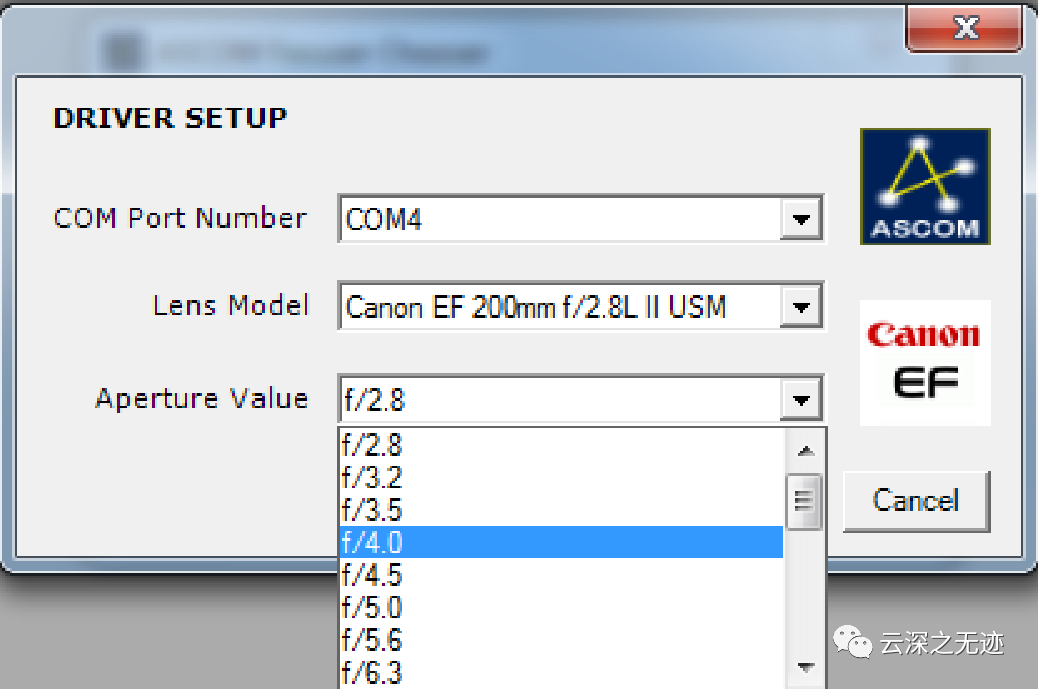
Click «Properties», you can see driver setup dialog. Set requiredparameters:
COM Port Number – controller connection port;
Lens Model – choose your lens from drop-down list. In fact youcan use any lens. Just add it to lens.txt which is in driverinstallation folder and insert all aperture values of lens;
Aperture Value – select required aperture value. Changes will besaved in EEPROM of Arduino chip.
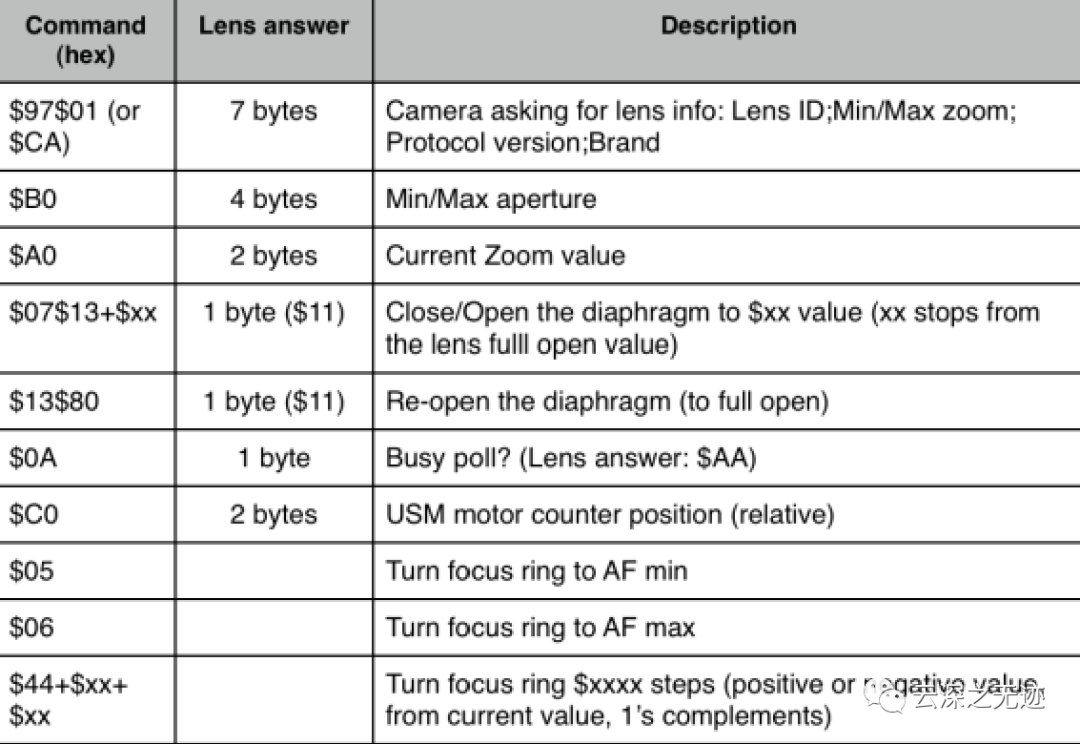
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);volatile byte pos;volatile int enc_count;boolean sw = false;boolean real_mode = false;int mode = 0;int mode_counter[2];int focuserPosition, apValue, offset, apAddr, fpAddr, fpValue, x, y;boolean IsFirstConnect;void InitLens(){SPI.transfer(0x0A);delay(30);SPI.transfer(0x00);delay(30);SPI.transfer(0x0A);delay(30);SPI.transfer(0x00);delay(30);}int ENC_COUNT(int incoming){static int enc_old = enc_count;int val_change = enc_count - enc_old;if (val_change != 0){incoming += val_change;enc_old = enc_count;}return incoming;}void ENC_READ(){byte cur = (!digitalRead(ENC_B) << 1) + !digitalRead(ENC_A);byte old = pos & B00000011;byte dir = (pos & B00110000) >> 4;if (cur == 3)cur = 2;else if (cur == 2)cur = 3;if (cur != old){if (dir == 0){if (cur == 1 || cur == 3)dir = cur;}else{if (cur == 0){if (dir == 1 && old == 3)enc_count++;else if (dir == 3 && old == 1)enc_count--;dir = 0;}}pos = (dir << 4) + (old << 2) + cur;}}void setup(){digitalWrite(13, LOW); // SPI Clock PINpinMode(ENC_A, INPUT_PULLUP);pinMode(ENC_B, INPUT_PULLUP);pinMode(LED_Red, OUTPUT);pinMode(LED_Green, OUTPUT);pinMode(LED_SW, INPUT_PULLUP);pinMode(CS, OUTPUT);pinMode(F1, INPUT_PULLUP);attachInterrupt(0, ENC_READ, CHANGE);attachInterrupt(1, ENC_READ, CHANGE);display.begin(SSD1306_SWITCHCAPVCC, 0x3C);display.clearDisplay();// Font sizedisplay.setTextSize(3);// Font colordisplay.setTextColor(WHITE);display.setCursor(0, 10);display.println("EF-LensFocuser");display.display();delay(1000);mode = 0; // focus control modeapAddr = 0; // 1 byte memory for aperture valuefpAddr = 1; // 2 byte memory for focus positionfocuserPosition = 5000;SPI.begin();SPI.setBitOrder(MSBFIRST);SPI.setClockDivider(SPI_CLOCK_DIV128);SPI.setDataMode(SPI_MODE3);digitalWrite(12, HIGH);digitalWrite(LED_Red, HIGH);digitalWrite(LED_Green, LOW);InitLens();SPI.transfer(0x05); // Focus Maxdelay(1000);apValue = EEPROM.read(apAddr);fpValue = EEPROM.read(fpAddr) * 256 + EEPROM.read(fpAddr + 1); // focus positionoffset = fpValue - focuserPosition;proc_lens(offset); // Move focus tot last positionSerial.begin(9600);Serial.print("FP:");Serial.println(fpValue);Serial.print("AP:");Serial.println(apValue);display.clearDisplay();display.setCursor(0, 10);display.print("F:");display.println(fpValue);display.print("A:");display.println(apValue);display.display();delay(1000);}void loop(){int sw_count;int tmp, last_offset;short counter_now;digitalWrite(CS, HIGH);sw_count = 0;while (digitalRead(LED_SW) == LOW){sw_count++;if (sw_count > 50){if (mode == 1){ // forcus control modedigitalWrite(LED_Red, HIGH);digitalWrite(LED_Green, LOW);}else{ // aperture control modedigitalWrite(LED_Green, HIGH);digitalWrite(LED_Red, LOW);}}if (sw_count > 200){digitalWrite(LED_Green, HIGH);digitalWrite(LED_Red, HIGH);}delay(10);}delay(100);if (sw_count > 50 && sw_count < 200){mode == 0 ? mode = 1 : mode = 0;}if (mode == 1){digitalWrite(LED_Green, HIGH);digitalWrite(LED_Red, LOW);}else{digitalWrite(LED_Red, HIGH);digitalWrite(LED_Green, LOW);}/*if (sw_count != 0) {Serial.print("mode: ");Serial.print(mode);Serial.print(", real: ");Serial.println(real_mode);}*/if (sw_count > 200){real_mode = !real_mode;if (real_mode){Serial.print("mode: ");Serial.println(mode);last_offset = mode_counter[mode];}else{mode_counter[mode] = last_offset;}}if (sw_count != 0 && (sw_count < 50)){proc_lens(tmp);}counter_now = ENC_COUNT(mode_counter[mode]);tmp = counter_now - mode_counter[mode]; // encoder counter stateif (mode_counter[mode] != counter_now){tmp > 0 ? 1 : -1;if (real_mode){mode_counter[mode] += tmp;proc_lens(tmp);}else{mode_counter[mode] = counter_now;}}if (sw_count != 0 || tmp != 0)disp_update(tmp, last_offset);}void proc_lens(int tmp){int ap;digitalWrite(CS, LOW);if (mode == 0){ // Send command to LENS フォーカスif (real_mode){offset = tmp;}else{offset = mode_counter[mode];}x = highByte(focuserPosition);y = lowByte(focuserPosition);EEPROM.write(fpAddr, x); // write to EEPROM last focus positionEEPROM.write(fpAddr + 1, y);x = highByte(offset);y = lowByte(offset);Serial.print("FP:");Serial.print(offset);Serial.print(", ");Serial.println(focuserPosition);InitLens();SPI.transfer(0x44);delay(30);SPI.transfer(x);delay(30);SPI.transfer(y);delay(30);SPI.transfer(0);delay(100);focuserPosition += offset;}else{ // 絞りapValue = mode_counter[mode];ap = (apValue - EEPROM.read(apAddr)) * 3;Serial.print("APvalue:");Serial.print(apValue);Serial.print(",SET ap:");Serial.println(ap);if (apValue != EEPROM.read(apAddr)){InitLens();SPI.transfer(0x07);delay(10);SPI.transfer(0x13);delay(10);SPI.transfer((apValue - EEPROM.read(apAddr)) * 3);delay(100);SPI.transfer(0x08);delay(10);SPI.transfer(0x00);delay(10);EEPROM.write(apAddr, apValue);}}}void disp_update(int tmp, int last_offset){char sep;display.clearDisplay();display.setCursor(0, 10);if (real_mode){ // Update when encoder rotatedsep = '>';switch (mode){case 0:(tmp > 0) ? sep = '>' : sep = '<';display.print("F");display.print(sep);display.println(last_offset);display.print("P");display.print(sep);display.println(focuserPosition);break;case 1:display.print("F");display.print(sep);display.println(focuserPosition);display.print("A");display.print(sep);display.println(mode_counter[mode]);break;}}else{ // Update when switch pushedsep = ':';switch (mode){case 0:display.print("F");display.print(sep);display.println(mode_counter[mode]);display.print("P");display.print(sep);display.println(focuserPosition);break;case 1:display.print("F");display.print(sep);display.println(focuserPosition);display.print("A");display.print(sep);display.println(mode_counter[mode]);break;}}display.display();}
https://astromechanics.org/downloads/ascom_ef/en/manual/User%20Manual%20ASCOM.pdfhttps://github.com/crescentvenus/EF-Lens-CONTROL/blob/master/EF-Lens-control.inohttps://ascom-standards.org/Downloads/FocuserDrivers.htm
