关注+星标公众号,不错过精彩内容

作者 | strongerHuang
微信公众号 | strongerHuang
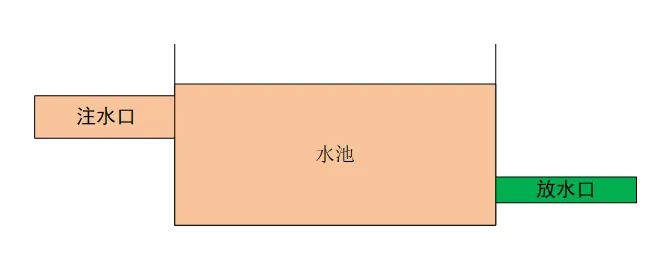
FIFO 是First-In First-Out的缩写,它是一个具有先入先出特点的缓冲区。
可以理解成一个大的水池,水对应数据,注水速度对应数据输入的频率,放水速度对应数据处理的速度,当注水速度和放水速度相同时,我们不需要使用水池来缓冲,但是当注水速度大于放水速度,或者注水速度突然变大时(突发),为了保证水池不溢出(数据不丢失),就需要水池(缓冲区)来处理这种突发情况,并设置合理大小的水池空间(FIFO的深度)。
或者为了降低CPU负担,提高数据处理效率,可以在积累到一定的数据量之后,再一次性处理。
在FPGA中,FIFO一般是使用RAM存储器作为缓冲区,可以分为同步FIFO或异步FIO,一般用于数据缓冲,或者不同时钟域之间的数据传递。
在单片机中,一般是基于一维数组和结构体实现的循环队列(Queue),或者叫环形队列。
FIFO的使用,既可以保证数据的完整性,还可以让数据被及时的处理。
本文介绍,基于C语言的循环队列缓冲区原理、设计与实现。
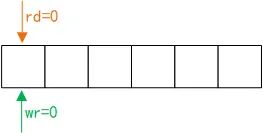
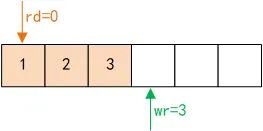
定义一个一维数组当作存储区,数组长度为6,再定义两个读写指针变量。
初始化时,FIFO为空,读写指针相等,并都置为0。
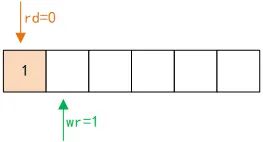
写入一个数据1之后,写指针递增,读指针不变:
再写两个数据2和3,写指针递增,读指针不变:
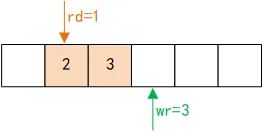
写了三个数据之后,我们读出一个数据1,写指针不变,读指针递增:
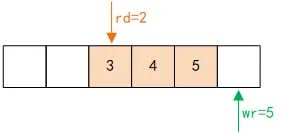
读出一个数据2,再写两个数据4和5,读写指针变化:
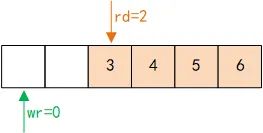
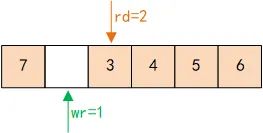
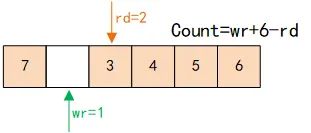
再写一个数据6,此时超过数组长度,但是数组头部还有空间,所以写指针回到数组起始地址0:
再写一个数据7,此时判断FIFO满:
可能会有朋友疑惑,不是还有一个空位置可以存放数据吗?
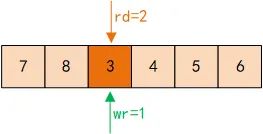
如果再存入一个数据之后,读写指针相等,此时可以判断是满状态吗?
显然是不能,因为当FIFO为空时,也是读写指针相等,所以这种情况就无法判断满和空。
这里就涉及到FIFO设计中,最重要的满和空的判断条件,需要遵循FIFO读写的两个规则:
FIFO为空时,不能执行读操作
FIFO为满时,不能执行写操作
为了避免这种情况发生,我们空出一个元素位置,写指针指向的位置永远为空,这样就会有两种满的情况:
rd < wr
rd > wr
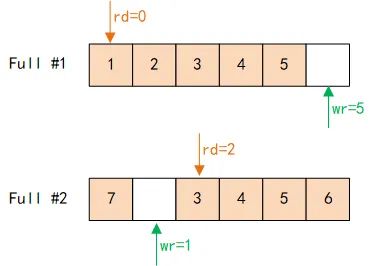
对于第一种情况,当(wr + 1) % FIFO_SIZE == rd时,可以认为FIFO满,FIFO_SIZE是指数组长度;
对于第二种情况,当wr + 1 == rd时,可以认为FIFO满。
以上两种情况可以合并为一种,即(wr + 1) % FIFO_SIZE == rd时,判断FIFO满。
所以这种判断方式,会牺牲一个存储位置,实际可以存储的元素个数为FIFO_SIZE-1。
同理,获取当前FIFO内元素的个数,也可以分为两种情况:
当wr > rd时, count = wr - rd
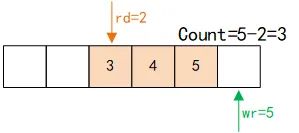
当wr < rd时,count = wr + FIFO_SIZE - rd
根据以上FIFO存取逻辑,我们可以使用一维数组来构造一个环形缓冲区,读写地址循环递增,分别实现FIFO初始化、读写操作、判断空满、获取元素个数等函数,并封装成模块。
xqueue.h
/*
* Copyright(C), 2010-2023, CSDN @ whik1194
* Time : 2023年4月9日
* Author : https://blog.csdn.net/whik1194
* GitHub : https://gitee.com/whik/xqueue
*/
#ifndef __XQUEUE_H__
#define __XQUEUE_H__
#include "stdint.h"
/* FIFO数据的类型,可以是结构体类型 */
#define qdata_t uint8_t
/* FIFO长度,实际存放的数据=FIFO_SIZE-1 */
#define FIFO_SIZE 6
typedef enum {
QUEUE_OK,
QUEUE_FULL,
QUEUE_EMPTY
}qstatus_t;
typedef struct {
uint16_t addr_wr; /* 写地址 */
uint16_t addr_rd; /* 读地址 */
uint16_t length; /* FIFO长度,实际存放的数据=length-1 */
qdata_t fifo[FIFO_SIZE];
}queue_t;
qstatus_t queue_reset(queue_t *q);
qstatus_t queue_read(queue_t *q, qdata_t *pdata);
qstatus_t queue_write(queue_t *q, qdata_t data);
int queue_isFull(queue_t *q);
int queue_isEmpty(queue_t *q);
int queue_print(queue_t *q);
#endif
xqueue.c文件
/*
* Copyright(C), 2010-2023, CSDN @ whik1194
* Time : 2023年4月9日
* Author : https://blog.csdn.net/whik1194
* GitHub : https://gitee.com/whik/xqueue
*/
#include "xqueue.h"
#include "stdio.h"
/* FIFO复位 */
qstatus_t queue_reset(queue_t *q)
{
int i = 0;
q->addr_wr = 0;
q->addr_rd = 0;
q->length = FIFO_SIZE;
for(i = 0; i < q->length; i++)
q->fifo[i] = 0;
return QUEUE_OK;
}
/* FIFO写入数据 */
qstatus_t queue_write(queue_t *q, qdata_t data)
{
if(queue_isFull(q))
{
printf("Write failed(%d), queue is full\n", data);
return QUEUE_FULL;
}
q->fifo[q->addr_wr] = data;
q->addr_wr = (q->addr_wr + 1) % q->length;
printf("write success: %02d\n", data);
queue_print(q);
return QUEUE_OK;
}
/* FIFO读出数据 */
qstatus_t queue_read(queue_t *q, qdata_t *pdata)
{
if(queue_isEmpty(q))
{
printf("Read failed, queue is empty\n");
return QUEUE_EMPTY;
}
*pdata = q->fifo[q->addr_rd];
q->addr_rd = (q->addr_rd + 1) % q->length;
printf("read success: %02d\n", *pdata);
queue_print(q);
return QUEUE_OK;
}
/* FIFO是否为空 */
int queue_isEmpty(queue_t *q)
{
return (q->addr_wr == q->addr_rd);
}
/* FIFO是否为满 */
int queue_isFull(queue_t *q)
{
return ((q->addr_wr + 1) % q->length == q->addr_rd);
}
/* FIFO内数据的个数 */
int queue_count(queue_t *q)
{
if(q->addr_rd <= q->addr_wr)
return (q->addr_wr - q->addr_rd);
//addr_rd > addr_wr;
return (q->length + q->addr_wr - q->addr_rd);
}
/* 打印当前FIFO内的数据和读写指针的位置 */
int queue_print(queue_t *q)
{
int i = 0;
int j = 0;
for(i = 0; i < q->addr_rd; i++)
printf(" ");
printf("rd=%d", q->addr_rd);
printf("\n");
for(i = 0; i < q->length; i++)
{
if(q->addr_wr > q->addr_rd)
{
if(i >= q->addr_rd && i < q->addr_wr)
printf("[%02d] ", q->fifo[i]);
else
printf("[ ] ");
}
else//addr_rd > addr_wr
{
if(i < q->addr_wr || i >= q->addr_rd)
printf("[%02d] ", q->fifo[i]);
else
printf("[ ] ");
}
}
printf("------count = %d\n", queue_count(q));
for(i = 0; i < q->addr_wr; i++)
printf(" ");
printf("wr=%d", q->addr_wr);
printf("\n");
return QUEUE_OK;
}
实际应用:
/*
* Copyright(C), 2010-2023, CSDN @ whik1194
* Time : 2023年4月9日
* Author : https://blog.csdn.net/whik1194
* GitHub : https://github.com/whik/xqueue
*/
#include
#include
#include "xqueue.h"
int main(int argc, char *argv[])
{
queue_t queue;
qdata_t data;
queue_reset(&queue);
queue_write(&queue, 1);
queue_write(&queue, 2);
queue_write(&queue, 3);
queue_read(&queue, &data);
queue_read(&queue, &data);
queue_write(&queue, 4);
queue_write(&queue, 5);
queue_write(&queue, 6);
queue_write(&queue, 7);
queue_read(&queue, &data);
queue_read(&queue, &data);
queue_read(&queue, &data);
queue_write(&queue, 8);
queue_write(&queue, 9);
queue_write(&queue, 10);
queue_read(&queue, &data);
system("pause");
return 0;
}
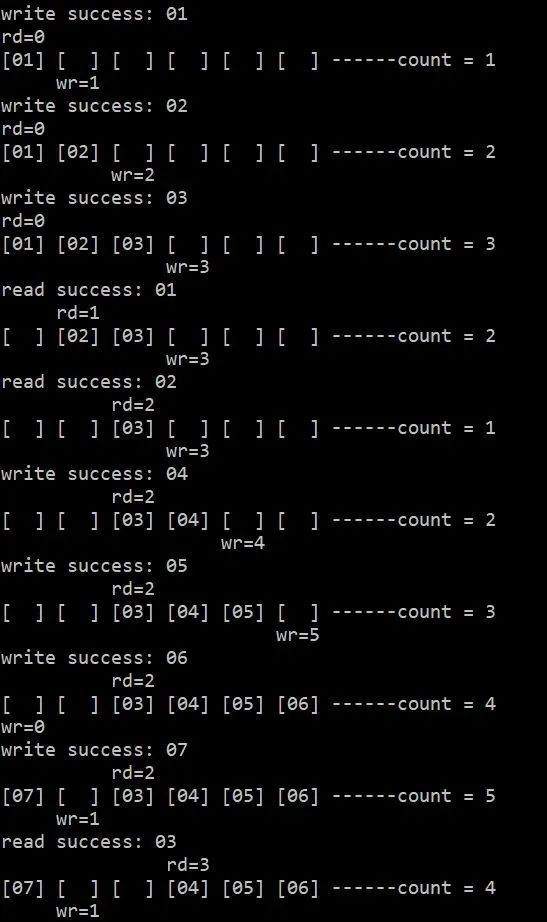
运行结果:
循环队列元素的数据类型,可以根据需要指定,也可以是结构体类型。
后台回复【xqueue】,获取下载地址,或者到以下开源地址获取资料。
xqueue
https://gitee.com/whik/xqueue
------------ END ------------

●专栏《嵌入式工具》
●专栏《嵌入式开发》
●专栏《Keil教程》
●嵌入式专栏精选教程
关注公众号回复“加群”按规则加入技术交流群,回复“1024”查看更多内容。


