一、传输速率与距离
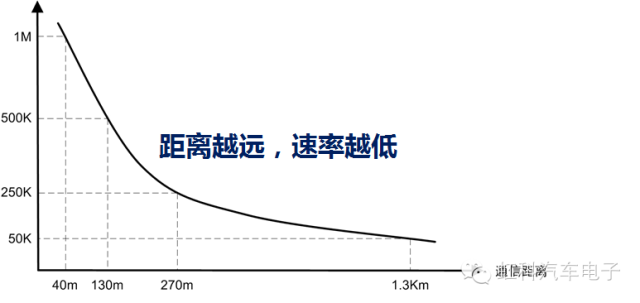
CAN——Control Area Network 的缩写,小范围实时通信网络,通信距离与速率成反比。如下图所示,横轴为通信距离,竖轴为通信速率,距离越远,速率越低。
注:当通信距离太长时可以使用CAN 网关或网桥等设备划分子网,使子网通信速率与距离在规定范围内。
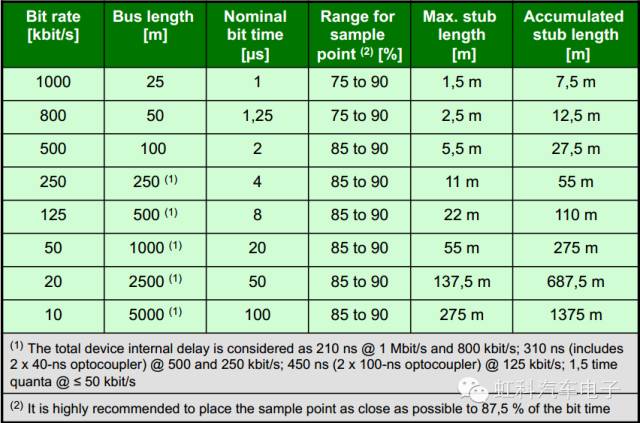
下表是关于通信速率、总线长度与支线长度的关系,表中数值为CiA组织的建议值。这些推荐值能够保证通信的稳定性和可靠性。
二、终端电阻与连接器
根据电磁场和微波理论,高频电路中负载阻抗需与传输线的特性阻抗一致,否则电信号在线束终端遭遇阻抗突变,发生反射现象,造成波形震荡。反射信号叠加到原信号上,会改变原波形的形状。极有可能出现总线错误:将显性读成隐性,或隐性读成显性。
我们都知道光从空气进入水中的时候光的线路会发生变化,那是因为光从一种介质进入另一种介质时,光会发生反射,从而改变了原来的光路。同理,由于电信号在阻抗不连续、阻抗不匹配的线路中传播会导致信号的反射,就会产生信号串扰、消息丢失、总线紊乱这一系列的问题。
那么信号反射这个问题该如何解决呢?
终端电阻可以用于减少通信线路上的反射,避免引起电平变化而导致数据的传输错误。
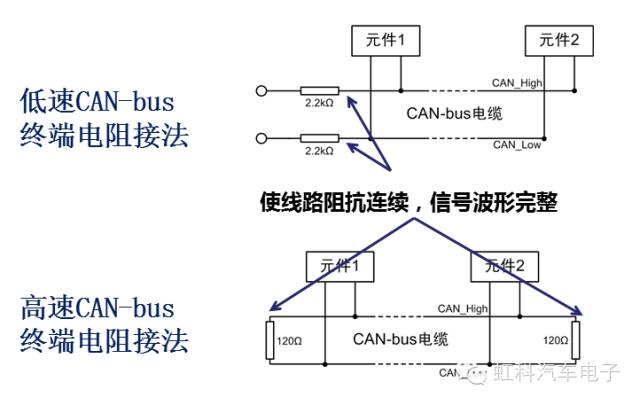
高速CAN与低速CAN终端电阻接法不同。高速CAN终端电阻接在线缆终端,可以保证特性阻抗连续;低速CAN分别接在两条线上。
CAN总线的终端电阻仅限于下表中规定的范围( ISO11898-2 )。
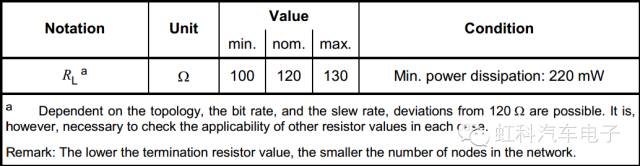
注:在汽车电子领域,一般都是用120欧姆的终端电阻。但是在工业自动化等其它应用领域,如果通信距离过长,为了保证CAN电平的最小幅值,需要匹配更大的终端电阻。
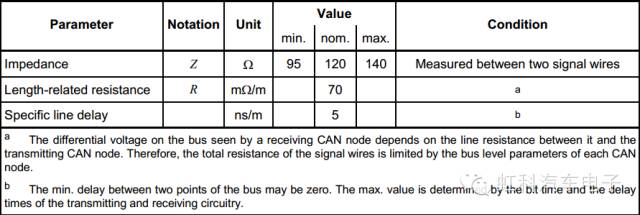
选作CAN总线的电缆必须达到下面给出的规格( ISO11898-2 ),这些规格主要用于标准化电气特性,并不涉及机械或材料方面的参数。
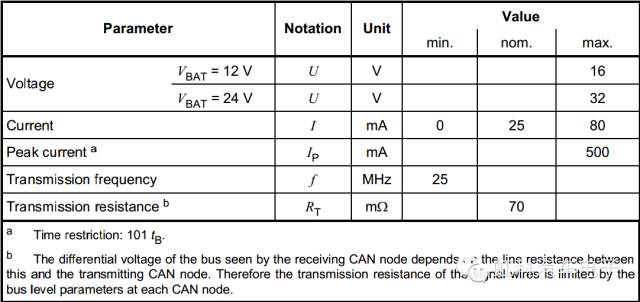
用于将ECU连入CAN总线的连接器必须符合下表中所规定(ISO11898-2)的要求,本规范的这个部分旨在标准化那些最重要的电气参数,并不涉及机械或材料方面的参数。
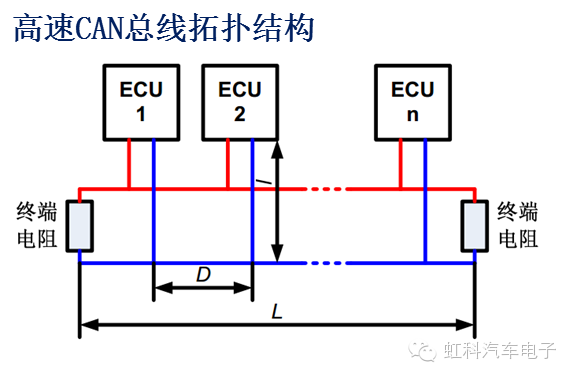
三、CAN总线拓扑结构
下图是高速CAN总线的拓扑结构,总线长度、支线长度和节点距离可以参考下图和表格。

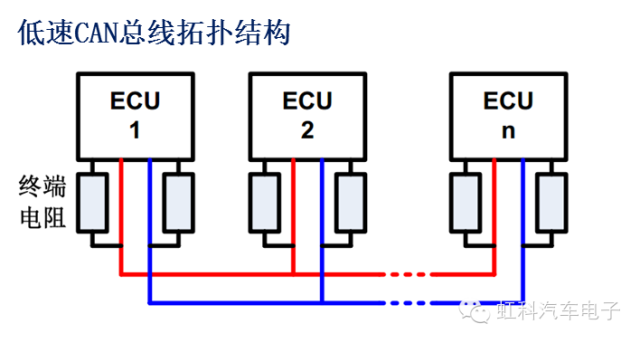
下图是低速CAN总线的拓扑结构。