点击上方蓝字谈思汽车
获取更多汽车网络安全资讯
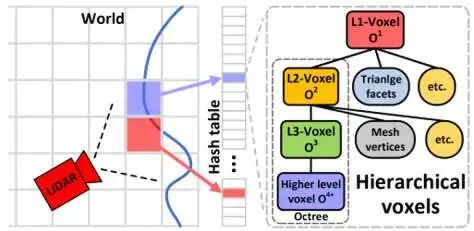
图17 分层体素示意图
码上报名
2023第六届无人驾驶及智能驾舱中国峰会,
5月11-12日,上海
AutoSec 7周年年会暨中国汽车网络安全与数据安全合规峰会,5月11-12日,上海
第四届中国国际汽车以太网峰会,6月8-9日,上海
在线直播意法半导体“在中国,为中国”战略,STM32最新产品、应用及生态; STM32线上训练营带您玩转机械手直播:边缘AI及GUI软硬件开发特训,ST资深专家在线互动答疑。