--关注、星标、回复“自主泊车”--
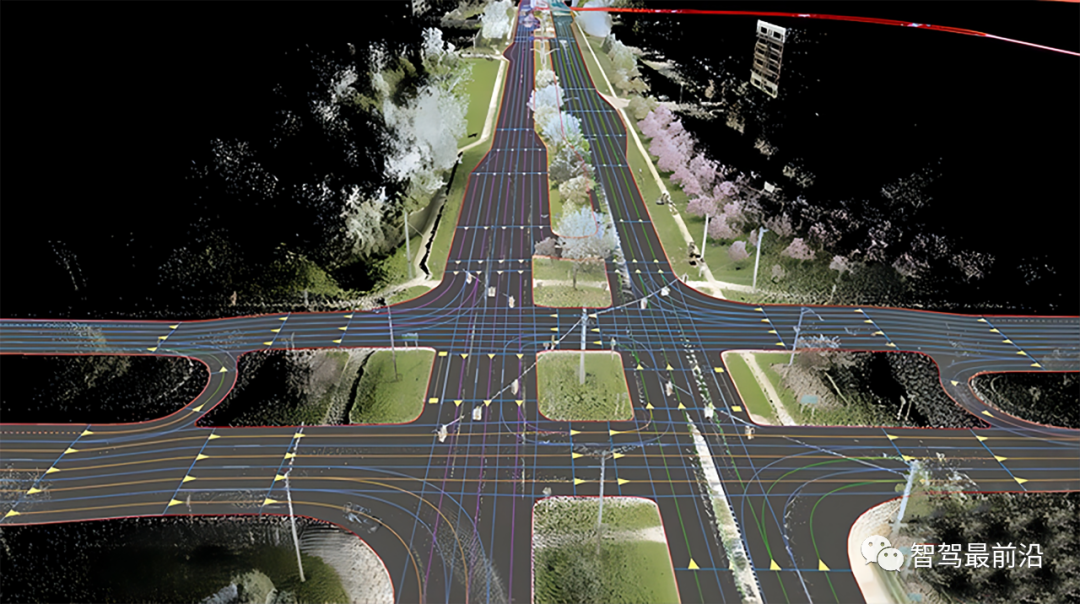
高精度地图作为未来智能汽车中必不可少的资源构件,在自动驾驶系统中发挥着非常重要的作用。和普通的电子导航地图相比,除了面向人类驾驶员,高精度地图更加重要的使用者其实是车辆的自动驾驶系统。通俗来讲,高精度地图是比普通电子导航地图精度更高、数据覆盖度更广的地图。精度更高,顾名思义,是指地图与实际道路环境之间的空间尺寸误差可以达到分米级甚至厘米级。数据覆盖度更广,则是体现在地图数据包含了更加丰富的语义。普通导航地图只记录道路级别的数据,例如道路等级、几何形状、坡度、曲率、方向等,而高精度地图在此基础上增加了车道线类型、宽度等属性,更有诸如护栏、交通标志牌、信号灯状态等详细信息。提高数据覆盖度可以有效地提升车辆自动驾驶功能的ODD,从而大幅提升自动驾驶系统的可用性和终端用户体验。然而,交通环境无论从时间和空间上来说都是瞬息万变的。车辆的自动驾驶系统想要时刻匹配最准确的地图数据是一项非常复杂的工程问题。举例来说,道路临时加设护栏进行封闭施工,会造成部分区域无法正常通行,甚至车道线改画,这对于预装在车辆自动驾驶系统中的高精度地图来说是无法及时变更的,这就会产生一些不必要的交通拥堵,大大降低了交通效率和通行体验。又比如,在实际道路上,常会发生由于交通信号灯故障而需要设立临时信号灯的情况,这种位置、形态随机性都很大的信号灯也会造成自动驾驶系统的误识别或不识别。如何保证提供最实时最准确的地图信息,为自动驾驶系统服务,弥补感知瓶颈,已经成为困扰高精地图产业发展的重要难题。

高精地图的精益化管理
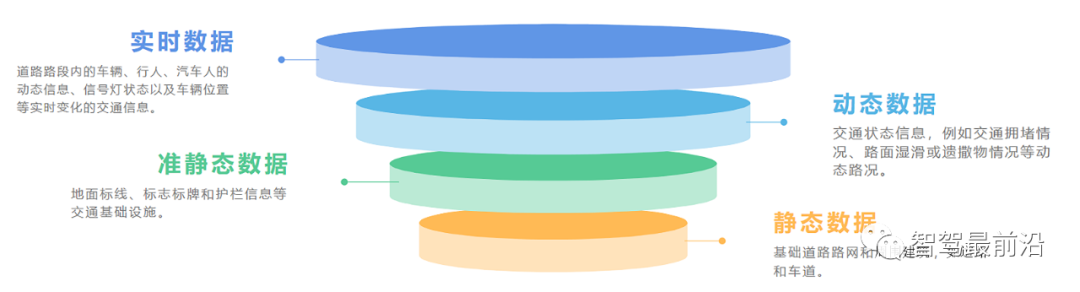
解决高精地图实时更新的问题,我们需要从高精地图的制作方式谈起。高精度地图的制作流程主要由原始数据采集和编译制作两个部分组成,严重制约高精地图生产效率的是高成本、低效率数据采集过程。数据采集是一项庞大的任务,需要投入大量的采集车收集用于高精度地图制作的原始数据。目前高精度地图主流的采集设备是激光雷达、摄像头、IMU惯导、GNSS卫星定位模块等设备的组合。这样的测绘方式,分米级地图的测绘效率约为每天每车 500 公里左右,一辆车一天的测绘成本高达6000元以上,而厘米级地图的测绘效率约为每天每车 100 公里道路,单日单车测绘成本万元以上。从图片上可以看出,高精度地图包含的海量数据足以深度还原我们的真实道路交通环境。为了满足自动驾驶系统的需求,高精地图需要提供高频持续、全局连续的地图数据服务。然而以秒级频率去更新如此庞大的地图数据库,资金投入无法预估,并且对车端地图存储器的性能和数据传输通道也会提出超高的要求,这显然是不现实且不合理的。为了能够更加精益化的进行地图数据更新管理,我们将高精地图数据进行了归类划分,按照不同数据的不同特性,采用针对性的管理和更新手段。高精度地图信息数据可以粗略分为静态数据和动态数据两类。数据库可以从架构上分为四层,第一层是传统的静态数据,即基础道路路网和周围建筑,如道路和车道;第二层是准静态数据,包括地面标线、标志标牌和护栏信息等交通基础设施;第三层是动态数据,即交通状态信息,例如交通拥堵情况、路面湿滑或遗撒物情况等动态路况;第四层是实时数据,主要是指道路路段内的车辆、行人的动态信息、信号灯状态以及车辆位置等实时变化的交通信息。从时效性角度来讲,道路路网、建筑、车道线等静态数据一般按照季度更新即可满足要求,诸如标志标牌、护栏信息等准静态数据需要按照天级更新,动态交通状态如交通拥堵情况及施工阻断等信息需要以分钟级频率进行更新,而行驶中的车辆位置、行人、信号灯等实时数据则必须达到秒级更新。依照不同的更新策略,可以最大程度上减轻图商对高精地图原始数据采集、编译制作、上传下发的负担。

高精地图的“保鲜”方案
高精地图的专业测绘和采集成本是相关高的,虽可解决首次安全通过问题,但无法解决实时变更发现问题。目前行业探索的环境变更发现和实时动态数据更新方案主要有两种:1、众包地图采集(Crowdsourced data)利用行驶在公开道路上的装有感知传感器的海量私家车,让这些车辆在行驶过程中将GPS定位数据、行驶轨迹、行驶路线以及收集到的摄像头和雷达等数据上传到云端,同时自动驾驶车辆在识别到实际道路环境与高精地图信息存在差异时,也会向地图平台上传相关信息,地图平台会将这些反馈来的原始数据进行编译、融合处理之后,及时更新的行车地图。车辆一边从云端下载更新的地图数据,一边将本车新识别道路数据共享上传。然而众包采集这种自由测绘的行为在国内是不符合法律法规要求的,其次是数据质量和安全性也得不到充分的保证。根据国家法规规定,测绘资质是测绘专业必须具备的资质,资质等级为甲、乙两级。2021年6月7日,国家自然资源部办公厅发布了修订后的《测绘资质管理办法》和《测绘资质分类分级标准》,标准分为通用标准和专业标准两部分。通用标准主要针对测绘行为的保密性和测绘单位的管理水平进行了要求,专业标准则是划分了十个领域,如海洋测绘、工程测量、导航地图测量等领域。标准规定凡申请测绘资质的单位,须同时达到通用标准和所申请专业类别的专业标准要求,并且取得乙级测绘资质的测绘单位应在专业标准规定的作业限制范围内从事测绘活动,甲级测绘资质则无作业范围限制。需要注意的是,在中国做地图采集和发布,需要获得电子导航地图制作甲级测绘资质。同时,法规对参与测绘的技术人员和测绘设备也都有非常严格的审核要求。除了法规问题以外,众包更新方案在实际运行效果上也存在一定的弊端和瓶颈。众包地图是解决专业测绘成本问题、提高生产效率的一个思路,但保证地图采集质量的可靠性、一致性,并在海量众包数据中快速提炼生产高精地图以满足实时性要求,仍是一个难题。众包采集一般需要在一定周期内,在相同车道有多次重访,才能确认该路段变更数据的可信度。由于具备地图众包采集能力的车辆分布的不均匀性,导致众包更新方式的新鲜度随机性较大,对于车流量较小的区域,甚至无法提供地图更新服务,更无从保证实时秒级更新。近年来,随着V2X技术的出现,一些高精地图厂商在与V2X厂商合作的过程中发现,不仅是V2X技术需要依赖高精度地图来实现功能,同时,V2X的规模化应用也可以反哺高精地图产业。依靠安装在智慧道路两侧的传感器如摄像头、雷达等,持续观测并实时发现覆盖区域道路变化,将更新数据与既有数据进行融合后,实时地图信息的更新。采用V2X技术更新高精地图的流程可以简单分成几个步骤:(1)摄像头和雷达采集实时路况的结构化数据,并通过以太网传输给路侧边缘计算设备MEC;(2)MEC进行地图数据融合、比较,生成地图局部变更数据;(3)由V2X路侧终端将地图局部变更数据通过V2X数据通路向路段内车辆进行广播;(4)自动驾驶车辆V2X终端接收到地图局部变更数据,并将该数据发送给车辆自动驾驶地图管理模块;(5)自动驾驶车辆根据最新的实时地图进行路径规划、行驶。相比于众包更新,依靠V2X技术在固定空间内以固定频率发送数据(最多每秒30次),可实现稳定的分钟级地图更新服务,但秒级的更新是否能够实现还需要取决于MEC进行地图计算的能力。此外,从成本上来讲,这种方案的主要计算行为集中在路侧边缘计算设备中,是不需要将传感器获取的原始数据通过蜂窝网络向云端进行传输的,这样就节省了大量的流量费用。

小结
众包地图处于法规的灰色地带,而依靠V2X技术的更新方案由于基建问题,短期内也无法实现真正应用。探索更加精准、高效、低成本、多触达方式的高精度地图更新技术,也将是产业内需要长期探索和实践的课题。转载自焉知智能汽车,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --