

点击上方蓝字谈思汽车
获取更多汽车网络安全资讯

摘要
汽车行业的快速发展给人们带来了极大的便利。 然而,一些问题,如燃料消耗、污染物排放和交通拥堵已经变得越来越严重。 特别是在城市高速公路上,如何解决这些问题引起了研究人员的注意。因此,本文以“碳峰碳中和”为理念,基于V2X (vehicle-to-everything)通信系统,设计了一套先进的智能网联汽车生态驾驶辅助系统。首先,智能路侧设备在城市高速公路上收集交通和车辆信息。其次,边缘计算服务器融合数据,形成动态交通流的全息感知,并传输区域道路交通安全预警提示。同时,考虑到融合后的数据,提出了一个最小能耗的车辆速度引导模型。第三,在V2X通信中设计了一个应用程序,以显示安全警告提示、交通和车辆的状态,以及最佳速度指导。最后,现场测试的实验结果表明,采用先进的生态驾驶辅助系统的车辆的能源消耗明显减少。此外,驾驶员可以获得当前的交通状况和安全警告提示,从而提高了驾驶安全性。
关键词
碳峰值和碳中和,先进的生态驾驶辅助系统,智能互联车辆,V2X通信系统,最佳速度引导。
世界各地的研究人员对先进的生态驾驶辅助系统进行了不同的研究。赵晓华等根据北京出租车的实际运营数据,分析了城市快速路不同道路交通条件下驾驶行为与车辆油耗之间的关系,认为综合节能潜力可达到11. 18% [1]. 王振波等人分析了车身轻量化设计对电动汽车能耗的影响,认为能耗与整车质量基本呈线性关系。因此,尽量减少车辆的质量有利于降低能源消耗[2]。宋媛媛提出了不同驾驶条件下电动汽车能耗的定量模型,重点研究了车辆驾驶参数的影响,建立了不同形式的微观能耗模型[3]。
李晓鹏等人利用分段二次函数构建车辆时空轨迹,简化了高速公路环保驾驶的优化控制问题,并将优化变量从有限时间内的多个连续速度值转换为多个函数曲线系数,大大减少了优化变量的数量,提高了求解效率[4]。 考虑到车辆轨迹、瞬时速度曲线和路面坡度对能源消耗的影响,Anastasiadou等人提出了一个基于车辆特定功率的电动汽车能源消耗模型[5]。由于温度、风速、电池SOC、辅助负载、道路海拔、车速和加速度等影响,莫迪等人使用卷积神经网络(CNN)来建立能耗预测模型[6]。
综上所述,关于生态驾驶策略和能耗测量方法的研究很多,但有些研究只考虑了车辆状态信息或道路状况对能耗的影响,没有与交通环境信息相结合,应用有限。此外,道路和车辆状态信息不能被全面提取,一些全局最优方法有大量的计算量,这导致预测的准确性和结果的可信度下降。随着智能互联汽车和5G通信技术的发展,基于车对车(V2V)和车对基础设施(V2I)的智能交通系统为智能绿色出行提供了新的机遇[7]。
因此,我们提出了一个先进的生态驾驶辅助系统,用于智能互联车辆,该系统由V2X通信系统支持。通过对动态交通的立体感知,一方面可以将周围的交通信息反馈给驾驶员进行辅助驾驶,另一方面可以应用于车速引导模型,获得最佳车速,从而实现该地区群体的生态驾驶。
本文的其余部分组织如下。在下一节中,我们介绍了先进的生态驾驶辅助系统和智能互联车辆架构,并提出了一个基于车辆和交通的融合数据计算出能耗最低的速度的最佳速度指导模型。最后,先进的生态驾驶辅助系统在一个真实场景中进行了测试。通过最后的结果,总结了结论并提出了未来的研究方向。
A. 高级生态驾驶辅助系统的架构
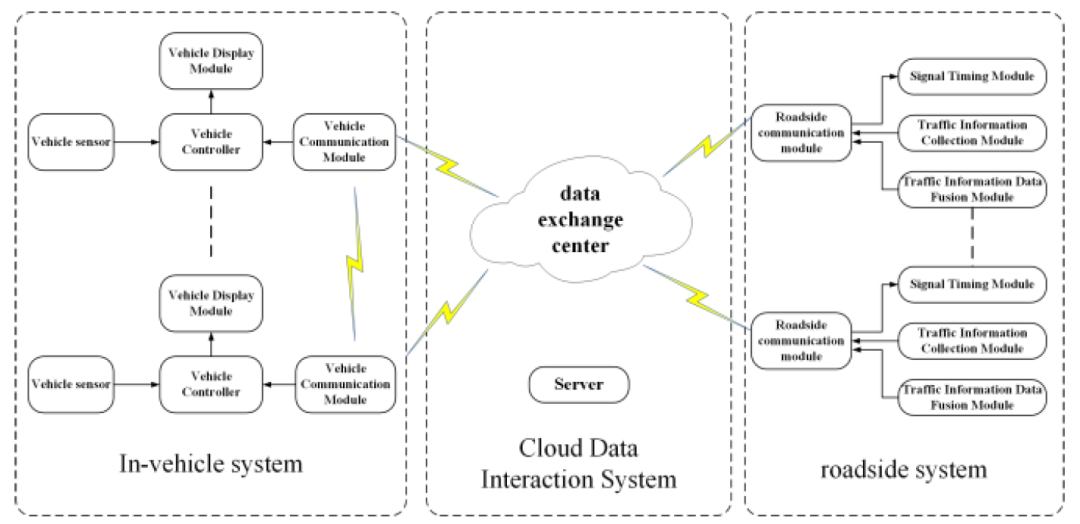
先进的生态驾驶辅助系统由基于V2X通信系统的智能路侧设备和智能互联车辆的车载应用组成。智能路边设备包括多源传感器,如高清摄像头、激光雷达和碳检测器。而车载应用程序用于显示当前交通状况、车辆状态、安全警告提示和最佳速度指导等信息。
智能路侧平台融合上述传感器的数据,并传输到边缘计算服务器,再结合边缘计算服务器中的交通事件数据和V2X数据(包括车速、加速度等信息),从而对历史和未来交通流量数据、空间关系轨迹、预测交通流量数据、当前交通状态和车载传感器信息等信息进行处理,进行安全预警提示。同时,车载系统结合路边平台反馈的当前车速、路况、碳排放等信息,计算出最佳车速,以最大限度地减少能源消耗。
最后,先进的生态驾驶辅助系统实现了紧急预警、碰撞预警、道路状态提示和最佳速度引导等功能。高级生态驾驶辅助系统的技术结构如图1所示。
B. 智能互联汽车的V2X通信系统
在驾驶过程中,由于盲点或视线被遮挡,司机可能无法及时、正确地评估当前的驾驶和交通状况。那么,在紧急情况下,司机可能会急剧加速或减速,这很危险,并将大大增加车辆的能耗。因此,我们设计了一个基于V2X通信系统的智能互联汽车架构[8],它将智能路边多源传感器与车载传感器相结合,收集交通状况数据,使司机能够与当前的道路交通状况进行互动。智能互联汽车的架构设计如图2所示[9]。
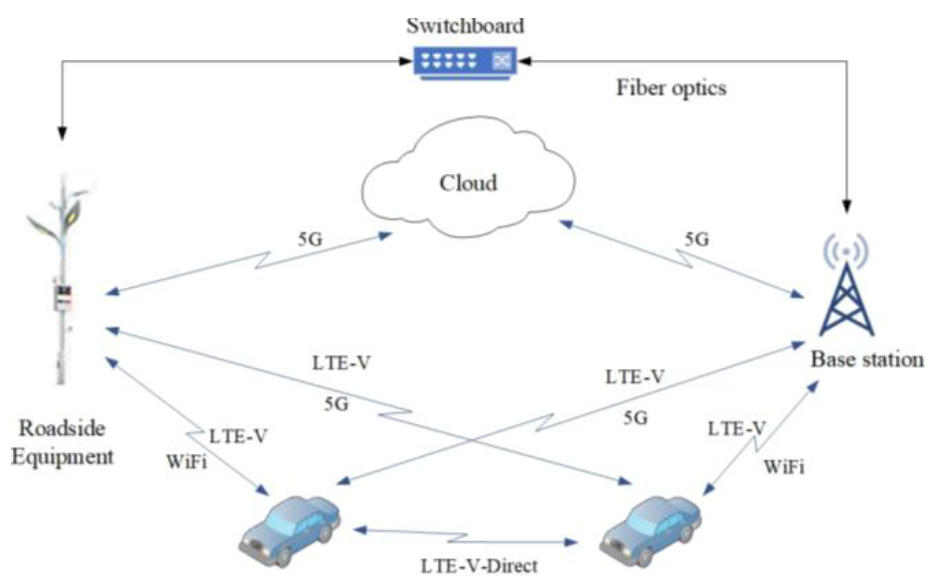
其中,车辆之间的低延迟和高可靠性的通信可以通过LTE-V-Direct技术实现。此外,在5G蜂窝网络的协助下,交通数据被快速上传和下载,然后实现车辆和路边设备之间的宽频带和覆盖通信。路边设备通过多源传感器感知周围车辆信息,并接收车辆状态数据,包括位置、速度、加速度、航向角、高度等。
车辆通过V2X通信系统获得的路况信息和交通流信息,协助司机评估当前的交通状况。此外,这些信息被用于最小能耗的速度指导模型中,以计算出最佳速度。
C. 最佳速度引导模型
根据碳峰值和碳中和的概念,我们为先进的生态驾驶辅助系统开发了一个最佳速度引导模型[10]。基于动态交通全息感知和车辆运行状态信息,本文提出了智能互联车辆的最优速度引导模型。该模型通过对车辆和交通数据的分析和计算,规划出能耗最低的速度,然后传输给纵向速度控制器,进行加速或制动,以达到经济和环保的目的,如图3所示。
1) 电动汽车能源消耗的预测方法: 当电动汽车减速和制动时,其传动系统可以将部分动能回收到电池。因此,在构建车辆能耗模型时,我们不仅要考虑电池提供给电机和车载设备的电能,还要考虑制动所回收的能量[11]。

我们研究的是车速对能耗的影响,所以只考虑纵向的车辆动力学模型[12],如公式(1)所示:

其中 Ft 表示驱动力, M 表示质量, v 表示速度,d表示旋转质量的修正系数,f 表示滚动阻力系数, q为道路坡度, CD 表示空气动力阻力系数, A 表示迎风面积,r 为空气密度, v(t) 表示车速,Pwheels 表示电动汽车车轮的功率。电能回收主要受系统结构、行驶路况和驾驶习惯的影响[13],制动能量回收如公式(2)所示:

其中 hr 表示电力回收效率,vi t +D和vi 表示前一时刻和当前制动时刻的速度。电动汽车的车载电子设备能耗计算方法见在公式(3)中:
其中 Ei 分别表示每个机载附件所消耗的能量,ni 表示其相应的效率。
2) 具有最低能耗的速度引导模式: 总之,当电动汽车加速或以恒定速度行驶时,电机作为耗电元件,消耗电池的电能,将其转化为驱动扭矩。在这个过程中,电池SOC(充电状态)的减少是由电机的功率消耗造成的。 当车辆减速时,电机作为一个发电机,将制动扭矩转化为制动能量,为电池供电,电池SOC上升。电池SOC可以反映出车辆的能量消耗。本文建立了一个能量消耗模型,通过确定车速和电池SOC之间的数学关系得到。
我们使用安培小时积分法来估计电池SOC[14],如公式(4)所示:
其中 Q t +Dt 表示电池单元在下一时刻的SOC;Qt 表示电池单元在当前时刻的SOC;C0 表示电池单元的最大容量, ai (t) 表示加速度, Ibat 表示电池单元的电流,Vbat 表示电池单元的电压。
实际功率不是一个固定值。它随着电机的角速度和电机的实际扭矩而变化。
当电动汽车加速或匀速行驶时,随着电机的角速度和电机的实际扭矩的增加,电机的实际功率也在增加,这意味着电机的耗电能力变强,电池SOC下降得更快。当电动车减速时,随着电机角速度和实际电机扭矩的绝对值增加,实际电机功率的绝对值也增加,这意味着电机的充电能力变强,电池SOC上升得更快。在本文中,电机的实际功率是由电机的角速度和电机的实际扭矩得到的。电机的实际功率用公式(5)表示,其中 L 是电机实际功率的数值函数,Tmot _ act (v) 表示电机实际扭矩, w mot 表示电机角速度。

3) V2X通信中速度引导的最佳解决方案: 在V2X场景下,当前电动汽车的车速和交通信息可以通过智能路侧设备获得,因此我们提出了一种基于智能互联交通的车速即时优化控制方法,如式(6)所示。
在电动汽车的驾驶过程中,我们在V2X通信中计算出车辆的最佳瞬时速度。根据当前的车速和不同的下一刻加速度,我们可以计算出不同的转速以及电机的扭矩,并进一步计算出不同的电池在下一刻的剩余电量。因此,我们可以找到与电池的最高剩余功率水平相对应的速度和加速度。因此,通过使用即时最优控制方法,可以实时调整速度和加速度,使车辆在行驶过程中的能量消耗降到最低。
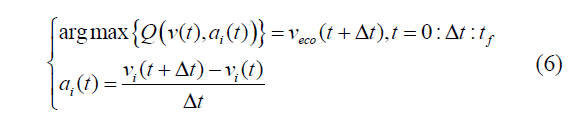
其中 veco (t +t) 表示下一时刻的经济车速, tf 表示驶出道路的时间, v(t) 表示当前的车辆速度, vi (t +t) 表示所有可以为车辆的下一个时刻选择的速度点。
将下一时刻的所有速度点带入SOC公式,我们可以得到下一时刻所有速度点对应的电池单元,然后我们可以找到使下一时刻电池单元的SOC最高的点,此时能耗最低,速度是下一时刻车辆的最佳速度。
此外,我们设计了一个车载辅助驾驶系统的应用,它是基于C#和.NET框架实现的,用于与用户进行视觉交互,如图4所示。根据功能,分为七个模块:最佳速度引导模块、紧急预警或最佳速度引导、信号状态、车辆状态分析、路况指示、驾驶记录、风险指示和碰撞预警。
在安全验证场景中,当车辆行驶在十字路口路段时,路边的摄像头和LiDAR检测到周围的行人和车辆信息,并将其传输给边缘计算服务器,服务器会将处理后的当前路口交通状态信息发送给车辆终端,并在应用程序中显示行人警告,以提醒驾驶员注意行人的位置。如果有潜在的车辆碰撞风险,则会弹出代表其他车辆碰撞风险的 "红色感叹号",以确保车辆和行人安全。
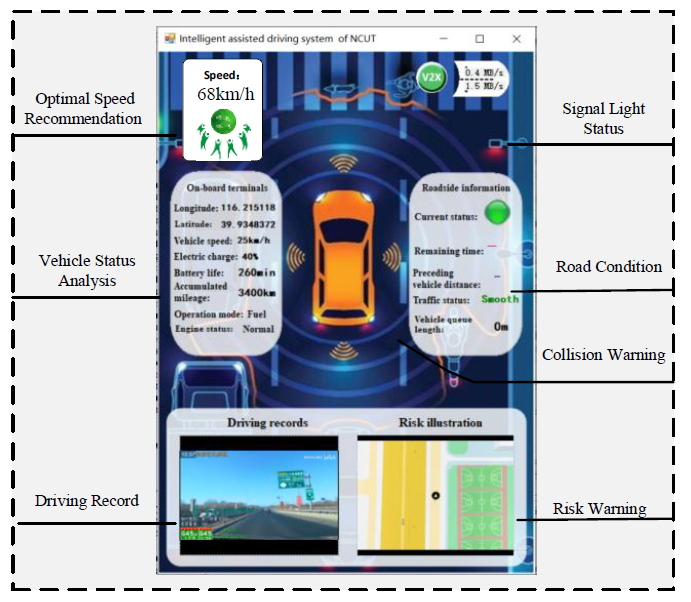 图4. 限速提醒和注意行人警告
图4. 限速提醒和注意行人警告
III.真实场景下的实验
为了验证本文提出的最优速度算法,我们在北京市石景山区阜石路进行了V2X多源传感器数据融合的真实场景测试,如图5和图6所示,绿色粗线描述了选定的路段。在实验中,我们定义了电动车、电池和配方的参数,如表一所示,其余的参数可以通过路边设备获得。此外,我们还通过先进的生态驾驶辅助系统预测能源消耗。经过验证,预测值与实际值的误差如图7所示。可以看出,相对误差的绝对值不超过4%,平均误差为2.996%,可以满足实际场景要求,为速度预测模型提供数据支持。
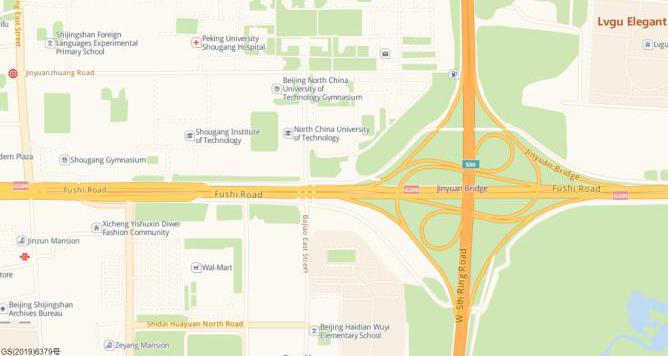 图5. 真实场景下的测试路段
图5. 真实场景下的测试路段

图6. 实验测试场景
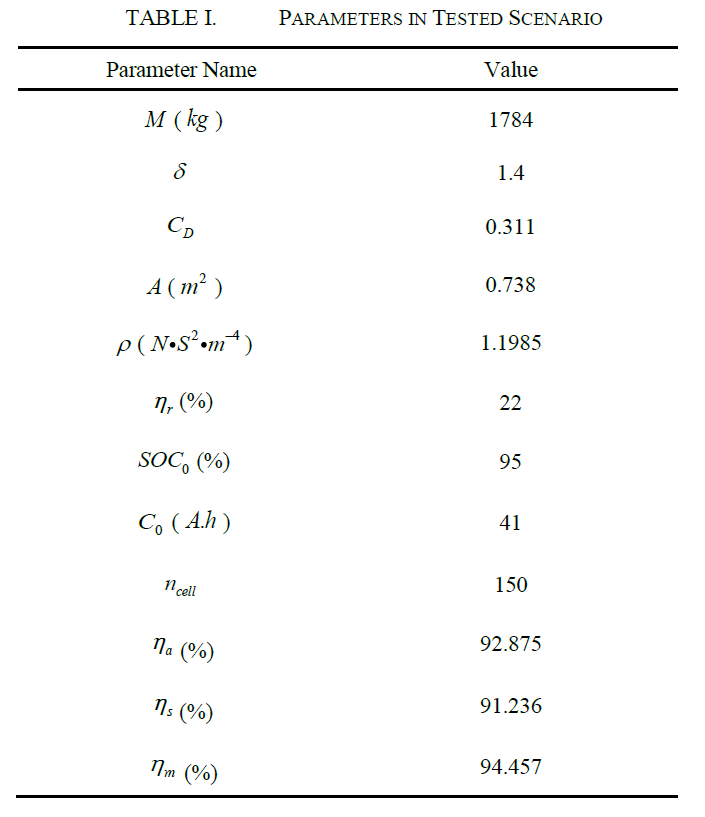
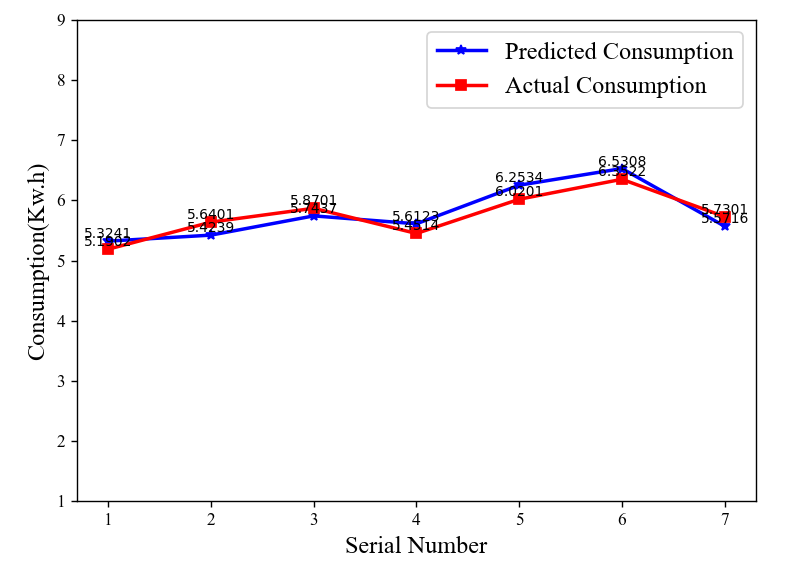
图7. 能源消耗比较的预测误差
在相同的道路条件下,我们分别收集了一天中9:00至10:00的辅助驾驶和一般驾驶的相应能耗。经过一周的观察和统计,结果如图8所示,其中橙色线代表高级生态驾驶辅助策略下的能耗变化,蓝色线代表一般驾驶条件下的能耗变化。从图7可以看出,辅助驾驶在相同的道路条件下可以减少9.3%的能耗,并有效增加车辆的续航能力,达到了经济和环保的双重目的。
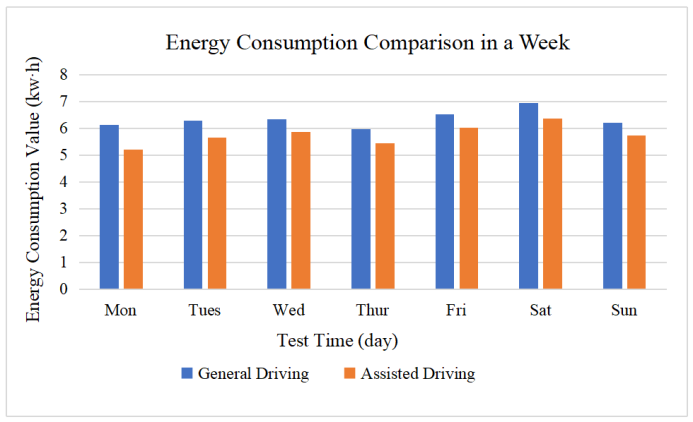 图8. 一周内的能源消耗比较
图8. 一周内的能源消耗比较
在低碳场景的验证中,当车辆行驶在路况平稳的城市高速公路上时,路边的传感器会检测路况信息和环境碳排放数据,然后将它们传输到边缘计算服务器。根据最小能耗速度指导模型,边缘计算服务器计算出最佳速度,并将其发送到车载终端,在生态驾驶系统应用中显示,如图9所示。
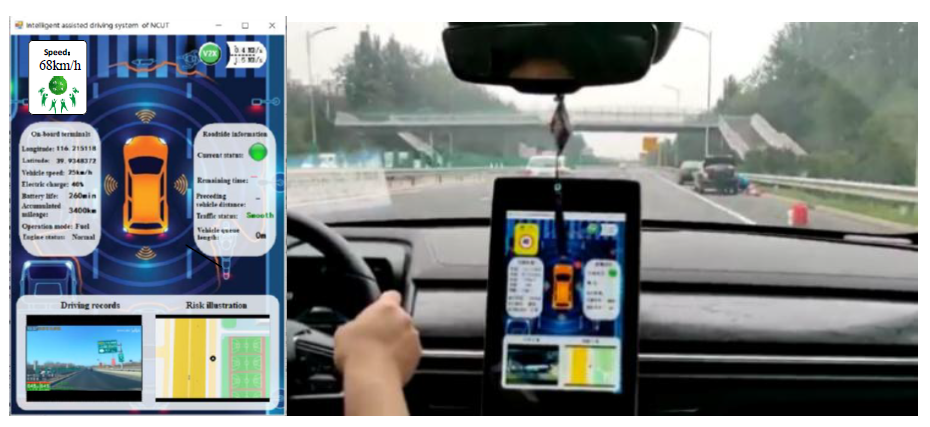 图9. 最佳速度引导情景验证
图9. 最佳速度引导情景验证
IV.总结
为了实现可持续交通,我们选择城市高速公路作为应用场景。本文以低碳排放为理念,为智能互联车辆设计了一个先进的生态驾驶辅助系统。 首先,我们介绍了先进的生态驾驶辅助系统的架构和用于智能互联车辆的V2X通信系统,通过数据融合对车辆周围的交通物体进行分类和识别。其次,边缘计算服务器获得道路和车辆状态信息,并计算出最佳速度,然后将这些数据发送给高级生态驾驶辅助系统。最后,该应用显示车辆状态信息、安全警告提示和最佳速度指导,以帮助司机安全和低碳驾驶。通过在真实场景中的测试,实验结果表明,能耗比较的预测误差不超过4%,平均误差为2.996%。此外,配备先进的生态驾驶辅助系统的电动汽车在同等路况下可降低9.3%的能耗,能够满足实际智能互联交通场景下的安全低碳驾驶要求,推动未来 "碳峰碳中 "时代绿色安全出行方式的不断创新和发展。
参考文献:
[1] X. Zhao, C. Chen, Y. Wu, J. Rong, Y. Liu, Y. Cheng, et al. , “The Effect
and Potential Study of Eco-driving on Taxi Fuel Consumption, ”
Journal of Transportation Systems Engineering and Information Technology, 2015, 15(4): 85.
[2] G. De-Las-Heras, J. Sánchez-Soriano, E. Puertas, “Advanceddriver
assistance systems (ADAS) based on machinelearning techniques for the detection and transcription of variable message signs on roads.”Sensors, 2021, 21(17): 5866.
[3] Z. Han, J. Liang, J. Li, “Design of intelligent road recognition and
warning system for vehiclesbased on binocular vision,” IEEE Access, 2018, 6: 62880-62889.
[4] X. Li, A. Ghiasi, Z. Xu, “Exact Method for a SimplifiedTrajectory
Smoothing Problem with Connected Automated Vehicles,” Proceedings of 96th Annual Meeting of the Transportation Research Board, Washington, DC. 2017.
[5] E. Arnold, M. Dianati, R. de Temple, S. Fallah, et al., “Cooperative
Perception for 3D Object Detection in Driving Scenarios Using Infrastructure Sensors,” IEEE Transactions on IntelligentTransportation Systems,2020:1- 13.
[6] S. Zhang, Y. Luo, J. Wang, X. Wang, K. Li, “Predictive Energy
Management Strategy for Fully Electric VehiclesBased on Preceding Vehicle Movement,” IEEE Transactions on Intelligent Transportation Systems, 2017, 18(11): 3049-3060.
[7] P. Wang , Y. Jiang , L. Xiao , Y. Zhao, Y. Li, " Ajoint control model
for connected vehicle platoon and arterial signal coordination," Journal of Intelligent Transportation Systems, 2020, 24(1): 81-92.
[8] X. Wang, J. Han, C. Bai, H. Shi, J. Zhang, G. Wang, “Research on the
impacts of generalized preceding vehicle information on traffic flow in V2Xenvironment,” Fut. Int. 2021, 13, 88.
[9] P. Wang , H. Deng , J. Zhang ,L. Wang, M. Zhang,Y. Li,"Model
predictive control for connected vehicle platoon under switching communication topology," IEEE Transactions on Intelligent Transportation Systems, 2021.
[10] P. Liao, T. Tang, R. Liu, H. Huang, “An eco-driving strategy for
electric vehicle based on the powertrain.” Applied Energy,2021,302.
[11] I. Ullah, K. Liu, T. Yamamoto,M. Zahid, A. Jamal, “Electricvehicle
energy consumption prediction using stacked generalization: An ensemble learning approach,”International Journal of Green Energy,2021, 18(9): 896-909.
[12] Qian L, Qiu L, “A novel coordination control of plug-in 4WD hybrid
electric vehicle using fuzzy PID,” The 28th International Electric Vehicle Symposiumand Exhibition, 2015:1-12.
[13] L. Li, X. Ping, J. Shi J, X. Wang, X. Wu, “Energy recovery strategy for
regenerative braking system of four‐wheel independent drive electric vehicles,” IET Intelligent Transport Systems,2018,15(1):14-21.
[14] B. Fan, X. Luan, R. Zhang, T. Niu, Y. Xie, “Research on SOC
Estimation Algorithm for Lithium Battery Based on EKF Algorithm and Ampere-hour Integration Method,” Science and Engineering Research Center. Proceedings of 2017 2nd International Conference on Electrical, Control and Automation Engineering (ECAE 2017). Science and Engineering Research Center: Scienceand Engineering Research Center. 2017: 110-114.


码上报名
2023第六届无人驾驶及智能驾舱中国峰会,
5月11-12日,上海

码上报名
AutoSec 7周年年会暨中国汽车网络安全与数据安全合规峰会,5月11-12日,上海

码上报名
第四届中国国际汽车以太网峰会,6月8-9日,上海


