点击上方蓝字谈思汽车
获取更多汽车行业资讯
背景
在汽车产业智能化的大背景下,汽车的功能变得更加丰富和智能,随之带来的是车辆的各种电子控制器的交互变得越来越复杂,传统的分布式电子电气架构已无法满足日趋复杂多样的汽车功能,汽车电子电气架构也要随之进行升级和进化。根据汽车电子电气架构的演进趋势来看,电子电气架构正在向着更加先进的域集中架构、跨域融合架构以及车辆集中式架构的方向快速发展。
在跨域融合架构阶段,为了进一步增强协同,在域集中架构的基础上,出现了跨域融合的概念,即将多个域功能集成在一起,并进一步融合功能关联度较高的其他功能,由功能域控制器将此类域功能进行集中。比如,在域集中架构阶段,动力域和底盘域分别承担了车辆动力系统和车辆底盘系统控制的功能,而在跨域融合阶段,动力域和底盘域可以进行融合,共同承担了车辆运动相关的控制,进一步形成了车辆运动域的概念。车辆运动域对于动力以及底盘系统的协同控制,可以在提高能效、驾驶乐趣和舒适度的同时,实现简化系统、降低成本的目标,同时可以通过可扩展和模块化的设计,以适应客户多样化的需求。

整车运动域控制器平台(VCU8.5)

联合电子推出了面向跨域融合的整车运动域控制器VCU8.5平台。该平台在前代整车控制器的基础上进行了功能的升级和优化,特别是针对跨域融合控制的需求进行了系统的分析和设计,集成了EPB、FlexRay和Delay off等功能,具备更加强大的性能和更广泛的适用性,为新能源汽车的“车辆运动融合控制”提供初步的探索。
VCU8.5整车运动域控制器产品除了具备上一代控制器基本整车控制器功能和系统解决方案以外(详细请见:联合电子新一代高性能整车控制器平台(VCU8.1)),其特殊功能体现在如下几个方面:
更加丰富的通讯资源,除支持CAN/LIN/Ethernet等多种通讯方式外,新增FlexRay通讯方式,支持更高速率、更高容错率、更高灵活性和更高确定性的数据传输
支持EPB冗余控制,车辆的左右卡钳由不同控制器分开控制,即使一侧卡钳或其控制器发生故障,另一侧卡钳仍可单独控制,提高了EPB控制的安全性
支持Delay off控制,即使控制器发生非预期的软件reset,Delay off功能仍然能够保持继电器吸合一段时间,提高系统的稳定性
支持车用Cyber Security技术
功能安全达到了ISO26262 ASIL D等级
支持A/B备份模式的远程刷新(FOTA)
VCU8.5平台支持Full Calibration系统解决方案,以及单独提供硬件和底层软件的Software sharing解决方案等多种灵活的合作模式。
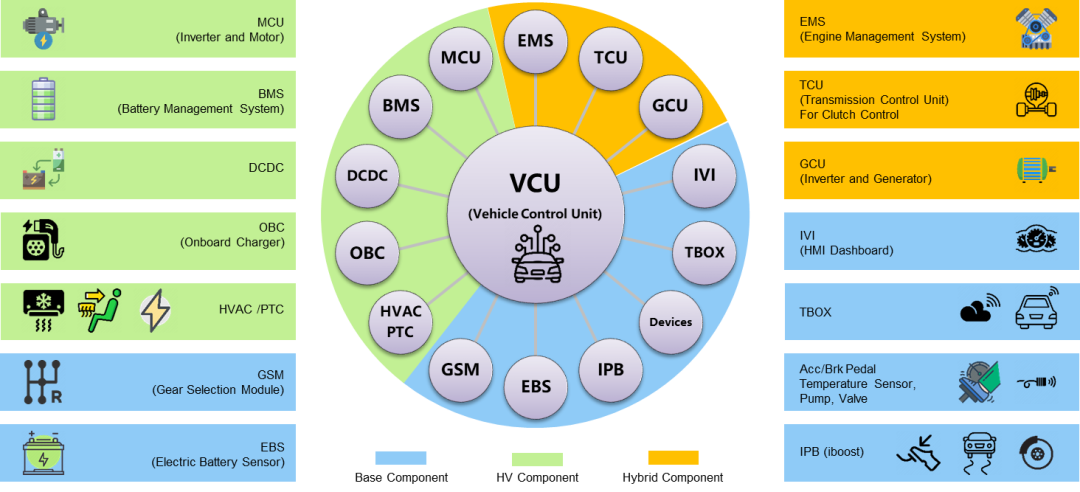
图1 VCU协调控制的高低压部件
作为车辆驱动协调控制系统的核心控制器,VCU需要负责整车状态协调、驾驶员驾驶需求实现等最基本也是最重要的功能。因此VCU软件的完善度直接影响了车辆运行的稳定性和行驶安全性。随着“域融合”的概念推广,越来越多的新功能也逐渐被融合到VCU控制器中,例如:跟充电相关的AC/DC车辆端充电主控功能,以及跟底盘相关的电动四驱控制功能。
从系统功能划分角度考虑,可以把VCU的功能划分为:车辆系统、传动系统、电力系统、热管理系统,以及OBD诊断、通讯、安全监控等系统功能。VCU的主要功能如下图2。
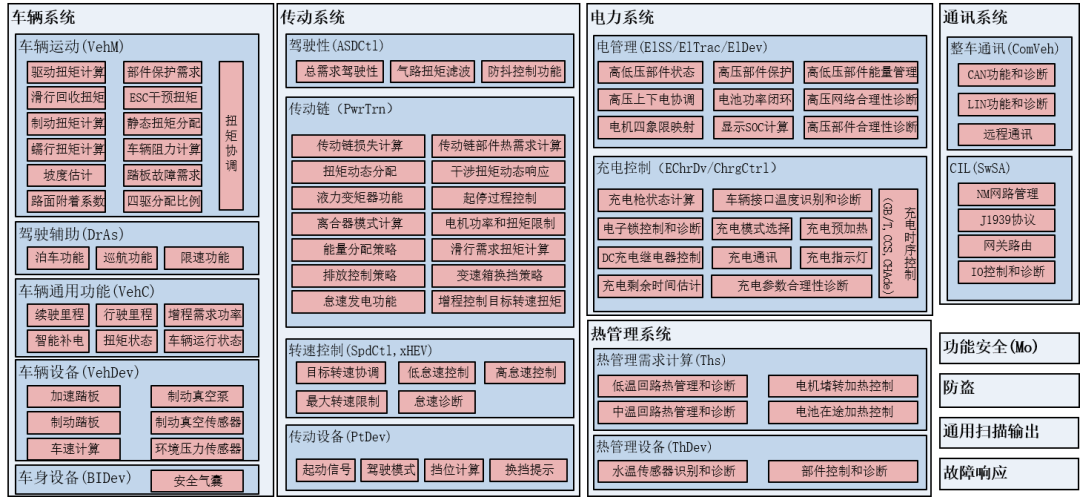
图2 VCU系统功能分类和概览
VCU软件核心功能介绍
基于多个已经量产的客户项目,经过多年的系统知识建立和功能软件开发验证工作,目前联合汽车电子的VCU软件已经在“扭矩”“电”“热” 三个核心领域都具备完整的并且可根据客户需求灵活配置的VCU系统解决方案。本文会主要围绕与“扭矩”相关的车辆驱动方面介绍一些VCU软件中的核心功能。后续还会有其它文章介绍与“电”“热”相关的核心功能介绍。
支持多模式的车辆运行模式管理功能(混合动力)
混合动力车辆的运行模式决策和切换过程控制可以实现:纯电运行、串联增程、并联驱动三种运行模式决策和切换(图3)。
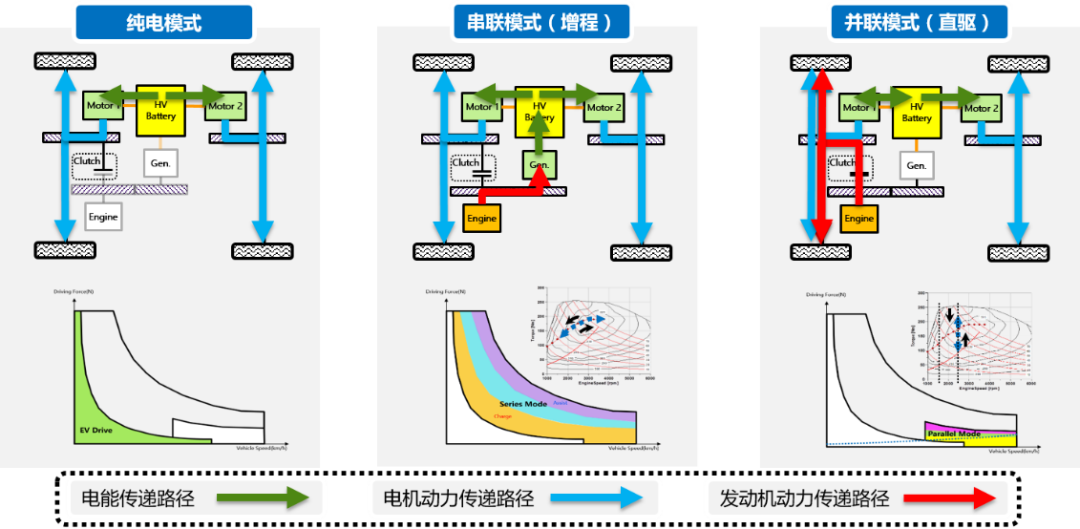
图3 混动运行模式和能量流
整车运行模式决策功能基于ECMS(等效燃油消耗最小)算法(图4),在各种工况下决策出能量消耗最小的运行模式(图5)并实现电机/发动机最优能量分配比例,以达到更好的动力性和经济性:在中低速时通过增程器发电,使发动机始终工作在高效区并为动力系统提供动力源;在高速时让发动机和电机共同驱动车辆行驶,满足动力性和经济性需求。该模式决策相比行业中应用广泛的基于规则的能量管理策略,ECMS能够达到更好的节油效果,与全局优化策略和基于工况自适应的能量管理策略相比,ECMS能够更好应用于实际工程项目中。
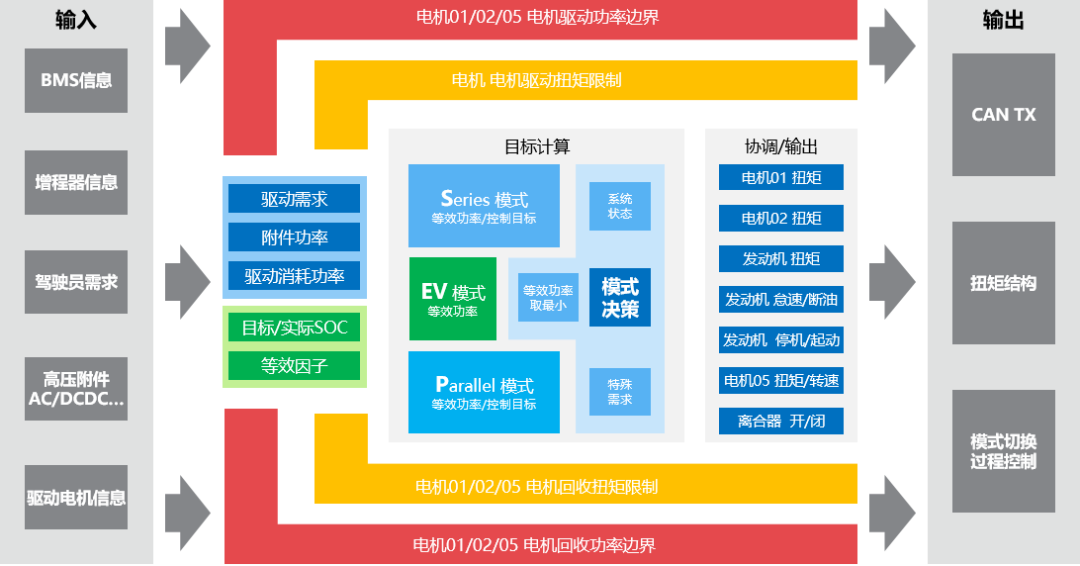
图4 混动模式管理功能架构

图5 WLTC循环中模式分布
当车辆运行工况发生变化车辆运行模式需要切换时,模式切换过程控制功能可以确保在不影响驾驶员驾驶需求扭矩实现的前提下,VCU通过协调发动机、增程器、驱动电机和离合器之间的转速和扭矩配合,实现快速平稳的模式切换控制过程(图6)。
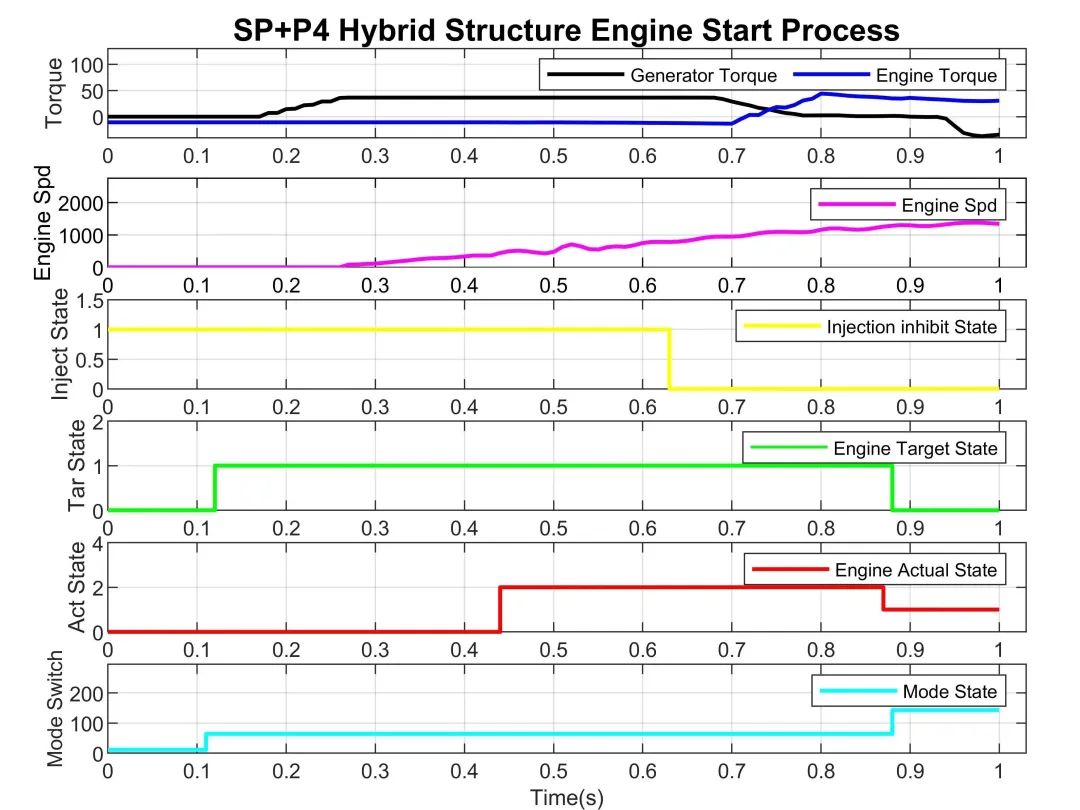
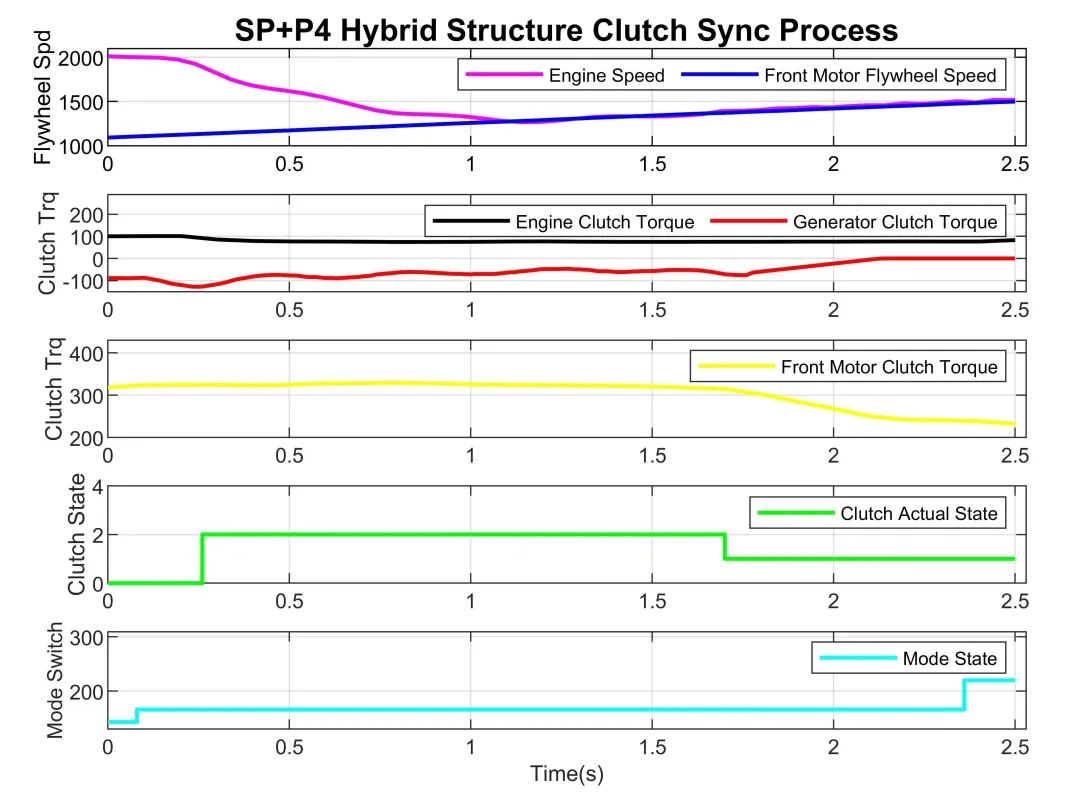
图6 模式切换过程测试效果
基于部件物理层级的扭矩管理
扭矩管理需要协调来自驾驶员、驾驶辅助功能的驱动和制动扭矩需求,并可以根据整车运行模式功能和模式切换功能的输出,协调各驱动部件(发动机、发电机、前驱动电机、后驱动电机)准确响应各种来源的扭矩需求。
已开发应用的扭矩管理功能实现了可灵活配置拓展的扭矩结构(图7),可支持纯电、混动项目,四驱/两驱项目的灵活配置。基于实际部件物理层级的扭矩结构,也更易于拓展应用到其它拓扑结构的混合动力/纯电车辆。
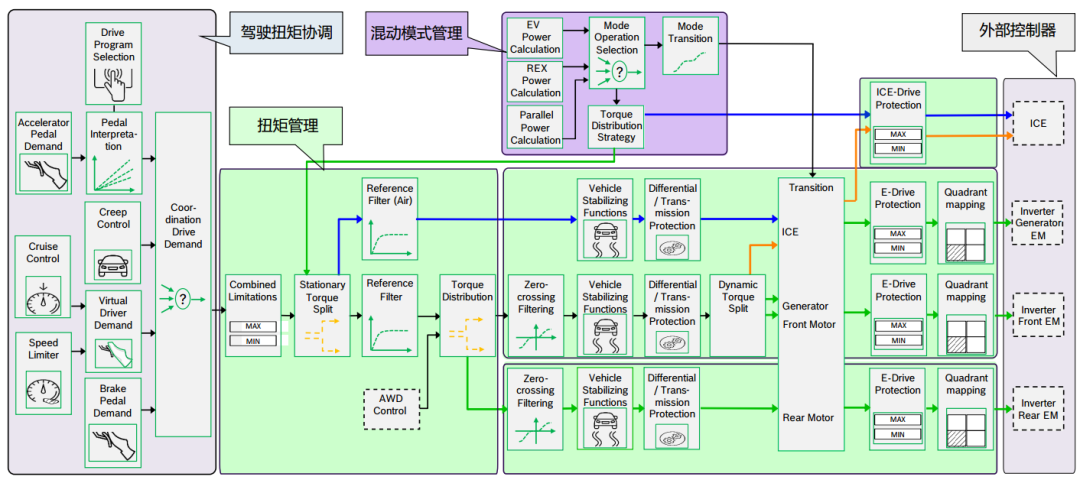
图7 扭矩管理示意图
多种分配方式的四驱控制功能
四驱控制功能是将驾驶员需求扭矩按照当前四驱控制需求进行前后轴扭矩分配,最终输出至前后驱动电机,四驱控制功能在分配前后轴扭矩时能够充分考虑不同因素的影响,兼顾整车的经济性,动力性和操纵稳定性。也可以识别车辆的运动趋势,主动介入车辆的运动控制,实现无级全范围分配比调节(图8)。
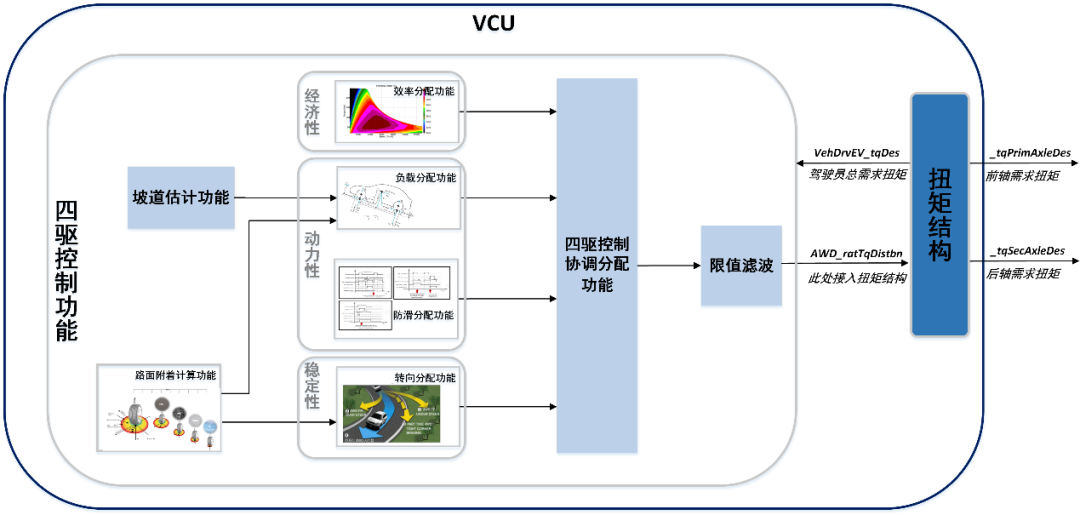
图8 四驱控制功能架构
四驱经济性分配功能可以在平稳驾驶的过程中使前后轴驱动电机工作在当前需求下的系统整体效率最优点,实现双电机、三电机及四电机的效率最优分配,降低能耗增加续航里程。
四驱动力性分配中的负载分配功能可以通过识别当前路面坡度及车辆加减速情况,建立前后轴载荷模型计算前后轴扭矩的最佳分配比,在载荷转移时通过前后轴扭矩智能分配充分利用地面最大附着力,减少车轮滑转提高车辆加速能力(图9)。

图9 加速负载转移四驱分配测试效果
四驱动力性分配中的脱困防滑功能能够在车辆单轴处于滑转状态时主动调整前后轴扭矩分配向未滑转轴转移,降低动力损失,在识别到前后轴交替滑转时,动态控制前后轴扭矩分配,充分利用路面附着系数,提高车辆在低速时的脱困能力,降低无力感,提升驾驶舒适性。(图10)
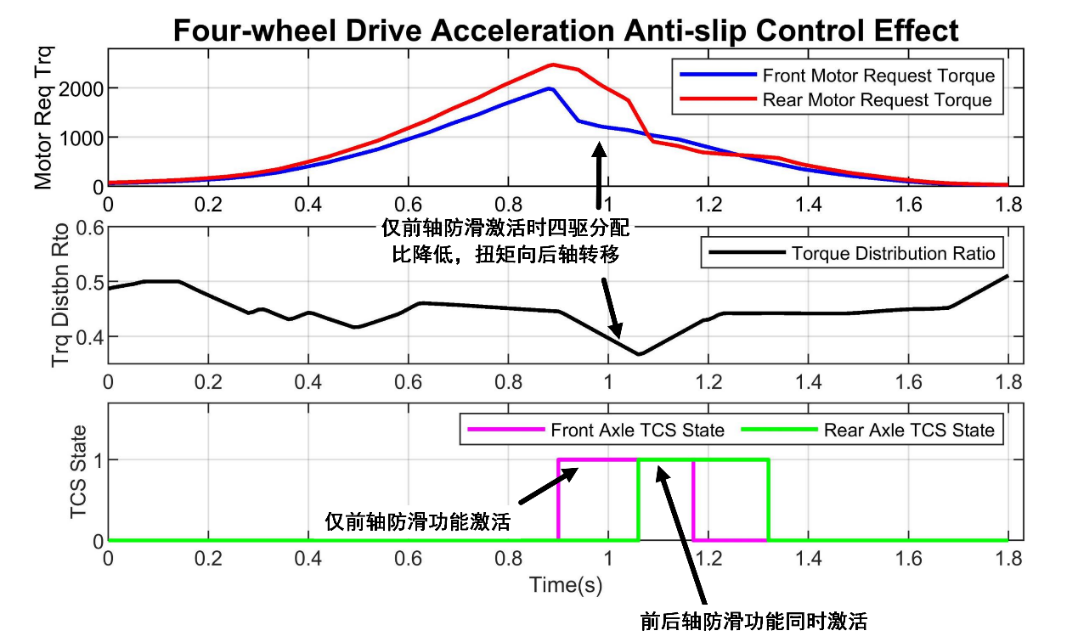
图10 驱动防滑功能测试效果
四驱操纵稳定性分配使汽车跟随驾驶员转向意图,提高转向敏捷度,主要包含转向状态监测与转向扭矩控制。可以在ESP介入前通过前后轴扭矩分配实时调整车辆运动姿态,及时抑制车辆转向不足(US)和转向过度(OS)的失稳状况发生,在加速转向工况降低ESP的介入频次,减少制动冲击与横摆感,提高驾驶员的驾驶感受(图11)。
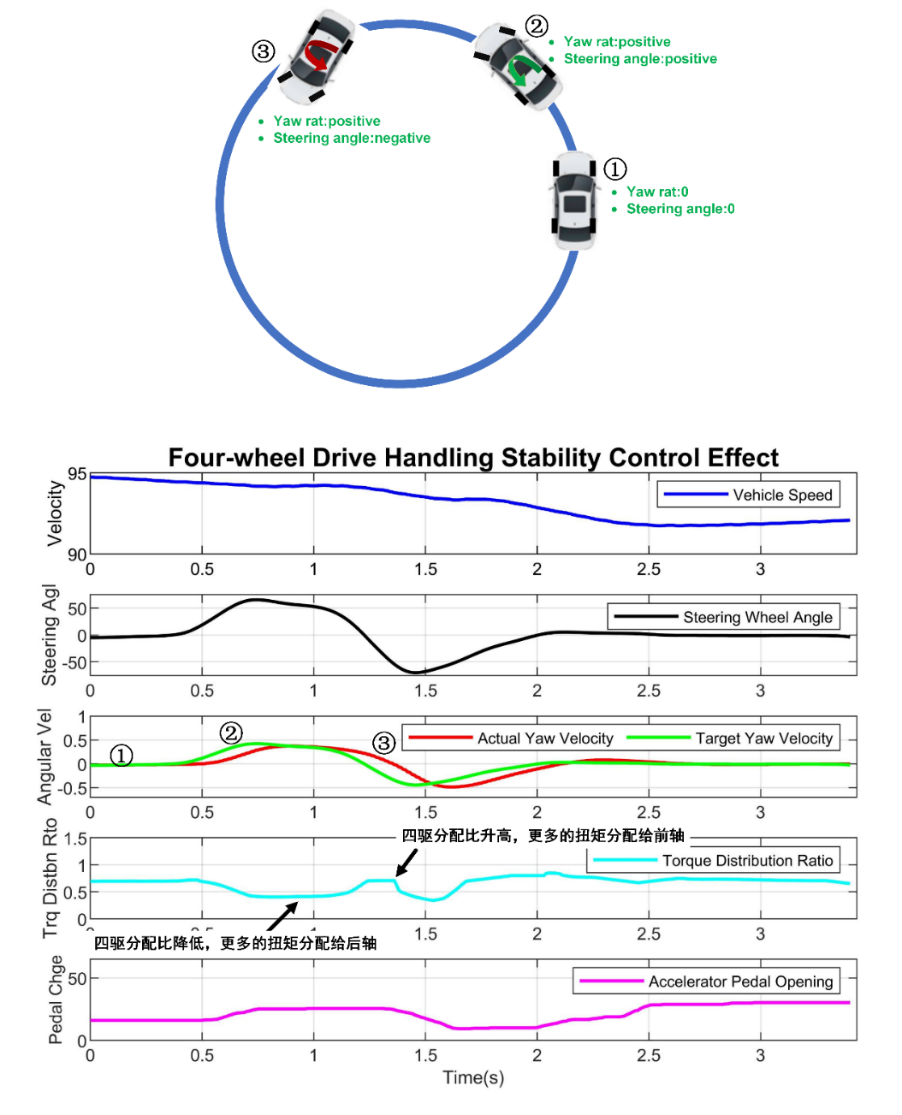
图11 OS及US工况下的稳定性控制
四驱控制功能具有很强的扩展性和通用性,在EV和PHEV车辆上都可以使用。该方案将动力域与底盘域的部分相关控制功能进行了整合,提高了车辆运动相关的跨域整合能力。
支持 Reset后可自动恢复行驶状态的电管理功能
如上文中提到VCU协调的部件很多,其中很多是高压电力部件。因此VCU主要的工作之一是负责高低/压电力系统的控制。包括:高压上/下电协调、高压功率分配和限制、高压部件信息处理(包含D/R挡切换时的电机四象限映射),以及部件的诊断和保护功能。电力系统的稳定性和安全性很大程度的决定了整车的运行状况。
对于电子控制器来说,在整个生命周期内很难避免完全不发生复位,比如VCU自身内部导致的硬件复位、软件复位,以及外部干扰导致的复位等。虽然复位时间很短(比如软件复位,发生复位到恢复通讯大概不到0.2s),但如果在有些场景(如高速行驶时)复位后不能尽快自动恢复之前的状态,则车辆会失去动力,进而可能会给驾驶员带来非常大的安全隐患。
特别是对于整车控制器VCU,很多动力相关的部件都受其控制。并且在正常情况下,如果要进入行车就绪状态,一般需要至少两个不同的操作(如踩刹车、按启动按钮、换挡等);而一旦在高速工况下出现了控制器复位,很多复位前储存的信号会被初始化,此时如果仍需要驾驶员两个连续不同操作,则可能出现非期望的减速,甚至造成追尾事故。
上述方案经过实车测试,在VCU发生复位后约0.11s后恢复通讯,该功能可以在0.19s内自动恢复高压状态,0.25s后自动恢复整车驱动就绪状态,0.38s后自动恢复D挡并完成整个恢复过程。不需要驾驶员任何操作,整车恢复正常行驶状态且没有发生长时间动力丢失的现象(图13)。
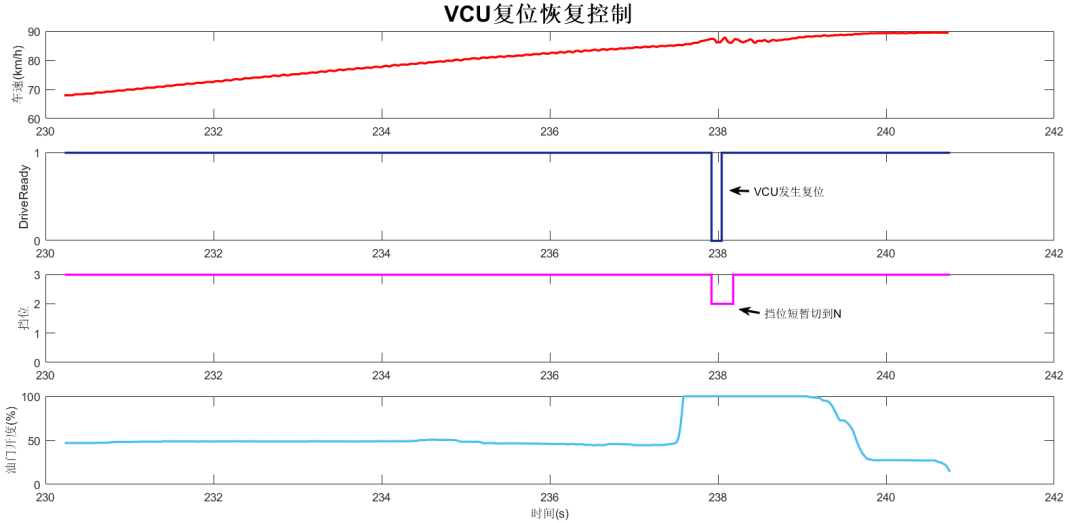
图13 VCU 复位后自动恢复可行驶状态实测效果
支持多种协议的VCU充电主控功能
充电控制功能负责识别不同模式的充电需求,根据不同的模式选择对应充电控制过程。与供电设备(EVSE)、动力电池BMS等充电相关部件协调交互,实现充电使能条件判断,充电过程监控,充电结束条件判断等功能。开发的软件不仅能实现支持国标交流/直流充电协议,也能满足欧洲和北美的联合充电系统(CCS)以及日本CHAdeMO充电协议(图14)。为了解决充电设备的兼容性和充电时长难以满足电动车车主的需求,软件也实现了超级充电标准的充电控制功能。
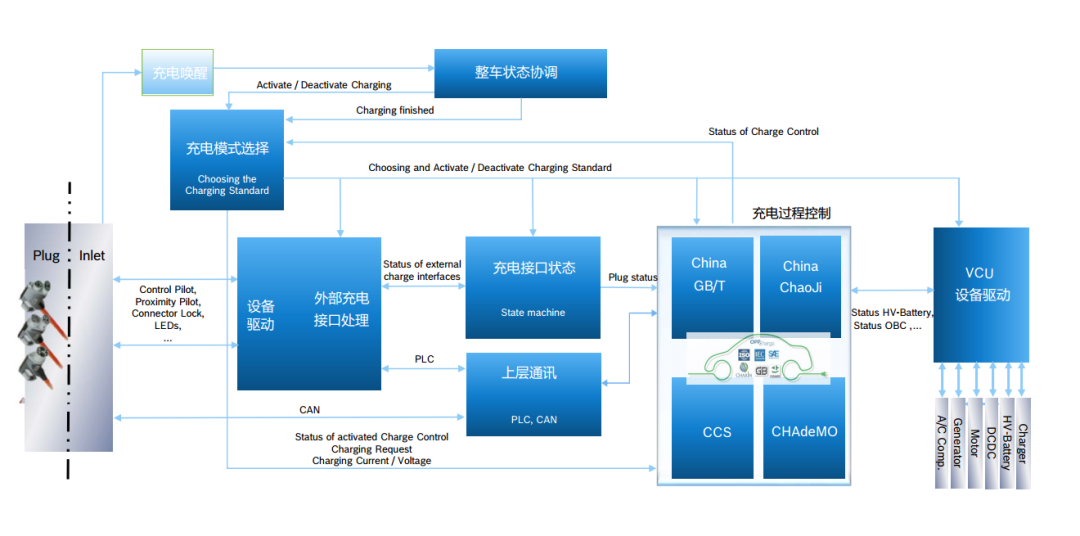
图14 充电控制软件架构
剩余充电时间是指电动车开始充电到充电结束所花费的时间,充电时间随着车辆电量增多逐渐减小。剩余充电时间估算功能要求车辆在充电开始阶段就能准确预测整个充电过程所花费的时间,但电动车充电过程中,充电时间受电芯特性、充电策略、桩输出能力、整车热管理和SOX估算精度等多个因素的影响,因此,高精度的剩余充电时间估算一直是行业难题。
在充电过程中,算法通过增加充电桩输出能力修正因子来预测未来充电桩最大输出电流。对于高低温工况,除了在充电开始前计算电池预热、预冷时间外,充电时间算法在充电过程中也会基于电池热模型和电池包热管理策略,预测未来电池温度,进而确定电池未来的充电电流。对于充电末端,由于SOC精度造成充电时间偏差,算法增加基于单体电压的充电时间倒计时算法以提高末端充电时间估算精度(图15)。
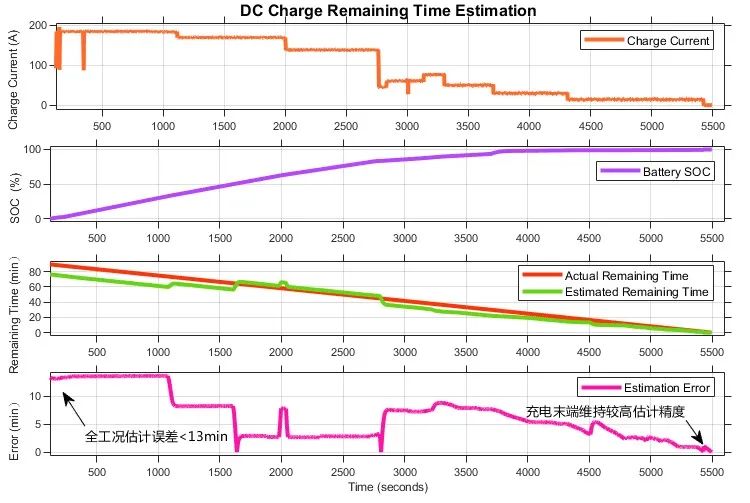
图15 直流充电剩余时间计算实测效果
支持充电预热的中低温回路热管理控制
热管理控制功能可以协调来自于电池、电机、发动机和驾驶舱等的加热或冷却需求(图16),结合整车模式来决策和切换热管理控制模式,进而控制各子系统准确的响应各种来源的热管理需求。开发的软件可以适用于纯电和混动项目中的多种热管理拓扑结构。
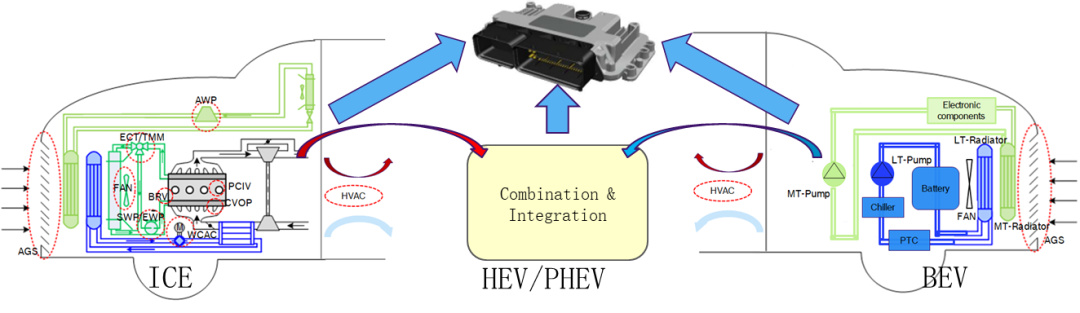
图16 VCU热管理需求来源
充电预热控制可以实现用户在低温插枪充电时,根据电池的预热请求,控制电池处于预热模式。在充电机输出能力范围内,由充电机输出功率通过电池加热器(PTC)对电池加热。因为在充电预热模式下,电池的主继电器在断开状态,能确保电池不会有电流输入或输出,确保不会对低温条件下的电池造成损坏。当电池被加热到合适温度后,再控制电池退出预热模式进入正常的充电模式。方案实现了在低温下给电池充电有效保护电池的同时,缩短充电时间,给用户带来更好的充电体验(图17)。
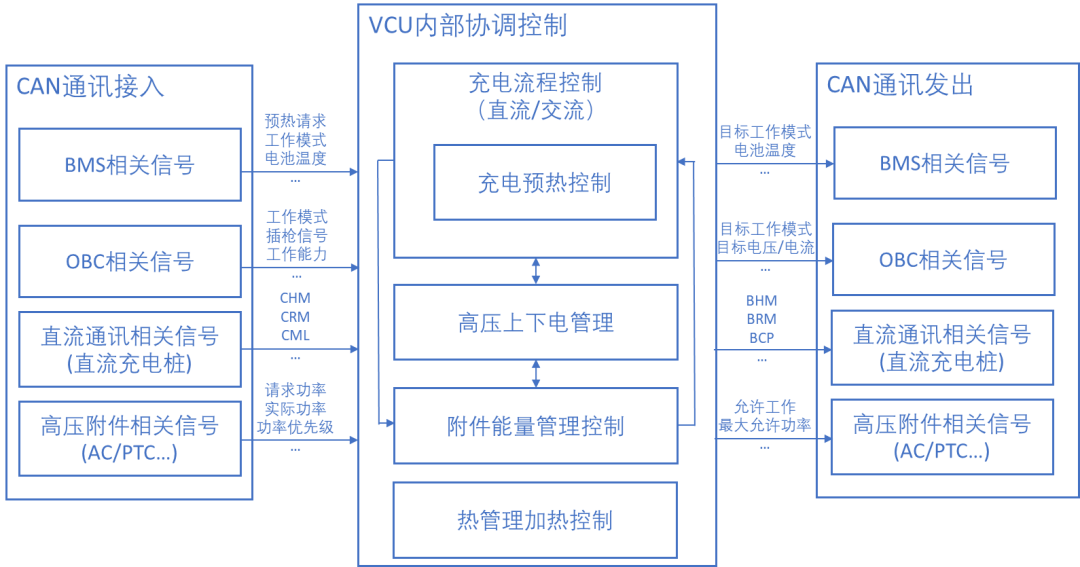
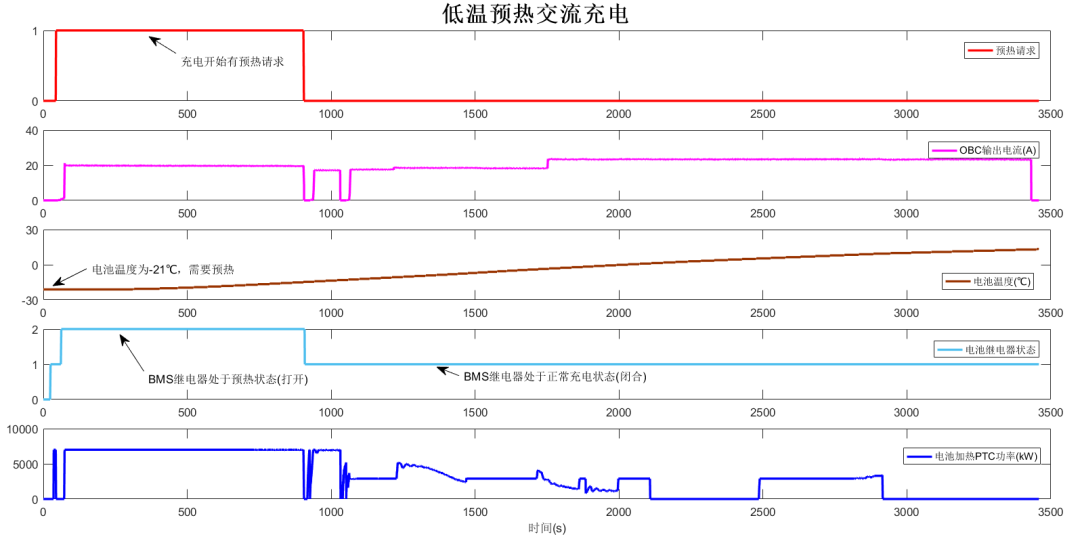
图17 低温交流充电预热实测效果
低温环境兼顾功率保护和驾驶性改善策略
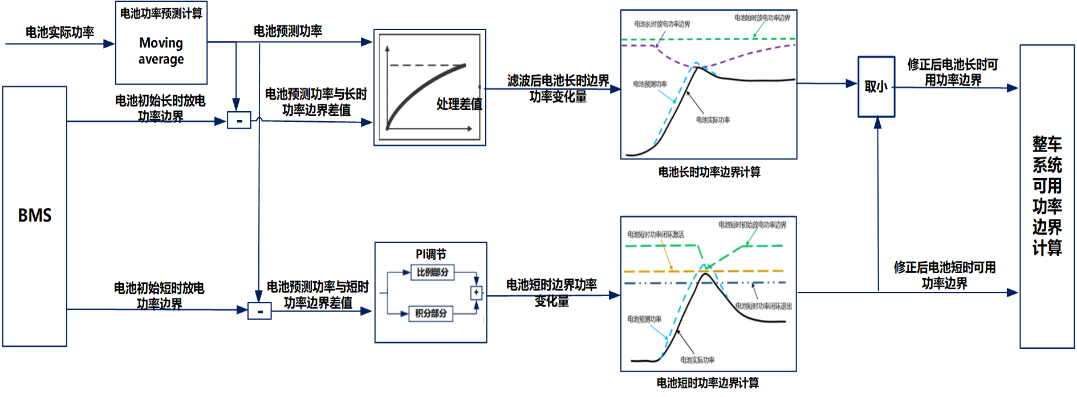
在电池温度很低时电池的充放电功率受限,行车过程中会经常用到电池的功率边界。当整个系统在功率边界附近运行时,会非常容易导致电池过充或过放发生。此时系统会进行快速闭环调节以把电池功率调整到正常范围内,但这会导致驾驶性变得很差。因此如何在低温环境下同时兼顾功率边界保护和可接受的驾驶性两方面一直是行业的有个难题。
尤其对于多电机串并联四驱拓扑结构,各个电机实际功率都会相互影响彼此的功率边界,是一个相互影响的多层闭环控制,某一个高压部件功率抖动都会影响其他部件的抖动(图18)。因此,在极低温度时电池输入输出功率受限,并且拓扑结构中存在多电机耦合时,更容易造成电池过充过放以及驾驶性抖动。
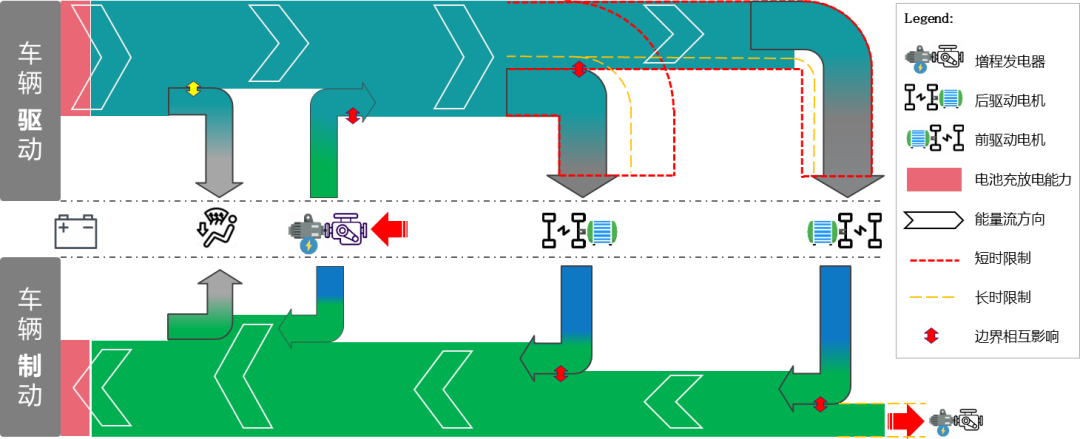
图18 多电机串并联四驱拓扑功率边界影响示意图
以低温环境下起步全油门加速工况为例,通过上述软件优化措施,当低温工况发电机实际功率波动情况下,也可以保证电池功率不过放,并且前后电机准确响应扭矩边界限制,避免驾驶抖动的发生(图20)。
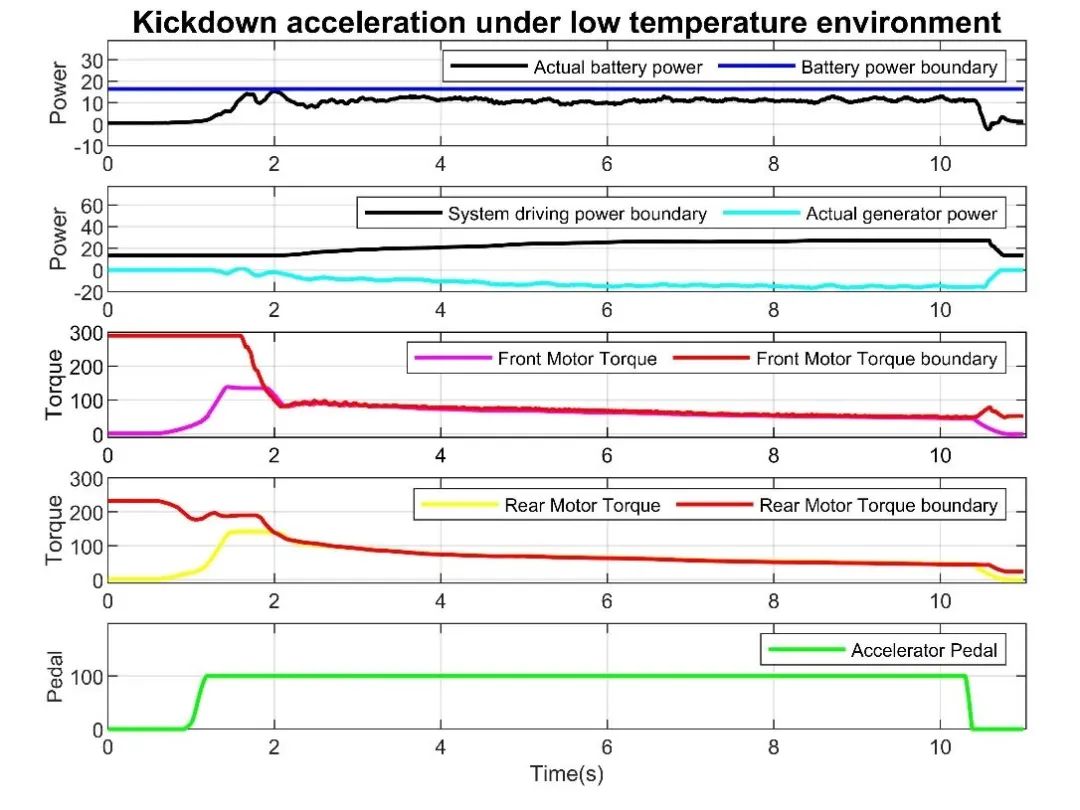
图20 低温全油门加速驾驶性实测效果
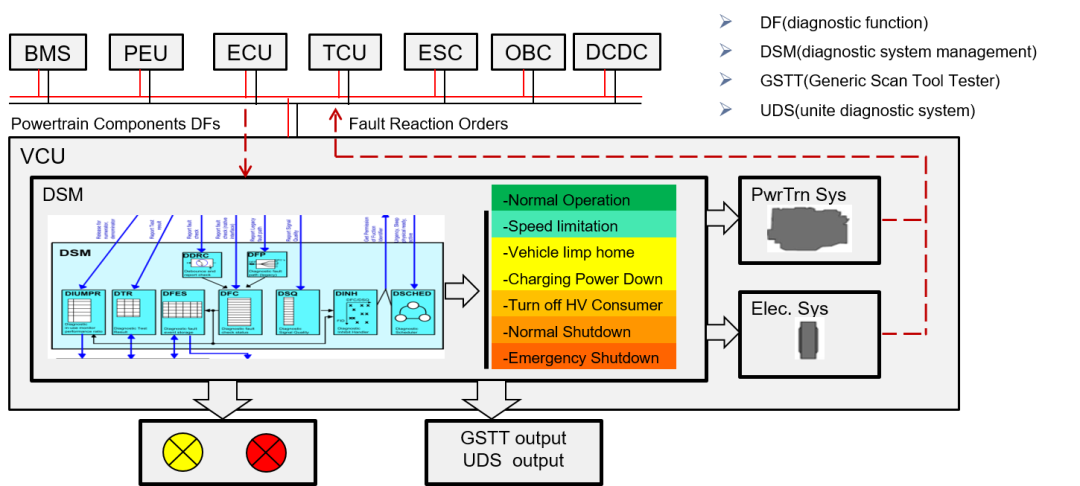
故障诊断和响应
新能源汽车的动力和高压部件比传统车多很多,车辆可能发生的故障类型和数量以及不同场景下(驻车、充电、行车等)的故障发生后的后处理的方式也很多。故障诊断的及时性、故障后处理的合理性对驾驶员的驾驶体验和车辆安全性都有很大的影响。
对客户的收益
VCU8.5整车运动域控制器平台凭借强大的性能和丰富的功能,依托本地研发团队的强力支持和快速响应,满足客户日益丰富的需求和更高的质量要求。
丰富的硬件资源,有助于客户根据项目需求进行配置扩展开发
基于整车电子电气架构发展趋势,融合动力域和部分底盘域功能,实现底盘域部分功能的冗余控制和备份
灵活的合作开发模式,支持客户化自主应用开发及第三方软件集成导入
100%本地开发和生产,快速灵活支持和响应客户
强大的功能安全和信息安全设计保障系统可靠运行
丰富的控制器生产制造经验和自动化生产率保障硬件质量
SOP后可进行FOTA备份刷新,以提升车辆性能和终端客户功能体验


码上报名
AES 2023第四届中国国际汽车以太网峰会,6月8-9日,上海