
内部时钟
外部时钟
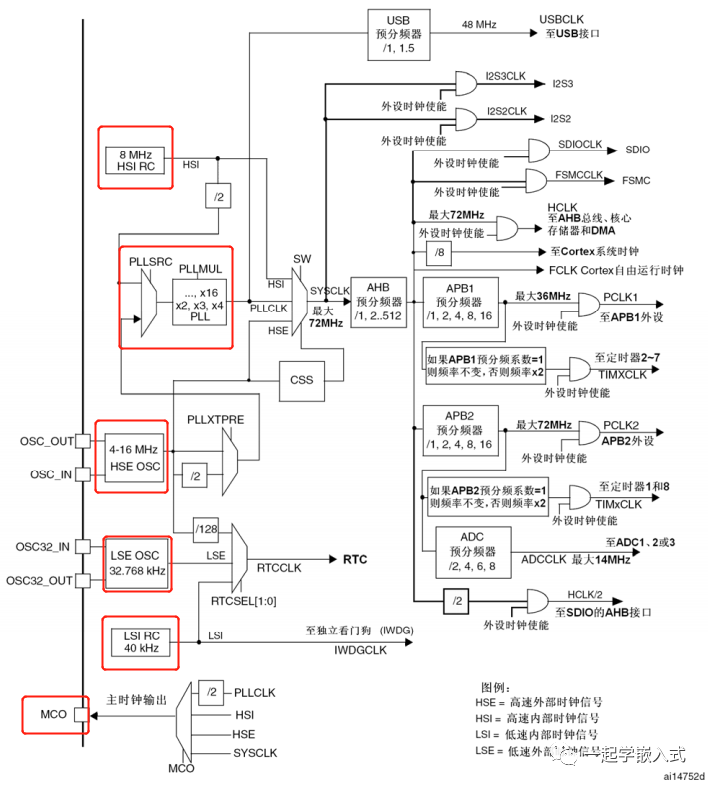
HSI(内部高速时钟)
它是RC振荡器,频率可以达到8MHZ,可作为系统时钟和PLL锁相环的输入
HSE(外部高速时钟)
接入晶振范围是4-16MHZ,可作为系统时钟和PLL锁相环的输入,还可以经过128分频之后输入给RTC。
LSI(内部低速时钟)
它是RC振荡器,频率大概为40KHZ,供给独立看门狗或者RTC,并且独立看门口只能依靠LSI作为时钟源
LSE(外部低速时钟)
通常外接32.768MHZ晶振提供给RTC
PLL(锁相环)
用来倍频输出。因为开发板外部晶振只有8MHZ,而STM32最大工作频率是72MHZ。他可以通过HSI输入,HSE输入或两分频输入,通过PLL倍频(2-16),倍频之后输入给系统时钟。
MCO(时钟输出管脚)
通常对应STM32 PA8,它可以选择一个时钟信号输出,给外部的系统提供时钟源
首先打开startup_stm32f10x_hd.s,该文件为stm32的启动文件,在该文件内会发现有这么一块用汇编写的代码。
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
通过这段汇编代码可以看出,程序在执行main函数之前,会先执行SystemInit函数。
void SystemInit (void)
{
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC->CR |= (uint32_t)0x00000001;
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#ifndef STM32F10X_CL
RCC->CFGR &= (uint32_t)0xF8FF0000;
#else
RCC->CFGR &= (uint32_t)0xF0FF0000;
#endif /* STM32F10X_CL */
/* Reset HSEON, CSSON and PLLON bits */
RCC->CR &= (uint32_t)0xFEF6FFFF;
/* Reset HSEBYP bit */
RCC->CR &= (uint32_t)0xFFFBFFFF;
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC->CFGR &= (uint32_t)0xFF80FFFF;
#ifdef STM32F10X_CL
/* Reset PLL2ON and PLL3ON bits */
RCC->CR &= (uint32_t)0xEBFFFFFF;
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x00FF0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#elif defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || (defined STM32F10X_HD_VL)
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#else
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
#endif /* STM32F10X_CL */
#if defined (STM32F10X_HD) || (defined STM32F10X_XL) || (defined STM32F10X_HD_VL)
#ifdef DATA_IN_ExtSRAM
SystemInit_ExtMemCtl();
#endif /* DATA_IN_ExtSRAM */
#endif
/* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */
/* Configure the Flash Latency cycles and enable prefetch buffer */
SetSysClock();
#ifdef VECT_TAB_SRAM
SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */
#else
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */
#endif
}
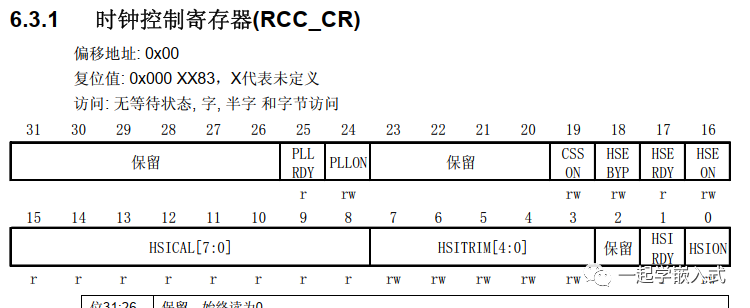
RCC->CR |= (uint32_t)0x00000001
通过查看寄存器手册可知,这段代码为打开内部8M时钟。
#ifndef STM32F10X_CL
RCC->CFGR &= (uint32_t)0xF8FF0000;
#else
RCC->CFGR &= (uint32_t)0xF0FF0000;
#endif /* STM32F10X_CL */
对应寄存器说明可查看《STM32中文参考手册_V10》的6.3.2 时钟配置寄存器(RCC_CFGR)章节。
后续代码,有兴趣可根据《STM32中文参考手册_V10》手册,查看代码具体作用。
static void SetSysClock(void)
{
#ifdef SYSCLK_FREQ_HSE
SetSysClockToHSE();
#elif defined SYSCLK_FREQ_24MHz
SetSysClockTo24();
#elif defined SYSCLK_FREQ_36MHz
SetSysClockTo36();
#elif defined SYSCLK_FREQ_48MHz
SetSysClockTo48();
#elif defined SYSCLK_FREQ_56MHz
SetSysClockTo56();
#elif defined SYSCLK_FREQ_72MHz
SetSysClockTo72();
#endif
}
system_stm32f10x.c文件中会根据芯片的型号定义对应的宏
#if defined (STM32F10X_LD_VL) || (defined STM32F10X_MD_VL) || (defined STM32F10X_HD_VL)
/* #define SYSCLK_FREQ_HSE HSE_VALUE */
#define SYSCLK_FREQ_24MHz 24000000
#else
/* #define SYSCLK_FREQ_HSE HSE_VALUE */
/* #define SYSCLK_FREQ_24MHz 24000000 */
/* #define SYSCLK_FREQ_36MHz 36000000 */
/* #define SYSCLK_FREQ_48MHz 48000000 */
/* #define SYSCLK_FREQ_56MHz 56000000 */
#define SYSCLK_FREQ_72MHz 72000000
#endif
void SystemInit(void);
SYSCLK(系统时钟)=72MHZ;
AHB总线时钟(HCLK=SYSCLK)=72MHZ;
APB1总线时钟(PCLK1=SYSCLK/2)=36MHZ;
APB2总线时钟(PCLK1=SYSCLK/1)=72MHZ;
PLL主时钟=72MHZ;
void RCC_AHBPeriphClockCmd(uint32_t RCC_AHBPeriph, FunctionalState NewState);
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
void RCC_APB1PeriphClockCmd(uint32_t RCC_APB1Periph, FunctionalState NewState);
void RCC_HSICmd(FunctionalState NewState);
void RCC_LSICmd(FunctionalState NewState);
void RCC_PLLCmd(FunctionalState NewState);
void RCC_RTCCLKCmd(FunctionalState NewState);
void RCC_HSEConfig(uint32_t RCC_HSE);
void RCC_SYSCLKConfig(uint32_t RCC_SYSCLKSource);
void RCC_HCLKConfig(uint32_t RCC_SYSCLK);
void RCC_PCLK1Config(uint32_t RCC_HCLK);
void RCC_PCLK2Config(uint32_t RCC_HCLK);
void RCC_APB2PeriphResetCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
void RCC_APB1PeriphResetCmd(uint32_t RCC_APB1Periph, FunctionalState NewState);
void RCC_HSE_Config(u32 div,u32 pllm)
{
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
if(RCC_WaitForHSEStartUp()==SUCCESS)
{
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2);
RCC_PCLK2Config(RCC_HCLK_Div1);
RCC_PLLConfig(div,pllm);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY)==RESET)
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK)
while(RCC_GetSCLKSource()!=0x08);
}
}

觉得文章不错,点击“分享”、“赞”、“在看” 呗!
