多传感器融合定位的方案能够弥补单一传感器定位的局限,使得定位系统更加鲁棒。但多传感器融合定位是一个庞大的系统,涉及的内容广泛而繁杂,自学难度大,即使大家通过零散的知识点学习到一些知识,也很难系统性地理解定位的核心,更难了解到落地经验的精髓。
基于此,深蓝学院联合自动驾驶定位总监任乾联合开设了『多传感器融合定位』在线课程。本课程将亲手带着大家搭建前端-回环检测-基于滤波-基于图优化的融合定位解决方案,最终带领大家实现激光雷达+GNSS+IMU+轮速计的传感器融合定位系统。
请务必备注441,优先通过!

讲师简介
自动驾驶建图与定位总监
课程大纲
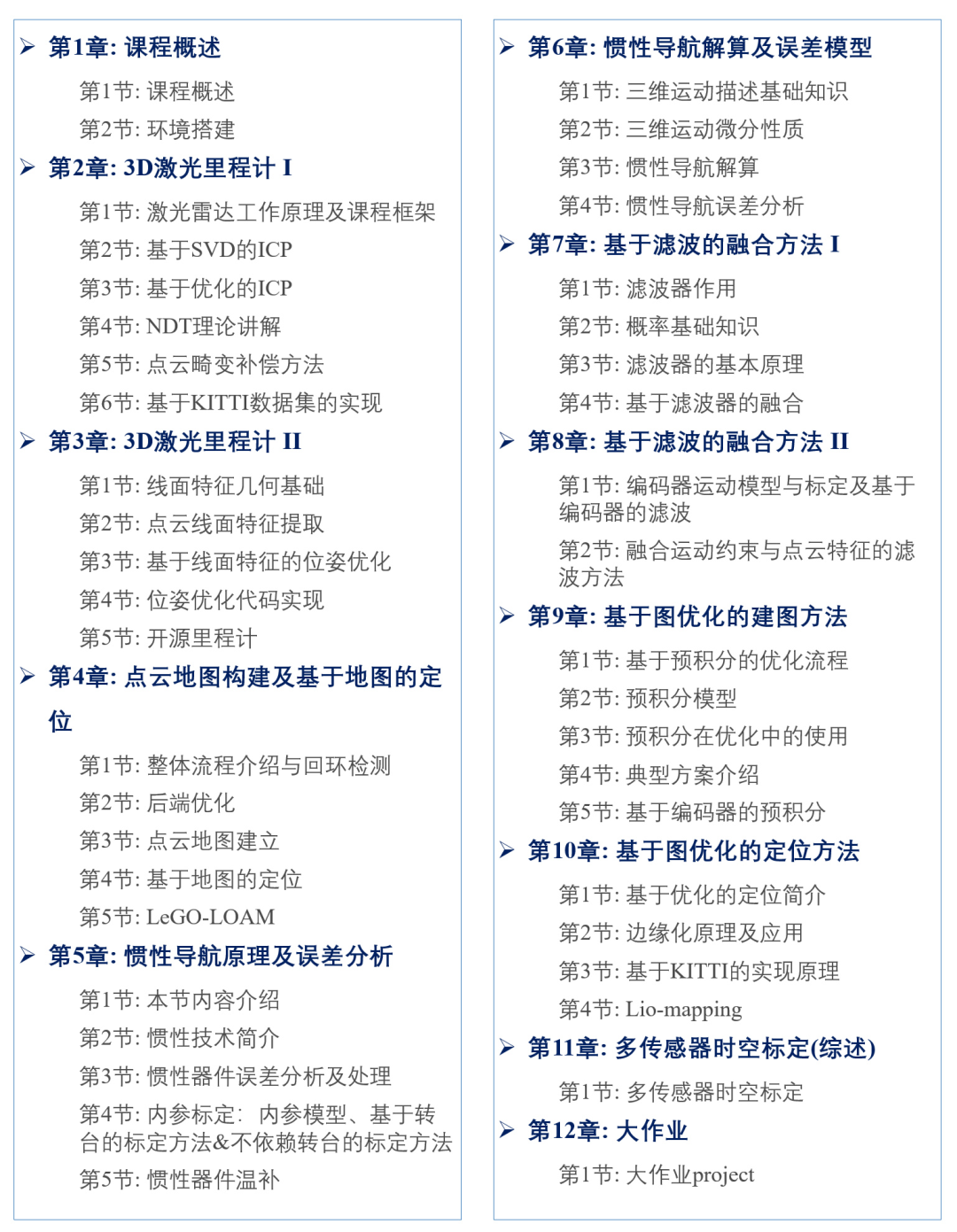
(点击查看大图)
项目实践
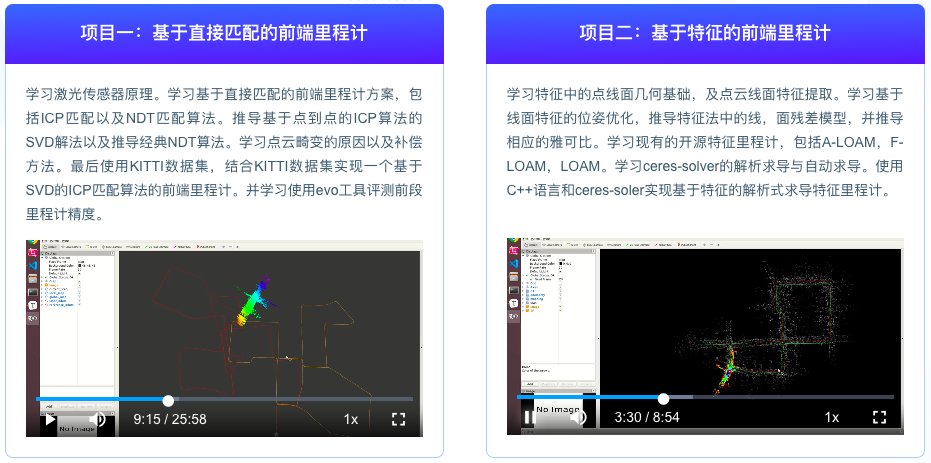
(点击查看大图)
学后收获
1. 掌握常用3D激光SLAM算法的原理以及代码实现,并具备根据需求改进算法的能力;
2. 掌握点云地图构建及基于地图定位的原理,具备独立建图和定位的工程能力;
3. 掌握惯性器件误差特性及标定、温补方法,以及多传感器时空标定的方法;
还能收获
学完课程后将有机会收获优秀学员证书、毕业证书,为你的简历加分添彩。
课程服务
助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。