本篇文章主要是介绍如何对GPU中的reduce算法进行优化。目前针对reduce的优化,Nvidia的官方文档reduce优化已经说得比较详细,但是过于精简,很多东西一笔而过。对于初入该领域的新人而言,理解起来还是较为费劲。因而在官方文档的基础,进行更深入地说明和讲解,尽可能地让每一个读者通过此文都能彻底地了解reduce的优化技术。
首先需要对reduce算法进行介绍。reduce算法本质上就是计算
x=x0⊗x1⊗x2⊗x3......⊗xn−1⊗xn
下面本文将详细说明如何在GPU中实现reduce算法并进行深入地优化。
在GPU中,reduce采用了一种树形的计算方式。如下图所示。
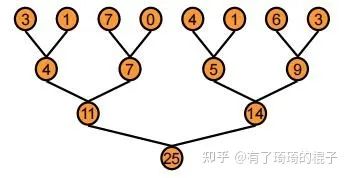
从上至下,将数据不断地累加,直到得出最后的结果,即25。但由于GPU没有针对global数据的同步操作,只能针对block的数据进行同步。所以,一般而言将reduce分为两个阶段,其示意图如下:
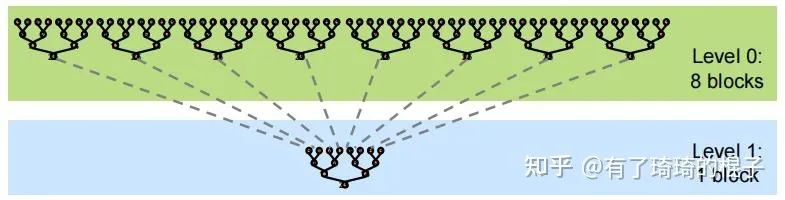
我们仔细来看看这个事,假设给定一个长度为N的数组,需要计算该数组的所有元素之和。首先需要将数组分为m个小份。而后,在第一阶段中,开启m个block计算出m个小份的reduce值。最后,在第二阶段中,使用一个block将m个小份再次进行reduce,得到最终的结果。由于第二阶段本质上是可以调用第一个阶段的kernel,所以不做单独说明,本文只是探索第一阶段的优化技巧。
所以kernel接口为:
__global__ void reduce(T *input, T* output)其中,input代表输入的数组,即一个长度为N的数组,output代表输出数组,即第一阶段的结果,即长度为M的数组。随后要开始激动人心的coding阶段,但在CUDA编程中,我们首先需要设置三个参数:
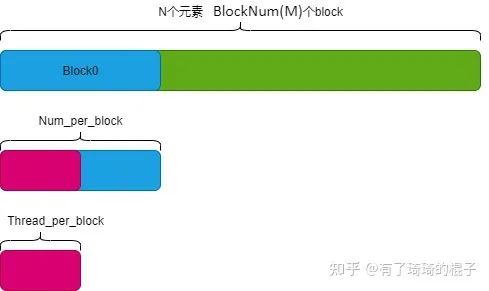
BlockNum:即开启的block数量,即上面所说的M,代表需要将数组切分为几份。
Thread_per_block:每个block中开启的线程数,一般而言,取128,256,512,1024这几个参数会比较多。
Num_per_block:每个block需要进行reduce操作的长度。
其中,BlockNum* Num_per_block=N
三个参数的示意图如下:
reduce baseline算法介绍
Baseline算法比较简单,分为三个步骤。第一个步骤是将数据load至shared memory中,第二个步骤是在shared memory中对数据进行reduce操作,第三个步骤是将最后的结果写回global memory中。代码如下:
__global__ void reduce0(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*blockDim.x+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i];
__syncthreads();
// do reduction in shared mem
for(unsigned int s=1; s if(tid%(2*s) == 0){
sdata[tid]+=sdata[tid+s];
}
__syncthreads();
}
// write result for this block to global mem
if(tid==0)d_out[blockIdx.x]=sdata[tid];
} 在进行优化之前,我们需要再来好好地梳理一下这个baseline代码。优化的本质是通过软件榨干硬件资源,所以必须清楚地了解代码在硬件上的执行过程才能更好地进行优化。因此,本节将花较多的篇幅说明代码和硬件的对应关系,为后续的优化打好基础。
在第一个步骤中,我们让Num_per_block与Thread_per_block一致,每个block设定为256个线程,一个block负责256个数据的reduce工作。假设需要处理32M的数据,则有128K个block。tid代表线程号,i代表在原始数组中的索引号。第tid号线程将第i号的数据从global中取出,放到shared memory的第tid元素中。比如在第0号block中,0号线程将0号元素取出,放到shared memory的第0号位置。示意图见:
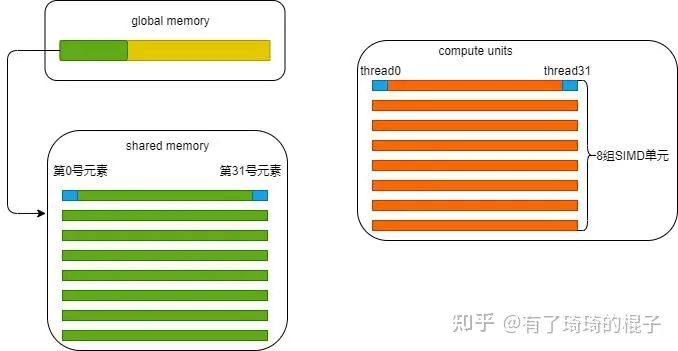
从硬件角度来分析一下代码。为了执行代码,GPU需要分配两种资源,一个是存储资源,一个是计算资源。存储资源包括在global memory中分配的一块32M
sizeof(float)的空间以及在shared memory中分配的256sizeof(float)的空间。需要注意的是,shared memory存在bank冲突的问题,因而需要格外小心。 计算资源其实是根据thread数量来确定的,一个block中分配256个thread线程,32个线程为一组,绑定在一个SIMD单元。所以256个线程可以简单地理解为分配了8组SIMD单元。(但实际的硬件资源分配不是这样,因为一个SM的计算资源有限,不可能真的给每一个block都分配这么多的SIMD单元。)总而言之,在第一个阶段,就是tid号线程将i号数据从global memory中取出,再放进shared memory中,严谨一点的话,中间是走一遍寄存器再到shared memory中的。
到了第二个阶段,block中需要计算的256个元素已经全部被存储在了shared memory中,此时需要对其进行reduce操作。这个过程需要进行多轮迭代,在第一轮迭代中,如果tid%2 ==0, 则第tid号线程将shared memory中第tid号位置的值和第tid+1号的值进行相加,而后放在第tid号位置。在第二轮迭代中,如果tid%4==0,则第tid号线程将shared memory中第tid号位置的值和第tid+2号的值进行相加,而后放在第tid号位置。不断迭代,则所有元素都将被累加到第0号位置。其示意图如下。其中,红色的线程代表符合if条件的线程,只有它们有任务,需要干活。
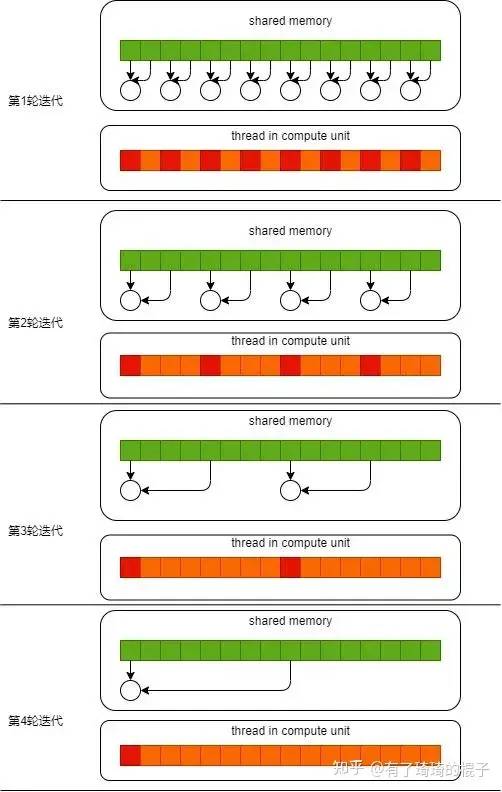
在第三个阶段中,block负责的256个元素之和都放置在shared memory的0号位置,此时,只需要将0号位置的元素写回即可。

在本次实验中,采用的GPU是V100。耗时结果是使用nsight测出来的。在V100 中global的带宽是900GB/s。可以看出,其带宽利用率较差,reduce0版本存在着较大的改进空间。
目前reduce0存在的最大问题就是warp divergent的问题。对于一个block而言,它所有的thread都是执行同一条指令。如果存在if-else这样的分支情况的话,thread会执行所有的分支。只是不满足条件的分支,所产生的结果不会记录下来。可以在上图中看到,在每一轮迭代中都会产生两个分支,分别是红色和橙色的分支。这严重影响了代码执行的效率。
解决的方式也比较明了,就是尽可能地让所有线程走到同一个分支里面。
代码示意如下:
__global__ void reduce1(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*blockDim.x+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i];
__syncthreads();
// do reduction in shared mem
for(unsigned int s=1; s int index = 2*s*tid;
if(index < blockDim.x){
sdata[index]+=sdata[index+s];
}
__syncthreads();
}
// write result for this block to global mem
if(tid==0)d_out[blockIdx.x]=sdata[tid];
} 虽然代码依旧存在着if语句,但是却与reduce0代码有所不同。我们继续假定block中存在256个thread,即拥有256/32=8个warp。当进行第1次迭代时,0-3号warp的index

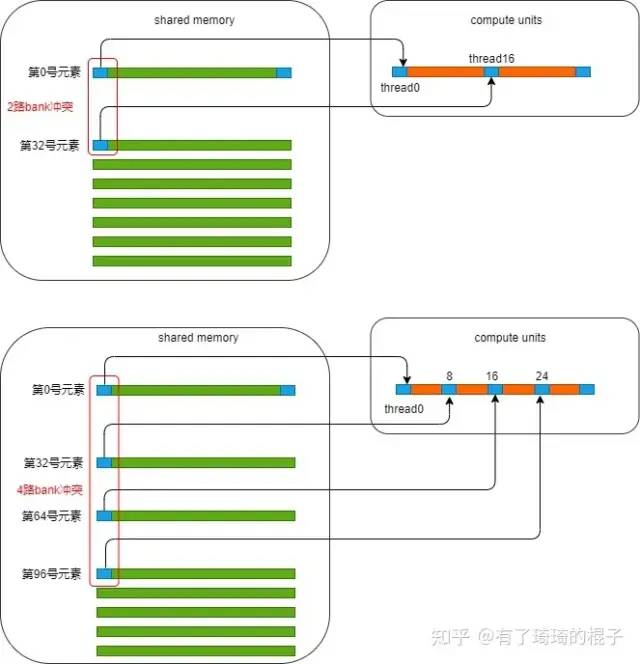
reduce1的最大问题是bank冲突。我们把目光聚焦在这个for循环中。并且只聚焦在0号warp。在第一次迭代中,0号线程需要去load shared memory的0号地址以及1号地址的数,然后写回到0号地址。而此时,这个warp中的16号线程,需要去load shared memory中的32号地址和33号地址。可以发现,0号地址跟32号地址产生了2路的bank冲突。在第2次迭代中,0号线程需要去load shared memory中的0号地址和2号地址。这个warp中的8号线程需要load shared memory中的32号地址以及34号地址,16号线程需要load shared memory中的64号地址和68号地址,24号线程需要load shared memory中的96号地址和100号地址。又因为0、32、64、96号地址对应着同一个bank,所以此时产生了4路的bank冲突。现在,可以继续算下去,8路bank冲突,16路bank冲突。由于bank冲突,所以reduce1性能受限。下图说明了在load第一个数据时所产生的bank冲突。
在reduce中,解决bank冲突的方式就是把for循环逆着来。原来stride从0到256,现在stride从128到0。其伪代码如下:
__global__ void reduce2(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*blockDim.x+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i];
__syncthreads();
// do reduction in shared mem
for(unsigned int s=blockDim.x/2; s>0; s>>=1){
if(tid < s){
sdata[tid]+=sdata[tid+s];
}
__syncthreads();
}
// write result for this block to global mem
if(tid==0)d_out[blockIdx.x]=sdata[tid];
}那为什么通过这么一个小小的改变就能消除bank冲突呢,我们继续进行分析。
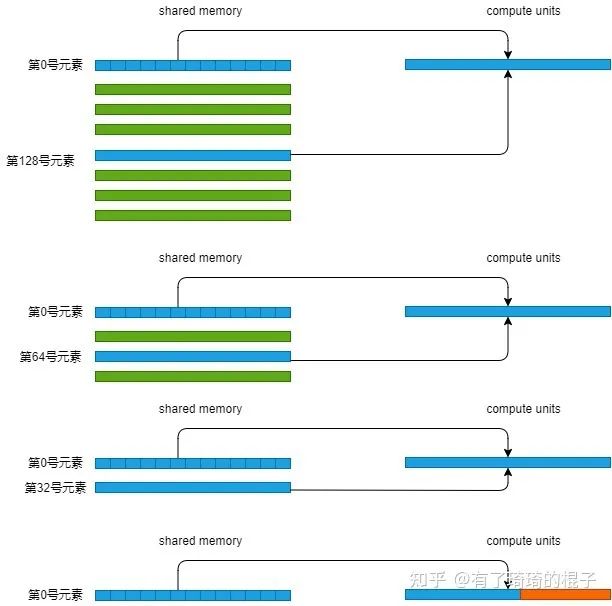
把目光继续看到这个for循环中,并且只分析0号warp。0号线程需要load shared memory的0号元素以及128号元素。1号线程需要load shared memory中的1号元素和129号元素。这一轮迭代中,在读取第一个数时,warp中的32个线程刚好load 一行shared memory数据。再分析第2轮迭代,0号线程load 0号元素和64号元素,1号线程load 1号元素和65号元素。咦,也是这样,每次load shared memory的一行。再来分析第3轮迭代,0号线程load 0号元素和32号元素,接下来不写了,总之,一个warp load shared memory的一行。没有bank冲突。到了4轮迭代,0号线程load 0号元素和16号元素。那16号线程呢,16号线程啥也不干,因为s=16,16-31号线程啥也不干,跳过去了。示意图如下:

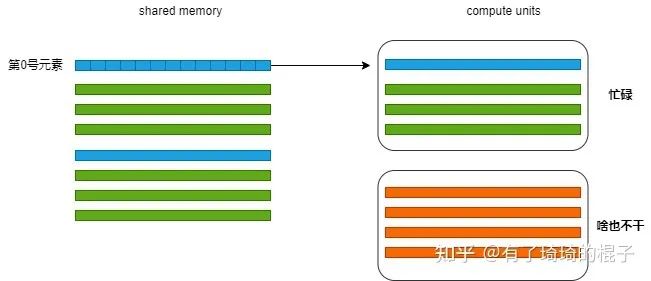
reduce2最大的问题就是线程的浪费。可以看到我们启动了256个线程,但是在第1轮迭代时只有128个线程在干活,第2轮迭代只有64个线程在干活,每次干活的线程都会减少一半。第一轮迭代示意图如下,只有前128个线程在load数据。后128个线程啥也不干,光看着。
解决方式
对于HPC从业者而言,我们希望变成GPU的资本家,去尽可能地压榨GPU。但是呢,在这里,每一次迭代有一半的线程不干活。而且,128-255号线程最过分,它娘的,没有任何贡献,啥也不干。想来想去,能不能让它们干点活呢。想来想去,那这样吧,让它好歹做一次加法。除了去global memory中取数外,再做一次加法。当然为了实现这个,block数就得改一改了。Block数量减少,Num_per_block增加一倍。也就是说原来一个block只需要管256个数就行,现在得管512个数了。代码如下:
__global__ void reduce3(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*(blockDim.x*2)+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i] + d_in[i+blockDim.x];
__syncthreads();
// do reduction in shared mem
for(unsigned int s=blockDim.x/2; s>0; s>>=1){
if(tid < s){
sdata[tid]+=sdata[tid+s];
}
__syncthreads();
}
// write result for this block to global mem
if(tid==0)d_out[blockIdx.x]=sdata[tid];
}通过这种方式,将一些idle的线程给利用起来了。

这里面多说一句,让idle线程利用起来的这个加速比其实有点出乎意料。
对于reduce3来说,性能已经算是比较好了。但是依旧没有达到我们想要的效果。我们再来仔细地看看还有什么可以改进的地方。我们发现,当进行到最后几轮迭代时,此时的block中只有warp0在干活时,线程还在进行同步操作。这一条语句造成了极大的浪费。
由于一个warp中的32个线程其实是在一个SIMD单元上,这32个线程每次都是执行同一条指令,这天然地保持了同步状态,因而当s=32时,即只有一个SIMD单元在工作时,完全可以将__syncthreads()这条同步代码去掉。所以我们将最后一维进行展开以减少同步。伪代码如下:
__device__ void warpReduce(volatile float* cache,int tid){
cache[tid]+=cache[tid+32];
cache[tid]+=cache[tid+16];
cache[tid]+=cache[tid+8];
cache[tid]+=cache[tid+4];
cache[tid]+=cache[tid+2];
cache[tid]+=cache[tid+1];
}
__global__ void reduce4(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*(blockDim.x*2)+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i] + d_in[i+blockDim.x];
__syncthreads();
// do reduction in shared mem
for(unsigned int s=blockDim.x/2; s>32; s>>=1){
if(tid < s){
sdata[tid]+=sdata[tid+s];
}
__syncthreads();
}
// write result for this block to global mem
if(tid<32)warpReduce(sdata,tid);
if(tid==0)d_out[blockIdx.x]=sdata[tid];
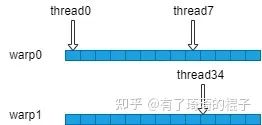
}可以通过下面的示意图更好地了解,(图画的有点丑,比例也不太对,大家将就着看看。)warp0会被绑定在一个SIMD单元上,上面有thread0-thread31。warp1会被绑在另外一个SIMD单元上,上面有thread32-thread63。由于在一个SIMD单元上,然后不管啥时候thread0和thread7肯定是同一状态,不需要同步。而thread0和thread34就不能保证同步,必须用__syncthreads()来保证同步操作。
实验结果

在做到这一步时,带宽已经到了756GB/s。这个时候就已经优化地差不多了。性能也很难做到有效提升了。
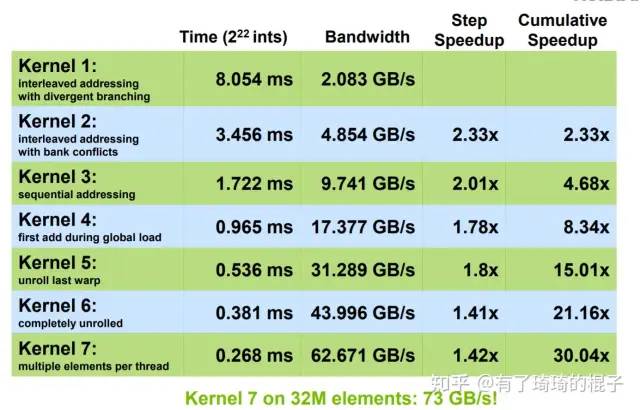
其实到了这一步,reduce的效率已经足够高了。再进一步优化其实已经非常困难了。为了探索极致的性能表现,Mharris接下来给出的办法是对for循环进行完全展开。我觉得这里主要是减少for循环的开销。Mharris的实验表明这种方式有着1.41x的加速比。但是用的机器是G80,十几年前的卡。性能数据也比较老了,至于能不能真的有这么好的加速比,我们拭目以待。
我们将整个for循环进行展开,非常暴力,代码如下:
template
__device__ void warpReduce(volatile float* cache,int tid){
if(blockSize >= 64)cache[tid]+=cache[tid+32];
if(blockSize >= 32)cache[tid]+=cache[tid+16];
if(blockSize >= 16)cache[tid]+=cache[tid+8];
if(blockSize >= 8)cache[tid]+=cache[tid+4];
if(blockSize >= 4)cache[tid]+=cache[tid+2];
if(blockSize >= 2)cache[tid]+=cache[tid+1];
}
template
__global__ void reduce5(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*(blockDim.x*2)+threadIdx.x;
unsigned int tid=threadIdx.x;
sdata[tid]=d_in[i] + d_in[i+blockDim.x];
__syncthreads();
// do reduction in shared mem
if(blockSize>=512){
if(tid<256){
sdata[tid]+=sdata[tid+256];
}
__syncthreads();
}
if(blockSize>=256){
if(tid<128){
sdata[tid]+=sdata[tid+128];
}
__syncthreads();
}
if(blockSize>=128){
if(tid<64){
sdata[tid]+=sdata[tid+64];
}
__syncthreads();
}
// write result for this block to global mem
if(tid<32)warpReduce(sdata,tid);
if(tid==0)d_out[blockIdx.x]=sdata[tid];
} 
可以看到,还是有所收益,但是并没有那么地显著。这主要是因为GPU硬件架构的不断发展,以及NV在编译器上面也做了较多的工作。
当走到这一步的时候,能调的东西已经基本上调完了。我们再把眼光放在block和thread的设置上。之前默认了Num_per_block=Thread_per_block。也就是说,一个block开启256个线程时,这个block负责256个元素的reduce操作。那可不可以让一个block多管点数。这样的话,开启的block数量少一些。以此对block设置进行调整,获得最优block取值,这样或许能够带来一些性能收益?
这样需要再思考一下block的取值。对于GPU而言,block的取值到底是多更好,还是少更好。如此对CUDA编程熟悉的同学,肯定会毫不犹豫地说:“那肯定是多更好啦。Block数量多,block可以进行快速地切换,去掩盖访存的延时。”这个问题按下不表,我们看看Mharris是怎么说的。
如果一个线程被分配更多的work时,可能会更好地覆盖延时。这一点比较好理解。如果线程有更多的work时,对于编译器而言,就可能有更多的机会对相关指令进行重排,从而去覆盖访存时的巨大延时。虽然这句话并没有很好地说明在某种程度上而言,block少一些会更好。但是,有一点不可否认,block需要进行合理地设置。唠唠叨叨说了很多,现在把代码贴一下:
template
__global__ void reduce6(float *d_in,float *d_out){
__shared__ float sdata[THREAD_PER_BLOCK];
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*(blockDim.x*2)+threadIdx.x;
unsigned int tid=threadIdx.x;
unsigned int gridSize = blockSize * 2 * gridDim.x;
sdata[tid] = 0;
while(i sdata[tid] +=d_in[i]+d_in[i+blockSize];
i+=gridSize;
}
__syncthreads();
// do reduction in shared mem
if(blockSize>=512){
if(tid<256){
sdata[tid]+=sdata[tid+256];
}
__syncthreads();
}
if(blockSize>=256){
if(tid<128){
sdata[tid]+=sdata[tid+128];
}
__syncthreads();
}
if(blockSize>=128){
if(tid<64){
sdata[tid]+=sdata[tid+64];
}
__syncthreads();
}
// write result for this block to global mem
if(tid<32)warpReduce(sdata,tid);
if(tid==0)d_out[blockIdx.x]=sdata[tid];
} 
对于block的取值,我进行了微调,大概取2048会比512,1024,4096的效果要好。理论上来说,这个值取SM数量的倍数会比较合理。但是V100的SM是80,取一个完美的倍数还是比较困难。目前达到了768GB/s。
其实,对于Mharris的讲义。reduce优化就到此结束了。但是NV后来出了Shuffle指令,对于reduce优化有着非常好的效果。目前绝大多数访存类算子,像是softmax,batch_norm,reduce等,都是用Shuffle实现。所以,在这里谈一下这么把shuffle指令用在reduce优化上。
Shuffle指令是一组针对warp的指令。Shuffle指令最重要的特性就是warp内的寄存器可以相互访问。在没有shuffle指令的时候,各个线程在进行通信时只能通过shared memory来访问彼此的寄存器。而采用了shuffle指令之后,warp内的线程可以直接对其他线程的寄存器进行访存。通过这种方式可以减少访存的延时。除此之外,带来的最大好处就是可编程性提高了,在某些场景下,就不用shared memory了。毕竟,开发者要自己去控制 shared memory还是挺麻烦的一个事。
伪代码如下:
template
__device__ __forceinline__ float warpReduceSum(float sum){
if(blockSize >= 32)sum += __shfl_down_sync(0xffffffff,sum,16);
if(blockSize >= 16)sum += __shfl_down_sync(0xffffffff,sum,8);
if(blockSize >= 8)sum += __shfl_down_sync(0xffffffff,sum,4);
if(blockSize >= 4)sum += __shfl_down_sync(0xffffffff,sum,2);
if(blockSize >= 2)sum += __shfl_down_sync(0xffffffff,sum,1);
return sum;
}
template
__global__ void reduce7(float *d_in,float *d_out, unsigned int n){
float sum = 0;
//each thread loads one element from global memory to shared mem
unsigned int i=blockIdx.x*(blockDim.x*2)+threadIdx.x;
unsigned int tid=threadIdx.x;
unsigned int gridSize = blockSize * 2 * gridDim.x;
while(i sdata[tid] +=d_in[i]+d_in[i+blockSize];
i+=gridSize;
}
// shared mem for partial sums(one per warp in the block
static __shared__ float warpLevelSums[WARP_SIZE];
const int laneId = threadIdx.x % WARP_SIZE;
const int warpId = threadIdx.x / WARP_SIZE;
sum = warpReduceSum(sum);
if(laneId == 0)warpLevelSums[warpId]=sum;
__syncthreads();
sum = (threadIdx.x < blockDim.x / WARP_SIZE)? warpLevelSums[laneId]:0;
// Final reduce using first warp
if(warpId == 0)sum = warpReduceSum(sum);
// write result for this block to global mem
if(tid==0)d_out[blockIdx.x]=sum;
} 
通过上次一系列的优化技巧,我们对reduce进行了不断地优化。最后效果是770.3GB/s。带宽利用达到85%。PS:具体的reduce性能数据还需要大量测试,但由于我比较懒。所以测试工作就到此为此,大家有兴趣可以自己再跑跑。代码在这里,还有点乱,没怎么整理,大家有疑问可以直接评论或者私信我。
然后不同的优化技巧所带来的性能表现如下:
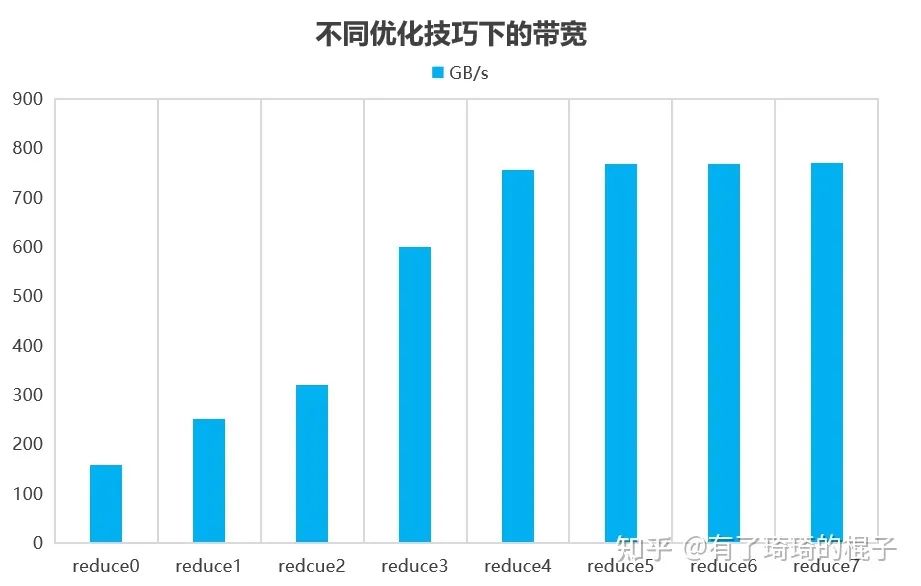
可以看到,其实在reduce4的时候就已经很难再提升了。而且这个数据跟NV在博客上的数据还是有比较大的出入,主要是对最后一维展开后,在V100上的带宽利用率就很难再提升了,而G80还有显著的提升。我觉得主要原因是硬件已经更新了好几代。
总而言之,我们通过这一系列的优化已经可以把reduce优化到一个非常好的程度。我之前测过一次是160us,十分接近800GB/s。但不知道为啥就不能复现了。对于访存型的算子,在V100上能做到接近800GB/s的带宽就已经接近极限了。而目前能够做的优化,也都列了出来。
 编者按:前段时间分享倚天ARM优化师提到矩阵运算优化(文章链接:https://mp.weixincom/s/-B4fDx-mVs-47fESeSEtMg ),有小伙伴希望更多转一转相关的算法优化文章。这次给大家带来GPU优化系列文章。本次是第一篇。文章先讲了原理,给出基线性能,然后逐步讲解优化。文中提到的Mharris的文档见文章最后的链接。(https://developer.download.nvidia.com/assets/cuda/files/reduction.pdf)
编者按:前段时间分享倚天ARM优化师提到矩阵运算优化(文章链接:https://mp.weixincom/s/-B4fDx-mVs-47fESeSEtMg ),有小伙伴希望更多转一转相关的算法优化文章。这次给大家带来GPU优化系列文章。本次是第一篇。文章先讲了原理,给出基线性能,然后逐步讲解优化。文中提到的Mharris的文档见文章最后的链接。(https://developer.download.nvidia.com/assets/cuda/files/reduction.pdf)

