


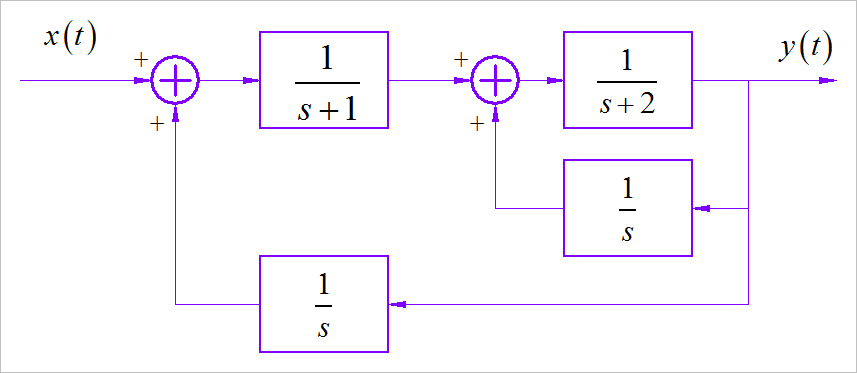
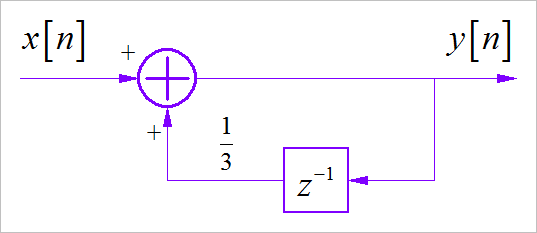
▲ 图1.1.1 LTI系统框图(1)
设置输入输出信号的 Laplace 变换分别为 。 根据系统框图的结果, 可以写出各个节点对应的表达式。
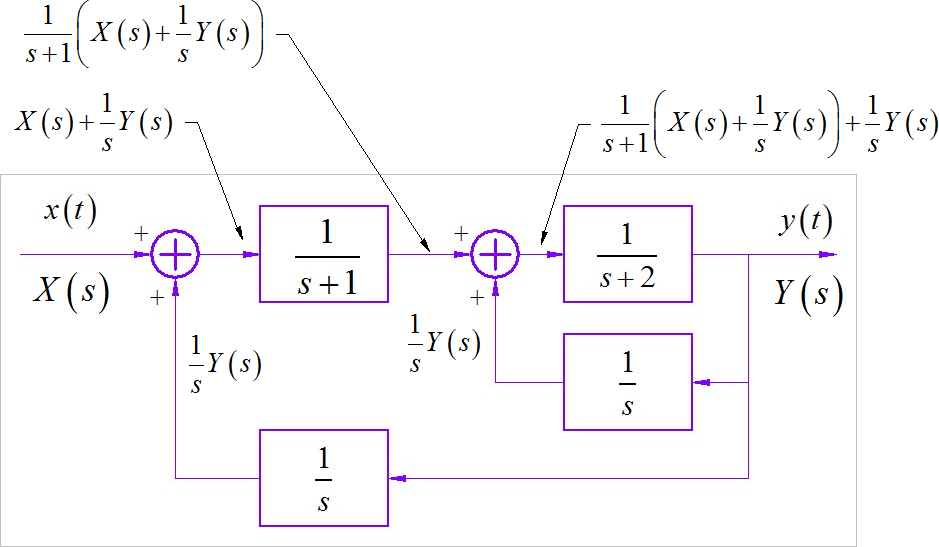
根据最后一个综合器的输出到系统输出之间的关系, 可以写出方程:

所以系统的系统函数为:

(2)
对 进行因式分解:

写出对应的时域表达式, 便得到系统的单位冲激响应:

(3)
由于 中包含有一个指数增加的分量, 所以 的绝对值积分趋于无穷大, 所以该系统是一个不稳定系统。
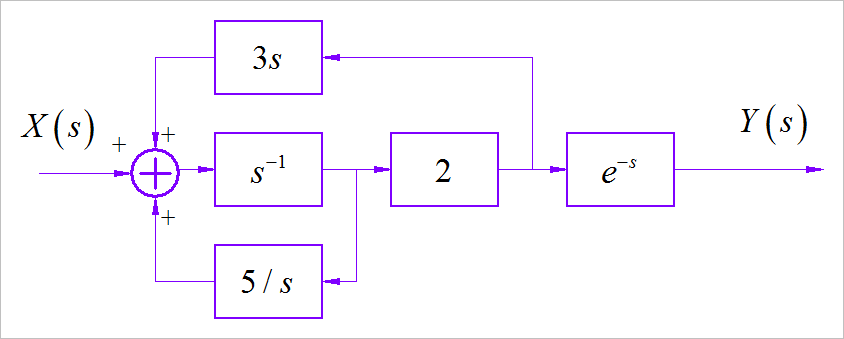
(1)
设 Y(s) 前面一个节点为 W(s), 那么 : 。
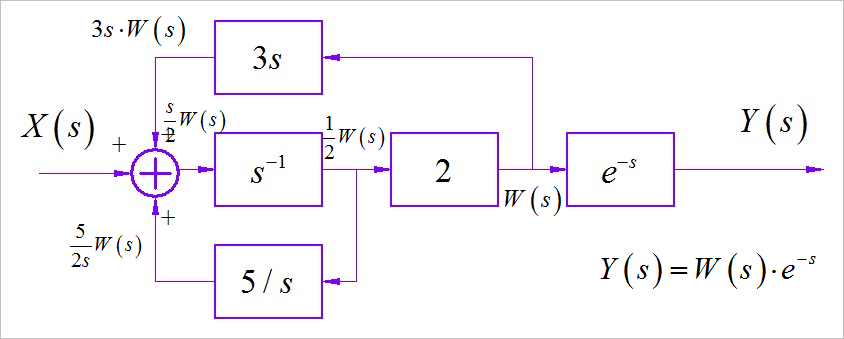
分别写出前面个之路的信号, 根据第一个综合器写出方程:

求解出 W(s): 那么:
那么:

可以得到系统的系统函数:
(2)
根据 , 对应的 Laplace变换为:

系统的零状态对应的 Laplace 变换为:

考虑

对应的时域信号表达式:

再根据 Laplace 时移特性, 系统的零状态输出是上述信号延迟时间 1:

(3) 由于 包含有一对共轭极点 , 位于虚轴上, 所以该系统不是一个稳定系统。
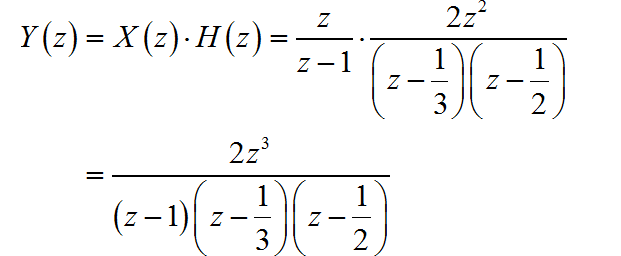
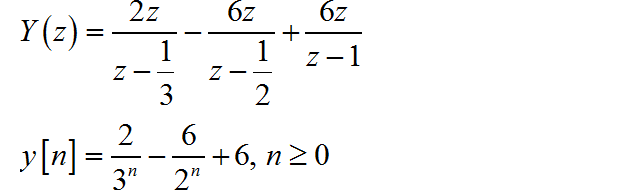
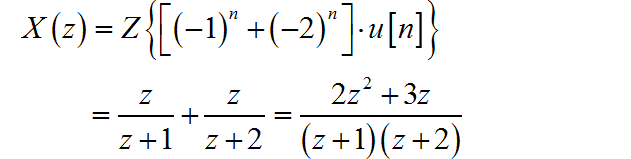
(1) 根据系统的零极点的分布, 可以写出系统函数:

其中的 是待定系数。 根据已知系统的初值 , 由 z 变换的初值定理:

所以系统的系统函数为 :

系统的单位样值相应 是系统函数 的 z 反变换结果。 根据因式分解方法, 可以写出 的时域表达式:

写出对应的右边序列表达式:

(2) 根据系统函数 , 可以写出对应的差分方程:

可以绘制出与差分方程对应的系统框图, 如下图所示:
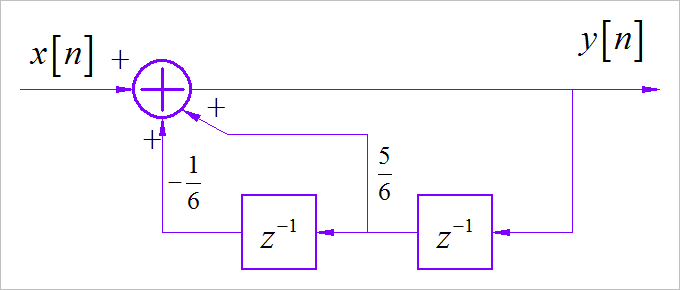
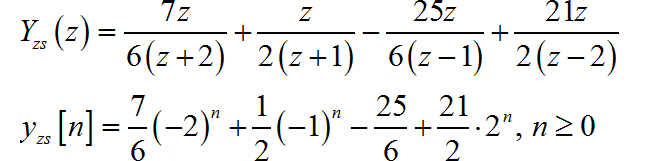
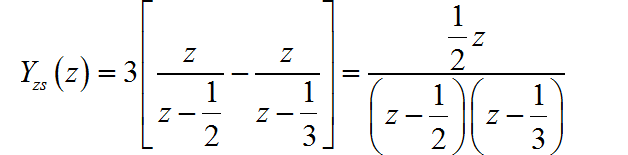
▲ 图1.1.1 离散时间系统的系统框图(3) 根据 , 所以 。 系统的零状态响应的 z 变换为:
利用因式分解, 可以获得 的表达式:
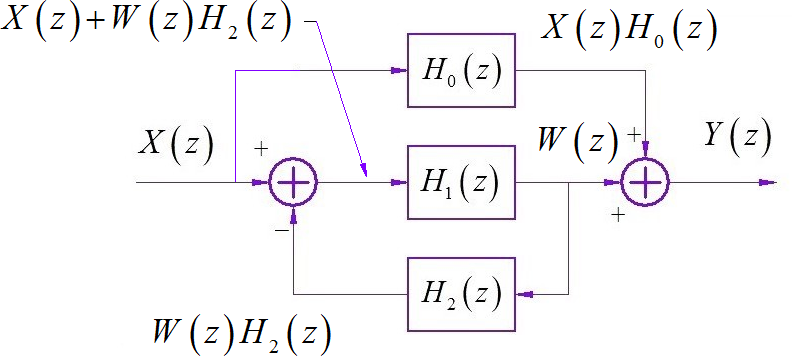
(1) 选择系统框图中 第二、三综合器之间的变量为 。 分别写出图中个支路对应的信号。 根据第二、三综合器写出两个方程。
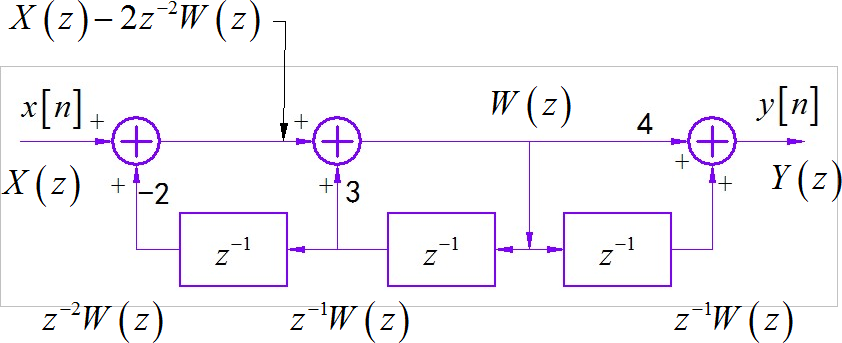
▲ 图1.1.2 设置有中间变量的系统框图
根据上面两个方程, 写出 与 之间的代数关系, 如下:

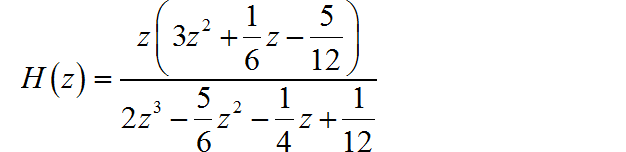
那么, 系统函数为:

(2) 将输入信号进行 z 变换, 得到输入信号的 z 变换表达式:
那么, 系统的零状态响应的 z 变换为:

利用因式分解方法, 求上式的 z 反变换, 可以得到系统零状态响应的时域表达式:
(3) 由于该系统的系统函数中, 存在有两个极点位于 单位圆外, 在单位圆上存在两个极点。 所以系统不是一个稳定系统。 由于系统是一个有理分式, 分子的阶次与分母的阶次相同, 该系统函数的收敛域包含 z 平面上的无穷远点。 所以该系统是一个 因果系统。
在系统框图中添加中间临时变量 。 写出系统中各分支对应的变量。
▲ 图1.1.4 设置了中间变量的系统框图 根据系统框图中累加器关系,可以得到如下方程:
消去 临时变量,得到系统函数:

根据系统给出的 表达式,代入上面 , 可得:
进行因式分解,可得: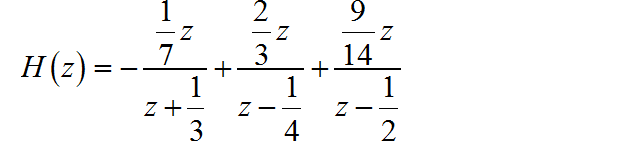
写出相同响应对应的右边序列:

(2) H(z) 的极点都在单位圆内, 系统是未定的。
系统的零状态响应与输入信号之间的关系可以由卷积运算而得: 。 在 Laplace 变换域内, 它们之间是乘积关系: 。 所以 系统的输入的 Laplace 变换等于: 。 根据已知的 , 可以知道它们对应的 Laplace 变换分别为:
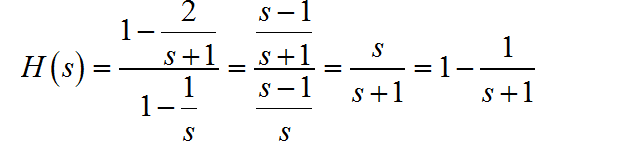
 因此:
因此:
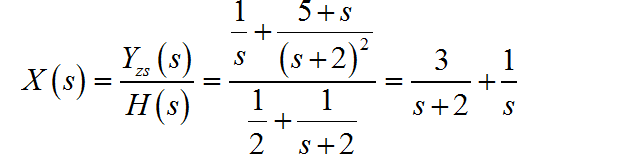
所以,输入信号为:

(1) 根据系统的差分方程, 可以写出系统的系统函数:

根据系统的零状态输出, 可以写出它的 z 变换:
那么系统的激励信号的 z 变换为:
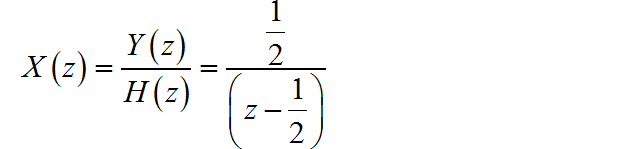
对应的时域序列信号为:
(2) 根据系统的差分方程, 系统的一种实现结构框图如下图所示:
▲ 图1.2.1 离散时间系统的系统结构图(1) 这个题目原来是在第二章, 现在在 Laplace 变换域内讨论这个题目的求解过程。 将两次系统的输入和输出都进行 Laplace 变换。
系统的完全输出等于零状态响应加上零输入响应:
上面两个表达式相减,可得:
 所以
所以
进行 Laplace 反变换可得:

(2) 根据已经求得的 , 可以求得 :

进行 Laplace 反变换,可得:

(3)
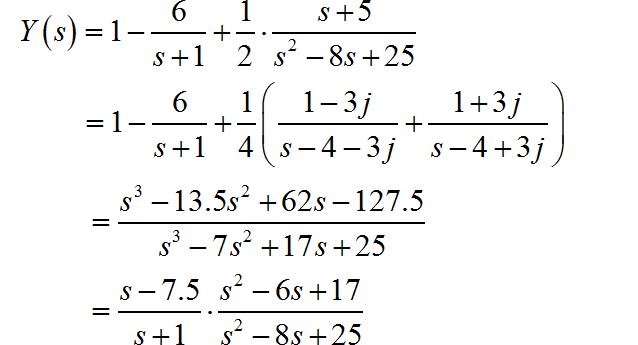
将 进行 Laplace 变换:

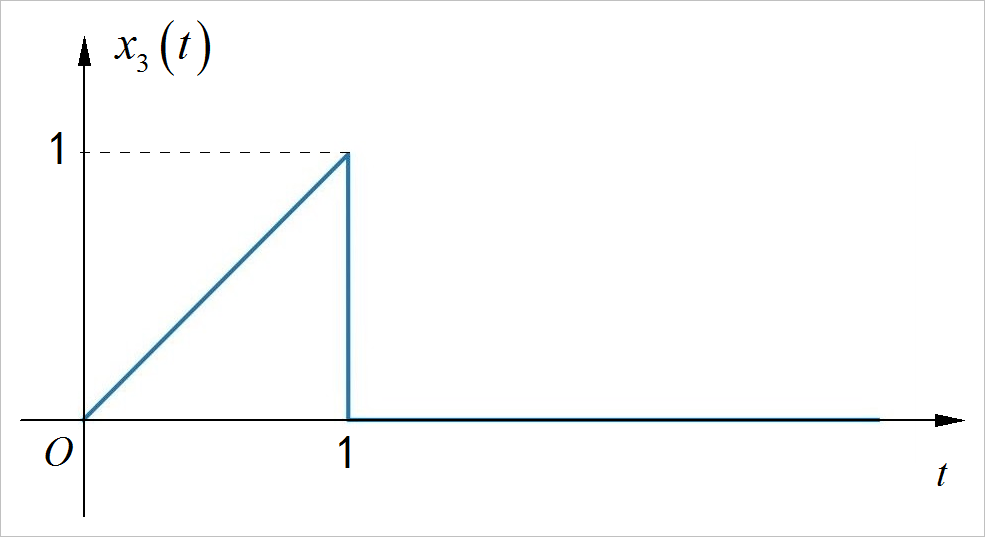
▲ 图1.2.2 x3(t)信号那么系统的完全响应为:
对应的时域信号为:

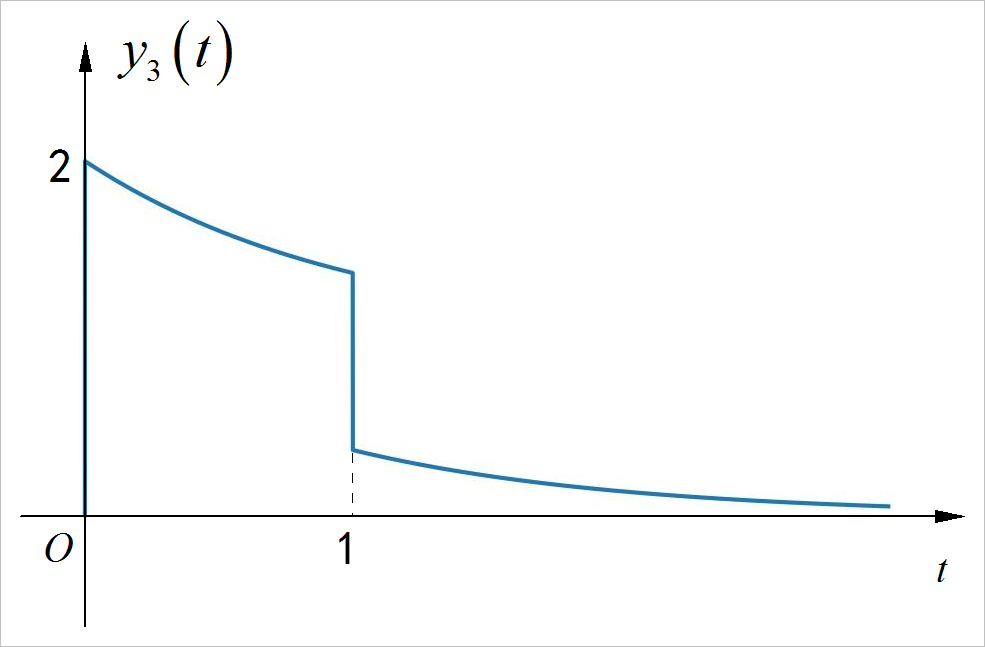
▲ 图1.2.3 系统的完全响应 y3(t)(1) 根据系统框图,可以写出系统的系统函数为:
(2) 系统函数的两个极点分别为:

当 时, 对应的极点都位于 s 平面的左半平面, 系统稳定。
(3) 当 , 即 时, 系统函数具有二重极点, 极点为 。 此时, 系统函数为:

系统的单位冲激响应为:
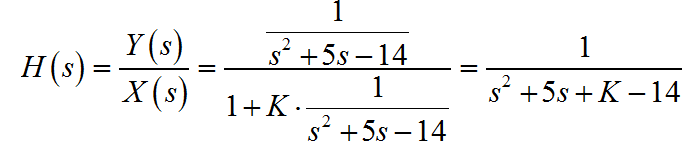
(1) 根据系统框图,可以得到如下方程:

简化之后, 可以得到系统的系统函数为:

(2) 整理系统函数如下:

系统函数的两个极点分别为:

下面绘制出l个极点对应不同 K值变化情况。
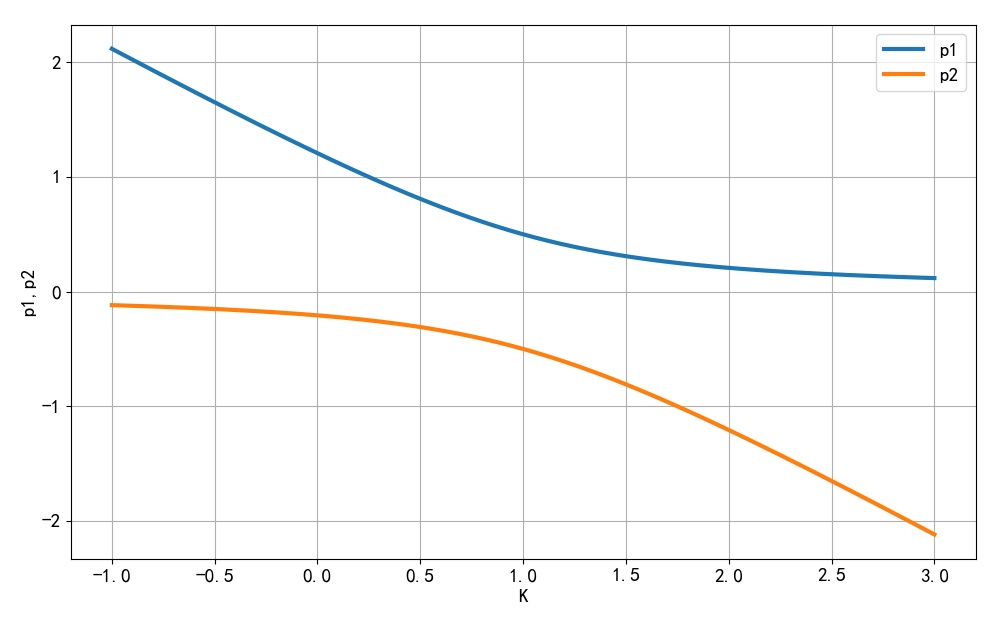
▲ 图1.3.1 不同的K对应两个极点的取值分别求出一下两个方程对应的根, 可以知道 K 取值在 之内时, 两个极点都位于单位圆内。
因此, 当 时, 系统是稳定的。
(1) 系统的系统函数为:

系统的极点为 , 位于单位圆外。 该因果系统为 不稳定系统。
(2) 系统的系统函数为:

系统 在 处有一个两阶极点,所以该系统为不稳定系统。

1、根据系统是因果、稳定、LTI系统, 可以知道系统的有利系统函数的极点都位于 s 平面的左半平面。
2、根据系统在 的左腋下, 系统的输出为加v对可积, 表明 的有炼狱包含着虚轴, 即 没有 出的极点, 所以 至少包含有一个 的零点。
3、根据系统在 的作用下, 系统的输出不是绝对可积, 因此, 在 处的零点不超过两阶, 所以系统函数可以写成:

4、根据 ${{d2 } \over {dt2 }}h\left( t \right) + 3{d \over {dt}}h\left( t \right) + 2\left( {s2 + 3s + 2} \right)H\left( s \right)B\left( s \right) = s2 + 3s + 2$ 。
5、根据 在无穷远点只有一个一阶零点, 说明 的分子比分母阶次小于 1, 所以系统函数可以写成:

6、根据 , 可以求得:

最终, 该系统的系统函数为:

将 进行 Laplace 变换:
由于 是实数函数, 所以 应该包含有共轭函数:
 所以:
所以:

对比LTI输出信号的表达式, 可以知道 。

因为

(1) 为了 , 分别考虑在 和 作用下, 在 上所形成的电压。
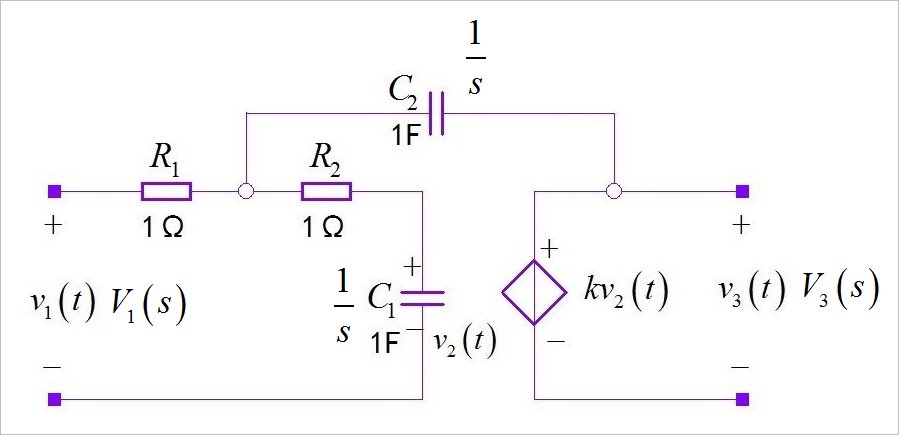
▲ 图1.5.1 s域内的电路图考虑 时, 仅仅在 作用下 C1 上的电压:

考虑 时, 仅在 作用下, C1 上的电压:

所以:
 在根据
在根据

对上面表达式进行化简:

电路的系统函数为:

(2) 当 时, 对应的电路系统函数为:

进行 Laplace 反变换, 可以得到电路的单位冲击响应:

电路的单位阶跃响应:

进行 Laplace 反变换, 可以得到电路的单位阶跃响应:

电路的单位阶跃响应如下图所示:
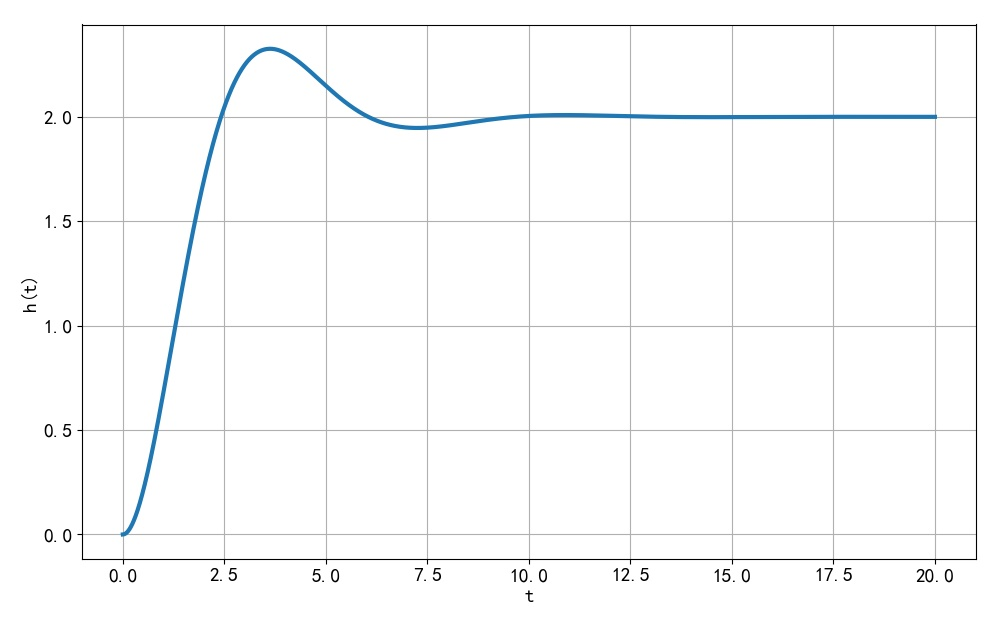
▲ 图1.5.2 电路的单位阶跃响应根据对称的 LC 网络, 将其整理成对称的交流电桥的形式, 如下图所示。 负载R连接在电桥的中点电压。
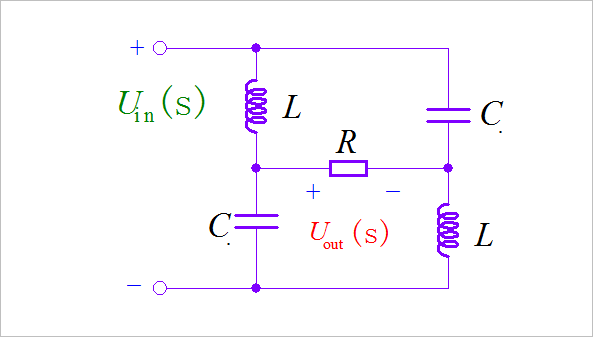
为了简化电路求解, 利用戴维宁定理, 将电桥两边分别等效成电压源与电抗的串联形式。 电路的等效形式如下图所示。 两边的等效电路中, 恒压源 为输出开路时对应的 LC 分压数值。 电压源的内阻 为从网络输入端口处的等效交流电阻。
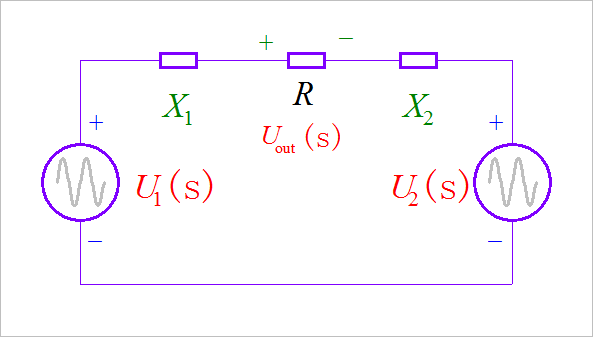
下面分别计算出 以及 。
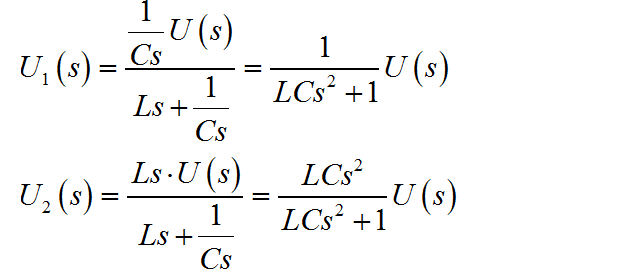
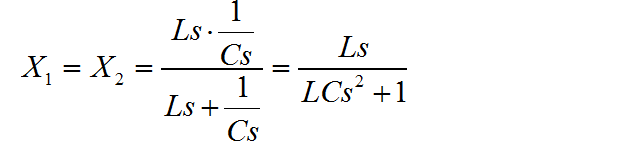
作用在输出电阻 R 上的输出电压为:
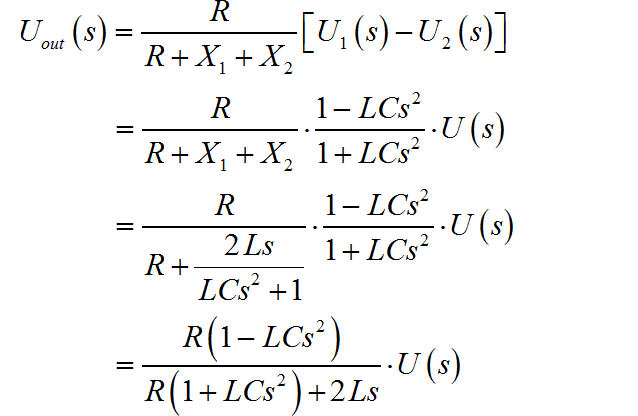
所以,电路的传递函数为:

当 时, 对应的电路传递函数可以化简为:

此时, 该系统为一个全通电路系统。
信号与系统 2023(春季) 作业要求 - 第十二次作业: https://blog.csdn.net/zhuoqingjoking97298/article/details/130732652?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22130732652%22%2C%22source%22%3A%22zhuoqingjoking97298%22%7D

