--关注、星标、回复“26262”--
↓↓领取:ISO 26262↓↓






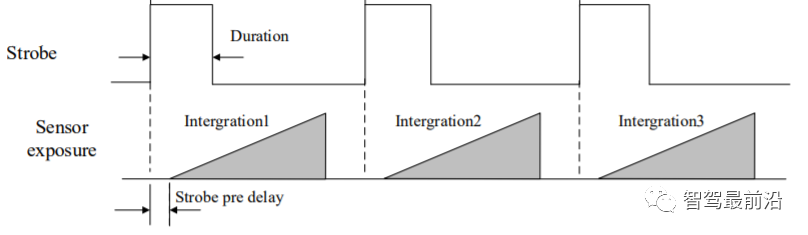
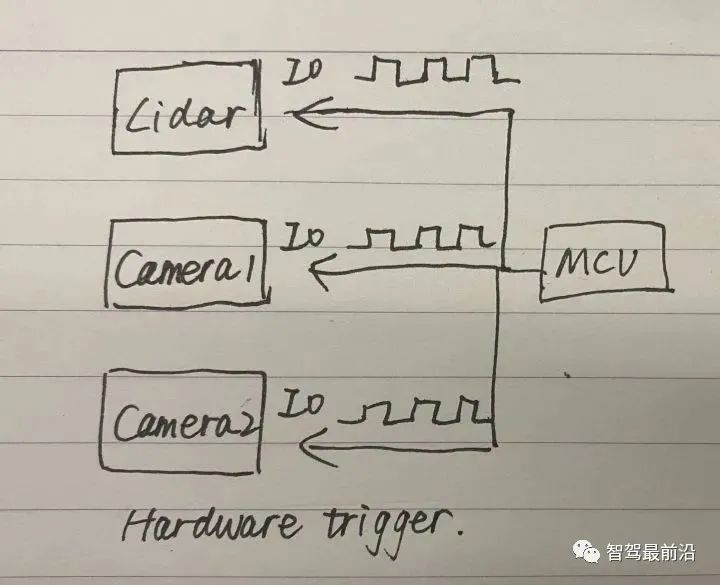
配置该模式时注意四点:
上升沿 or 下降沿的触发方式;
有效电平宽度,电平幅值,你要知道能触发 Lidar 的最低幅值;
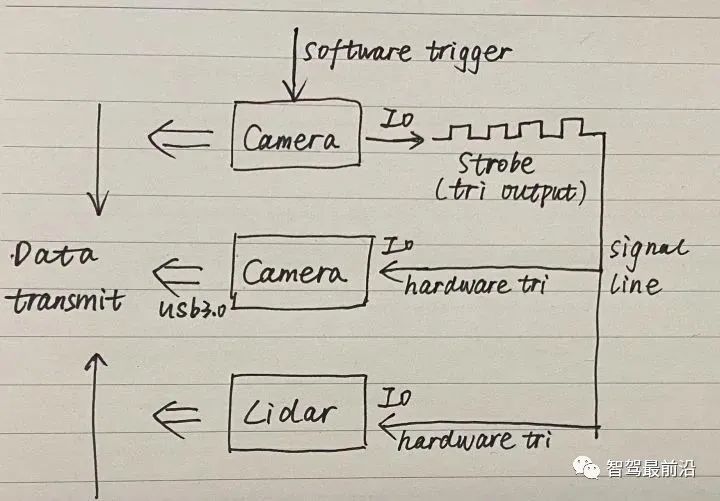
Strobe 预输出;
两边电平信号是否一样,3v or 5v 是否需要升压;
最后讲讲不被推荐的软触发。
//读取lidar和image数据的线程1while(1){API(1); //软触发第一个sensorAPI(2); //软触发第二个sensor//假设脉冲周期为0.5s}//处理数据线程2for(i=0;i{t1 = getTickCount();//部分程序有互斥锁t2 = getTickCount();Time = (t2 - t1) / getTickFrequency(); //当前帧处理时间sleep(1/fps-Time);}
如上图示意,如果处理单帧数据的时间超过0.5s,线程1就会读到下一帧数据,就会导致线程2数据混乱。因此线程2单帧处理时间需要小于0.5s,且每帧需要等待(1/fps-当前帧处理时间)。
转载自计算机视觉life,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --

