

如今,新一轮科技革命和产业革命加快演进,机器人行业赋能千行百业,是与新一代信息技术融合的结果。机器人的形态和功能也不断发生变化,改变着我们的生产和生活方式,也描摹出机器人产业的广阔前景。
每位机器人开发者都曾有“从零开发一款机器人”的梦想,唯一的区别就在于你是否付诸行动。
实践是检验真理的唯一标准,零基础也能设计开发一款智能小车,可以从理论知识开始学习。
古月居核心团队打造的《从零开发智能小车》旨在带领大家一起搭建智能小车的模型,知识体系横跨结构、电气、嵌入式、ROS、人工智能等诸多领域,快速了解机器人设计的完整路径,掌握机器人开发的核心方法。

(机器人应用开发)
此系列课程总时长6小时,共分为6大部分,从机器人整体设计入手,自底向上完成一款完整机器人的开发。
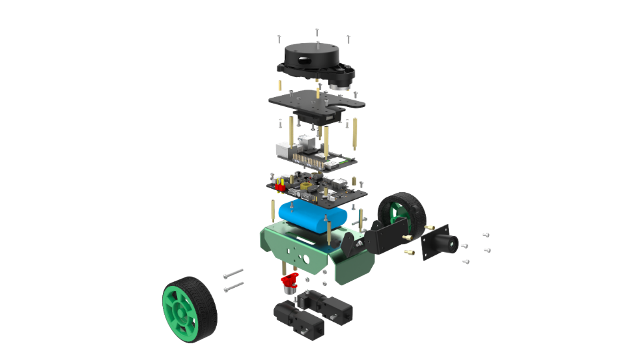
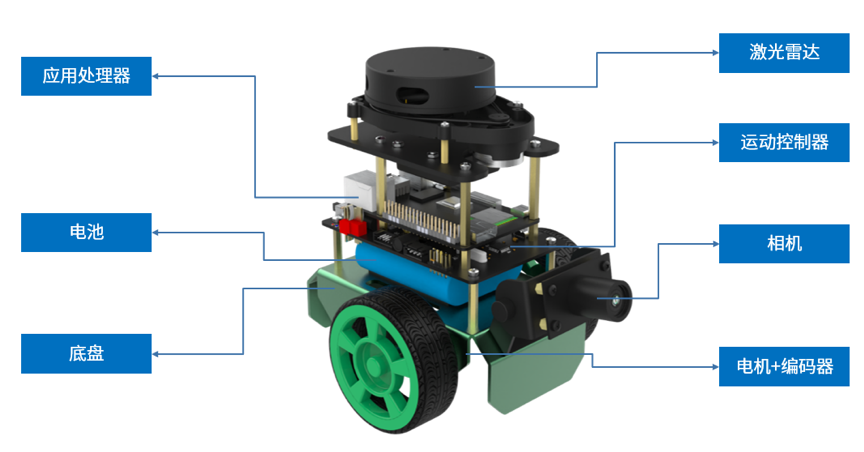
第一讲:如何设计一款智能小车
介绍机器人的组成结构,引出智能小车的设计思路,从宏观层面了解智能机器人的设计方法。
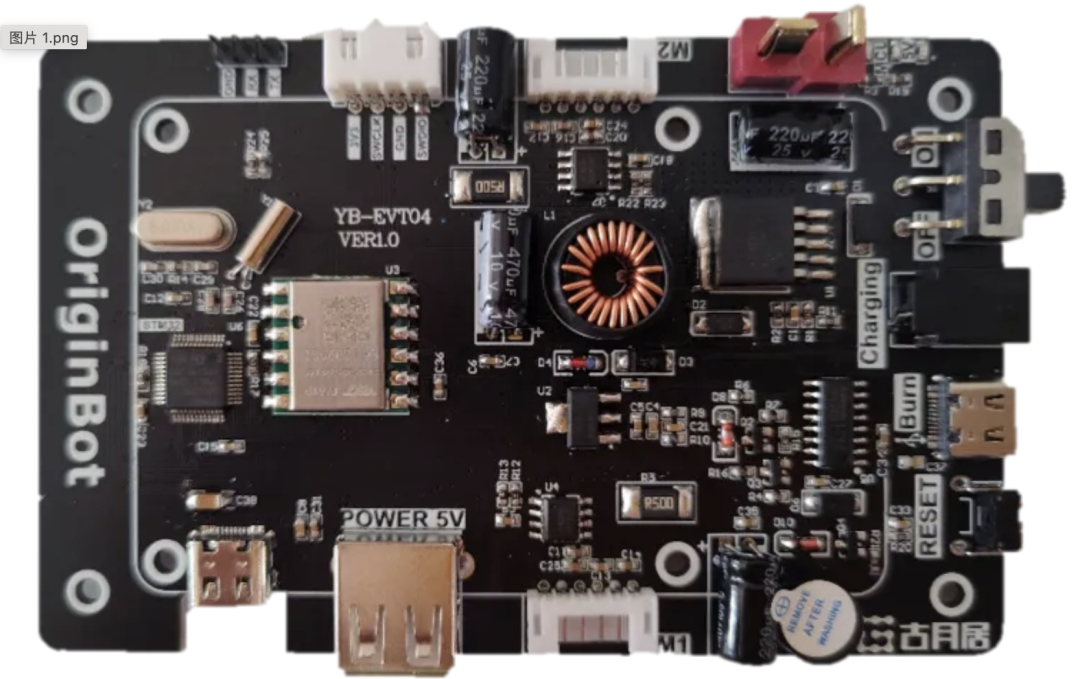
第二讲:如何实现智能小车的机电设计
介绍智能小车机电系统的电气设计方法,带领大家从原理图到PCB,再到投板生产,了解完整的设计流程。
第三讲:如何开发智能小车的控制器软件
介绍智能小车机电系统中嵌入式软件的开发方法,完成底层传感器数据的采集和电机的闭环控制
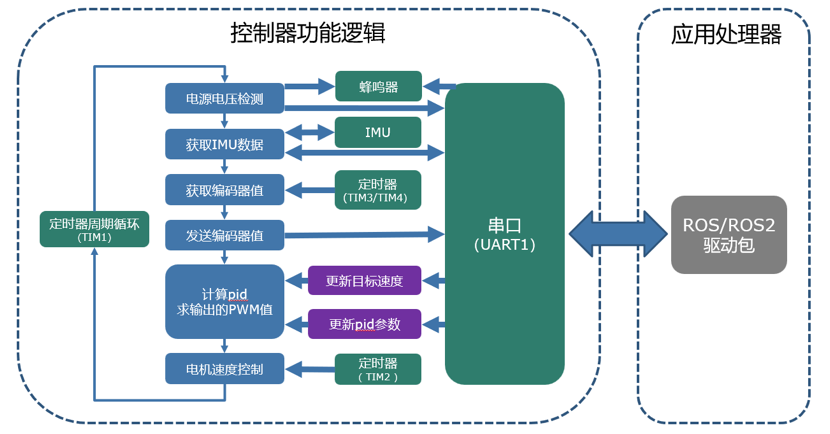
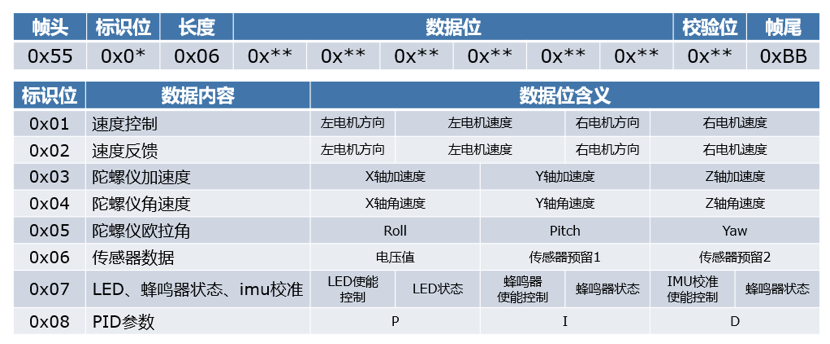
第四讲:如何实现智能小车的通信协议
介绍底层运功控制器与上层应用处理器的通信协议设计,实现基于串口的上下位机数据通信。
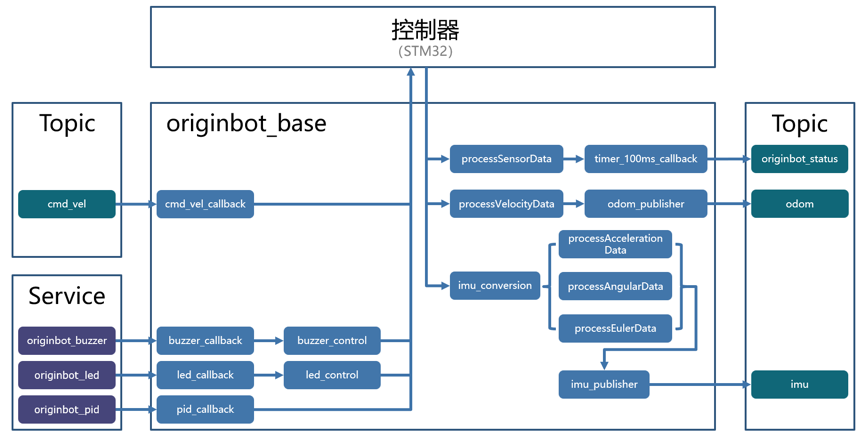
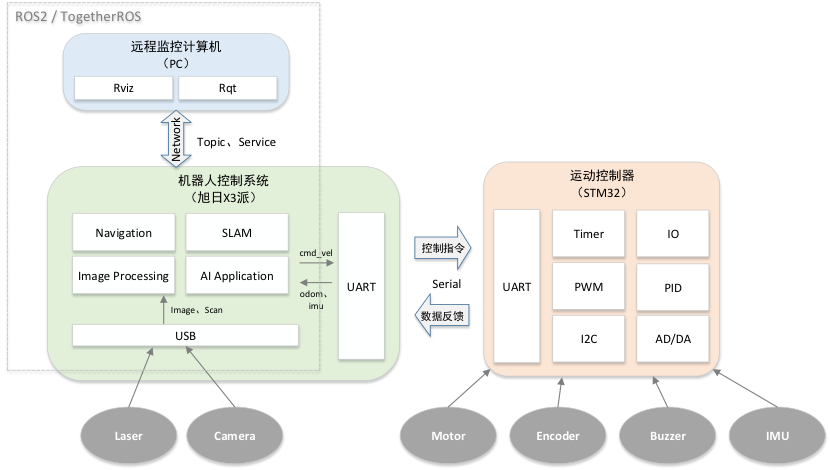
第五讲:如何构建智能小车的ROS驱动
介绍应用处理器中ROS2与TogetherROS开发环境的搭建,并且在其中实现机器人底层数据的ROS驱动。
第六讲:如何开发智能小车的应用功能
介绍ROS2与TogetherROS环境下,机器人应用的开发方法,实现SLAM、导航、视觉等相关应用功能。
课程大纲

*课程资料在微信公众号“古月居”后台回复“创客教程资料”获取
适用人群
1. 希望了解智能小车/智能机器人完整开发流程的开发者。
2. 希望学习ROS2/TogetheROS™·Bot机器人开发方法的开发者。
3. 渴望走上智能机器人开发之路的学生/工程师。
温馨提示
1. 本课程将使用ROS2作为机器人应用开发的基础环境,不会具体介绍ROS2的原理和开发方法,建议大家课前先完成《ROS2入门21讲》视频课程或ROS2入门图文教程的学习;
2. 为保证呈现效果,课程使用OriginBot开源套件作为讲解示例,关于该套件的更多资料,可以参考项目主站:www.originbot.org,大家也可以参考课程内容和开源资料,自己设计制作机器人实物;
3. 由于课程涉及到的技术较多,部分知识点难以充分讲解,会提供参考资料,供大家深入学习。
前100名享受专属粉丝福利,扫码领取。如果你想进入机器人世界,渴望走上智能机器人开发之路,那就快来学习吧!

科技的高速发展使更多的智能机器人的出现在生活里,因此也越来越多的同学选择机器人行业,为了促使大家更高效地入门学习,古月居不定时推出与机器人相关的线上视频,供大家参考!
主要涉及ROS入门、ROS进阶、规划感知、人机交互、仿真控制、机器学习、机器人学、创客教程等方向课程。

点击二维码进入【古月学院】
学习更多机器人干货!
点击阅读原文即可查看课程!
