由于MCU内部资源限制,在应用中会出现UART接口不够用的情况,如果UART使用的波特率不太高,而且系统中的负荷不是很大的情况就可以使用端口来模拟UART的收发,下文是一个在R5F100LE(RL78)上的具体的实现方法,这里略去工程的建立过程,相应的驱动程序细节可以参考代码生成器生成的代码,这里只重点讲述代码生成器配置和软件UART的实现。
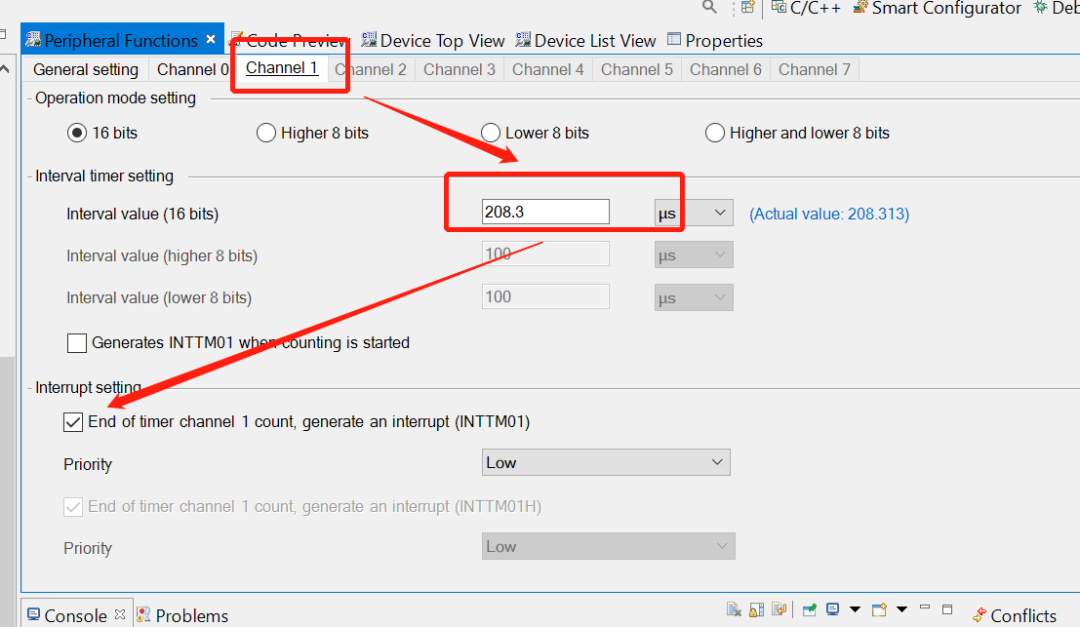
将接收定时器的定时间隔初始化为1位数据的时长的一半,比如波特率2400,1位为416.6us,那么定时器设置为416.6us/2=208.3us,在这里我们使用了Timer的Channel 1

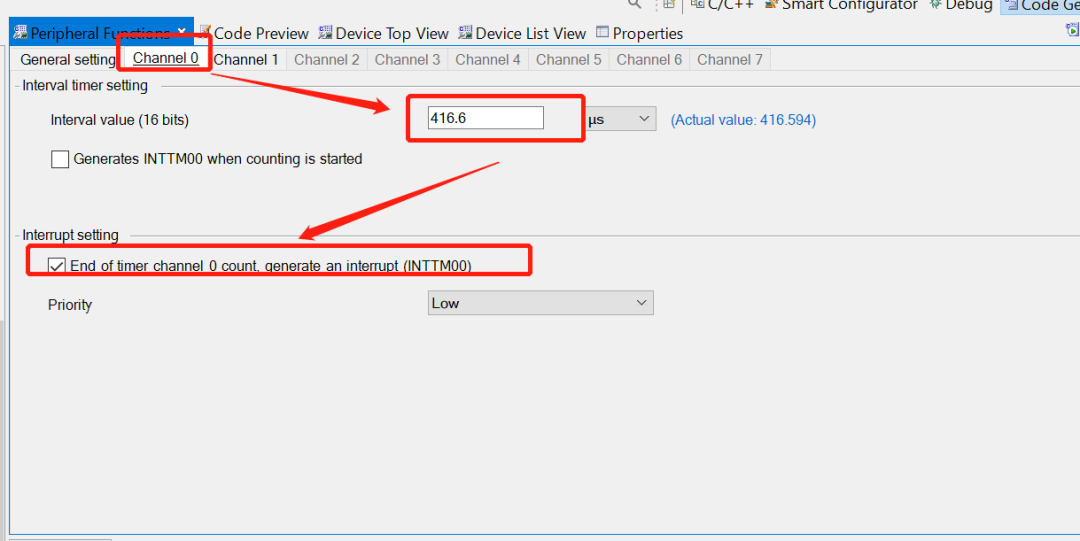
将发送定时器的定时间隔设置为1位数据时长,比如波特率2400,1位为416.6us,那么定时器设置为416.6us,在这里我们使用Timer的Channel 0。
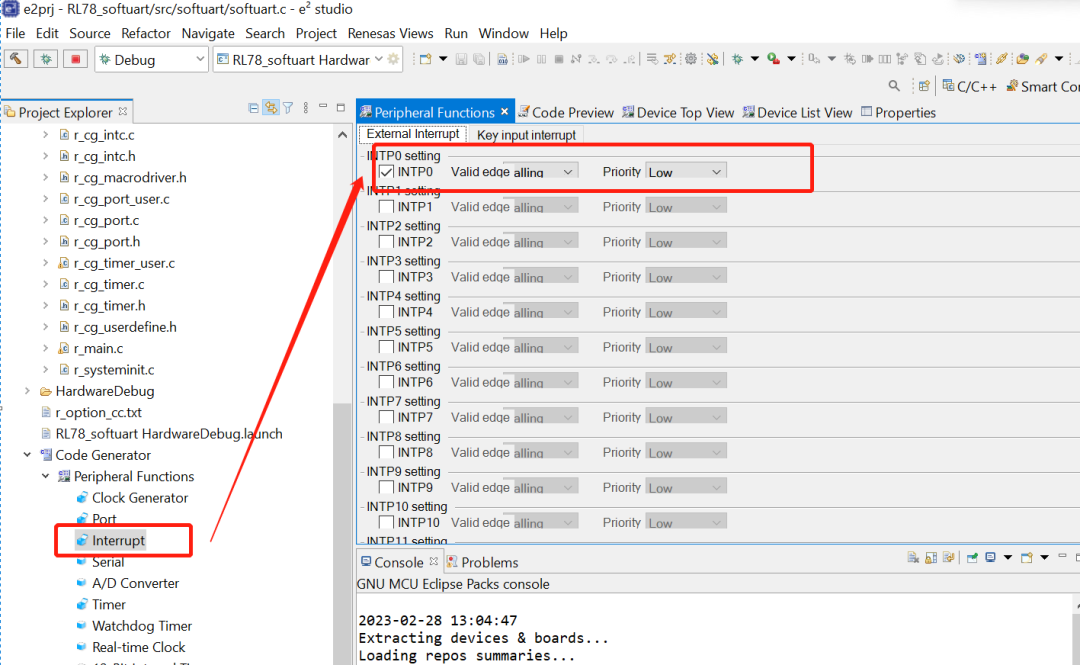
接收时我们需要写两个中断函数,在中断里完成数据的接收,接收完毕后设置一个标志,在主循环中根据标志来判断数据是否接收完毕。初始化时需要打开边沿中断,关闭定时器中断。
1)边沿中断函数处理
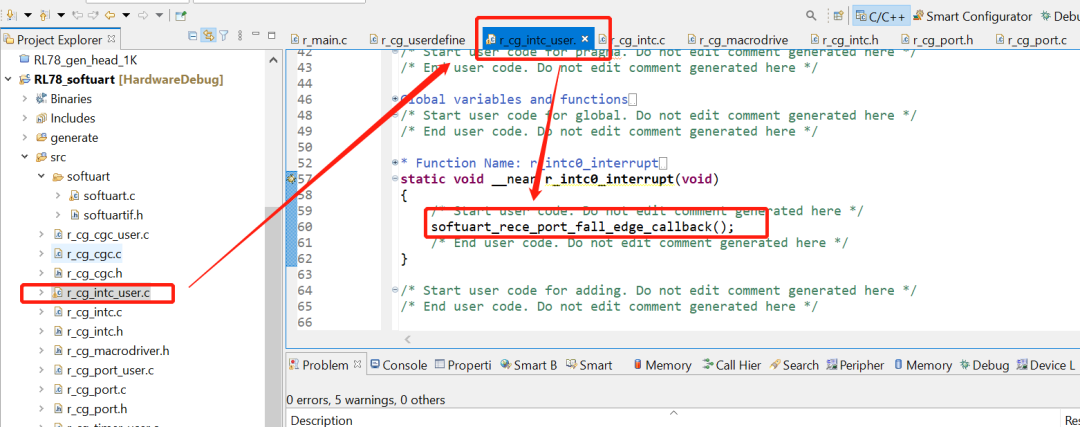
当下降沿中断到来时,在边沿中断函数里启动接收定时器,关闭边沿中断。具体程序如下:
void softuart_rece_port_fall_edge_callback(void){softuart_rece_state = 0;//接收定时器进入次数计数清零uart_port_intp_stop();// 关闭边沿中断start_uart_rece_timer();//打开接收定时器中断}
这个函数放到r_cg_intc_user.c内
2)接收定时器中断函数
每奇数次进入中断时(第1,3,5…)进行RXD端口的采样并保存数据,同时根据我们的要求进行移位操作(比如LSB或MSB,数据长度是几位),在偶数次进入中断时就直接退出,当数据接收完成后设置标志,同时关闭接收定时器中断,打开边沿中断中断,具体程序如下,这里我是用的8位数据长度和1个停止位:
void softuart_rece_timer_callback(void){static __saddr uint8_t uartrece_shift_reg;softuart_rece_state++;//进入次数++if(softuart_rece_state==1)//接收start位{//check start bitif(1==get_uart_rece_port()){//start bit erroruartrece_shift_reg = 0;stop_uart_rece_timer();uart_port_intp_start();}}else if (softuart_rece_state<=17)//接收8位数据位{//receive data sampling point 3,5,7,9,11,13,15,17if(0==(softuart_rece_state&1)) return;uartrece_shift_reg >>= 1;if(1==get_uart_rece_port()){uartrece_shift_reg |= 0x80;}}else if(softuart_rece_state>=19)//接收停止位{//stop bit sample sampling point 19stop_uart_rece_timer();//关闭接收定时器uart_port_intp_start();//打开下降沿中断if(uartrece_end_fg ==0){uartrece_data = uartrece_shift_reg;uartrece_end_fg =1;//设置接收完毕标志}}}
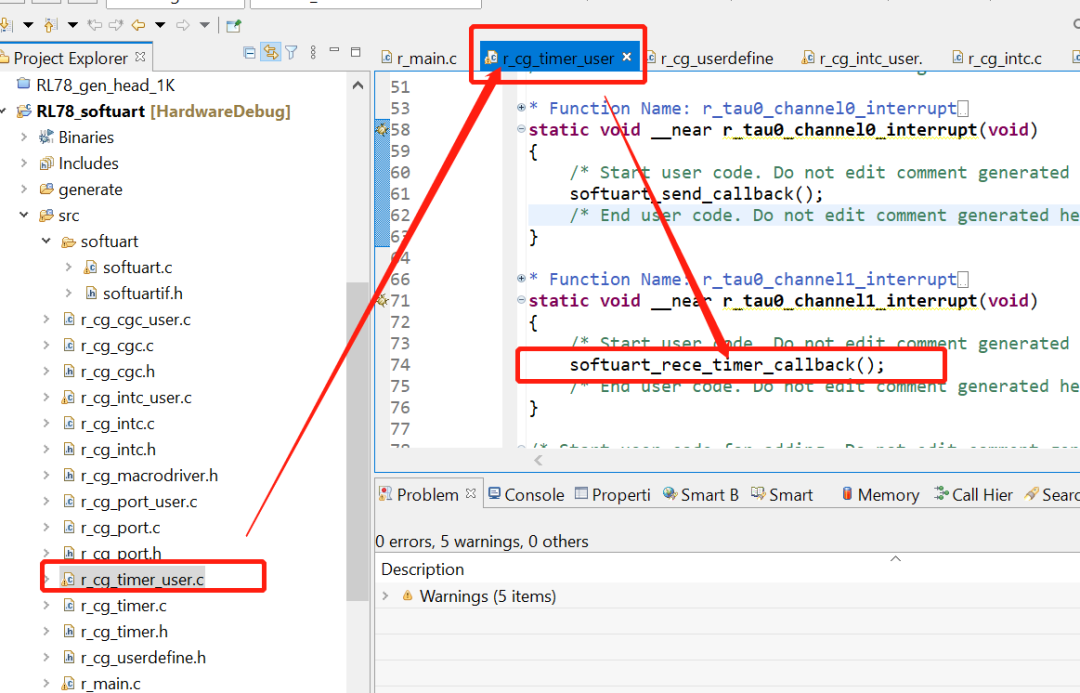
这个程序要放到r_cg_timer_user.c内
3)在主循环里调用如下函数来判断是否收到数据
uint8_t get_softuart_rece(uint8_t * buff){if(uartrece_end_fg==1){uartrece_end_fg =0;*buff = uartrece_data;//将数据放入接收缓冲区return 1;//说明收到数据}return 0;}
发送时需要写一个发送定时器中断函数,在中断里完成数据发送,发送完成后设置一个标志,在主循环中判断,初始化时需要关闭发送定时器,中断的代码如下:
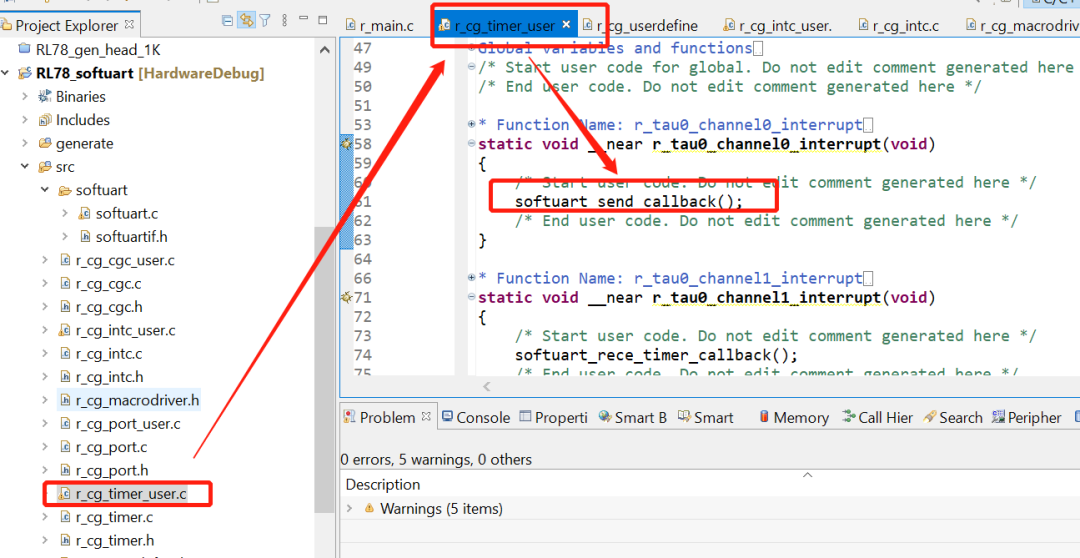
void softuart_send_callback(void){softuart_send_state++;if(softuart_send_state==10)//发送停止位{//sampling point 10 stop bitsoftuart_send_port_h();}else if(softuart_send_state>10)//等待停止位发送完毕{//>11 stop bit send finishedsoftuart_send_state=0;stop_uart_send_timer();}else//发送数据{//samplimng point 2,3,4,5,6,7,8,9if(0!=(uartsend_shift_reg&1)){softuart_send_port_h();}else{softuart_send_port_l();}uartsend_shift_reg >>= 1;}}
这个程序要放到r_cg_timer_user.c内
当需要发送时,先将发送端口设置为低电平,然后开启发送定时器,如果正在发送返回发送错误。具体的操作代码如下:
uint8_t softuart_send(uint8_t data){if(softuart_send_state!=0)return 0;//数据没有发送完毕softuart_send_state = 1;DI();softuart_send_port_l(); //发送起始位uartsend_shift_reg=data;//将要发送的数据放到移位寄存器start_uart_send_timer();//启动UART发送定时器EI();return 1;}
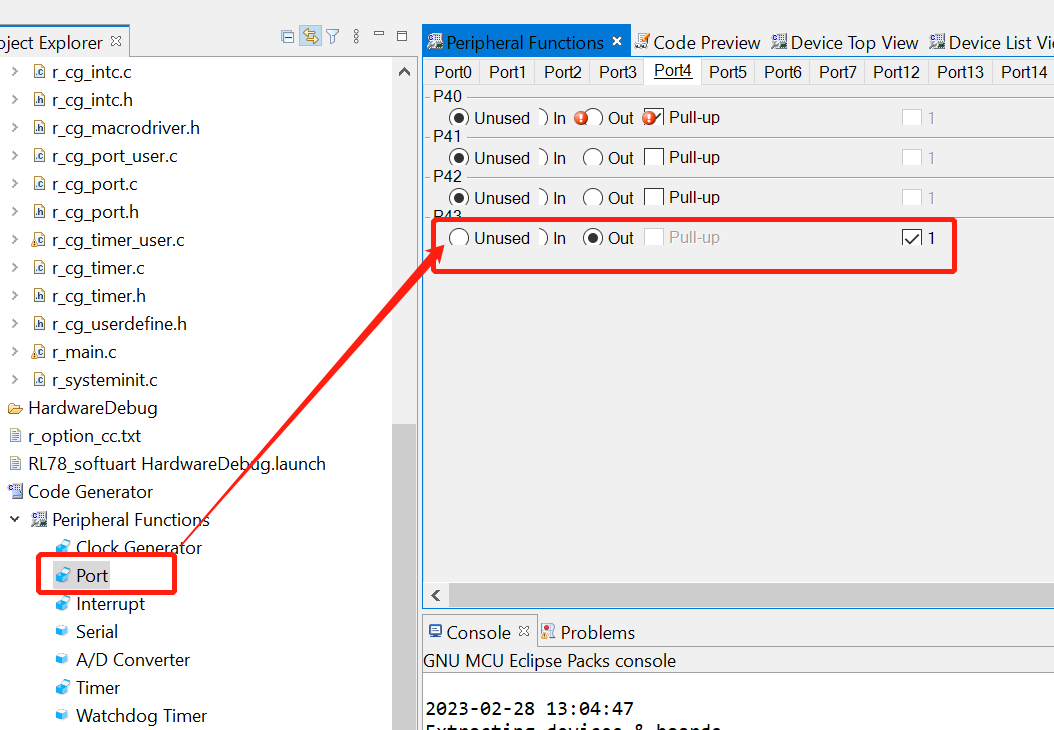
由于相应硬件的初始化程序在R_Systeminit已经调用过了,所以我们只用调用启动程序就行了,为了方便程序的修改,用宏定义重新定义了接口部分。
如果想要修改使用的硬件资源只用修改宏定义即可。
在使用软件UART之前需要先调用一下如下初始化函数。
void softuart_int(void){stop_uart_send_timer();//停止发送定时器stop_uart_rece_timer();//停止接收定时器uart_port_intp_stop(); // 边沿中断接收停止softuart_send_port_h(); // TXD端口设置为高uart_port_intp_start(); // 允许RXD端口的下降沿中断softuart_send_state = 0;softuart_rece_state = 0;uartrece_end_fg = 0;}
1)使用上述方法就可以实现一个软件的UART操作,但是使用过程中不能有长时间的关闭中断操作,如果有的话会影响程序的执行。
2)如果通讯波特率发生变化需要修改定时器的定时值。
1
END
1
推荐阅读
使用QE和CS+调试触摸按键
新品开箱 | RL78/G15开发板开箱与开发环境搭建
RL78系列MCU Data Flash使用介绍