


6. 复位要求和复位电路
Arm® Cortex®-M23产品共有12或13种类型的复位。
表11. Arm® Cortex®-M23 MCU复位

注:RA2E1及RA2E2产品不支持。
6.1 引脚复位
当RES#引脚被拉低时,所有处理都将中止,MCU进入复位状态。要在运行中复位MCU,应在指定的复位脉冲宽度内将RES#保持为低电平。有关时序要求的更详细信息,请参见《硬件手册》中“电气特性”一章的“复位时序”部分。另请参见本系列文章的第2节“仿真器支持”,了解与调试支持相关的复位电路的详细信息。
无需在RES#线路上使用外部电容,因为POR电路在内部将其保持为低电平以实现良好的复位,并且需要最小的复位脉冲来启动此过程。
6.2 上电复位
有两种情况会产生上电复位(POR):
1. 如果RES#引脚在接通电源后处于高电平状态。
2. 如果RES#引脚在VCC低于VPOR时处于高电平状态。
在VCC超过上电复位电压(VPOR)并经过上电复位时间(tPOR)之后,芯片将从上电复位状态释放。上电复位时间是允许外部电源和MCU达到稳定状态的时间。有关电压大小和时序的详细信息,请参见《硬件手册》中“电气特性”一章的“POR和LVD特性”部分。
由于POR电路依赖于RES#与VCC同时为高电平,因此请勿在复位引脚上放置电容。这将减慢RES#相对于VCC的上升时间,从而妨碍POR电路正确识别上电条件。
当电源(VCC)降至不超过VPOR时,如果RES#引脚为高电平,则会产生上电复位。在VCC上升到VPOR以上并且经过tPOR之后,芯片将从上电状态释放。
上电复位后,RSTSR0中的PORF位置1。引脚复位后,PORF清零。
6.3 独立看门狗定时器复位
这是由独立看门狗定时器(IWDT)产生的内部复位。
当IWDT下溢时,可以选择产生独立看门狗定时器复位(可以改为产生NMI),并且RSTSR1中的IWDTRF位置1。短暂延迟后,将取消IWDT复位。详情请参照《硬件手册》。
6.4 看门狗定时器复位
这是看门狗定时器(WDT)产生的内部复位。
当WDT下溢时,可以选择产生看门狗定时器复位(可以改为产生NMI),并且RSTSR1中的WDTRF位置1。短暂延迟后,将取消WDT复位。详情请参照《硬件手册》。
6.5 电压监视复位
RA2系列包括允许MCU在欠压期间防止不安全操作的电路。板上比较器根据三个参考电压Vdet0、Vdet1和Vdet2检查电源电压。当电源下降到每个参考电压以下时,会产生中断或复位。检测电压Vdet0、Vdet1和Vdet2均可从3个不同大小的值中选择。
当Vcc随后上升到超过Vdet0、Vdet1或Vdet2时,经过稳定时间后,电压监视复位释放将继续。
上电复位后,将禁用低电压检测。可以通过使用选项功能寄存器OFS1来使能电压监视。有关更多详细信息,请参见《硬件手册》中的“低电压检测(LVD)”一章。
LVD复位后,RSTSR0中的LVDnRF(n = 0、1、2)位置1。
6.6 软件复位
这是通过SYSRESETREQ位写入Arm内核的AIRCR寄存器产生的内部复位。当SYSRESETREQ位设为1时,产生软件复位,再经过内部复位时间(tRESW2)后,将取消内部复位,CPU进行复位异常处理。详情请参照MCU硬件手册。
有关SYSRESETREQ位的详细信息,请参照Arm® Cortex®-M23的技术手册。
6.7 其他复位
MCU内的大多数外设功能都可以在特定的故障条件下产生复位。无需硬件配置即可使能这些复位。有关将为每个外设功能产生复位的条件的详细信息,请参见《硬件手册》中的相关章节。
6.8 冷/热启动的确定
借助RA2 MCU,用户可以确定发生复位过程的原因。RSTSR2中的CWSF标志指示是上电复位导致了复位过程(冷启动),还是操作期间输入的复位信号导致了复位过程(热启动)。
发生上电复位时,该标志置0。否则,该标志不会置0。通过软件向该标志写入1时会将其置1。即使在写入0时也不会将其置0。
6.9 确定复位源
借助RA2 MCU,用户可以确定复位信号产生源。读取RSTSR0和RSTSR1,以确定哪个复位是复位源。有关流程图,请参见《硬件手册》中的“复位产生源的确定”部分。
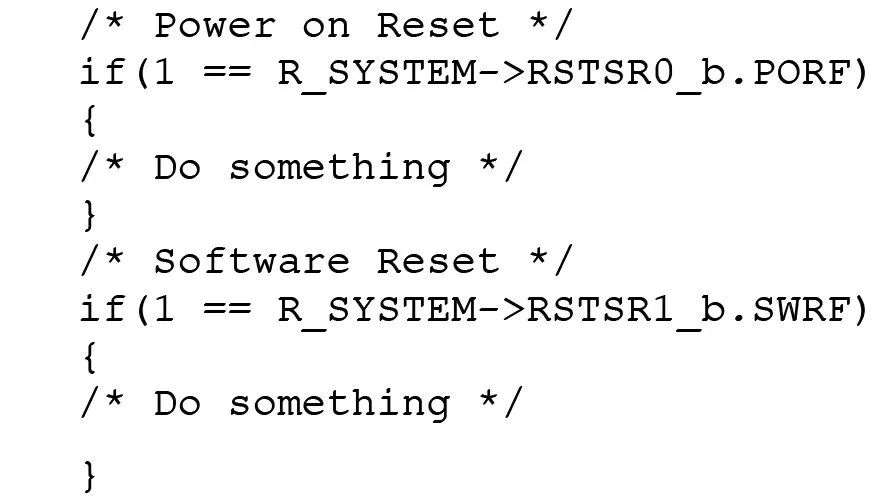
以下代码示例展示了如何使用Renesas FSP中基于CMSIS的寄存器结构确定复位是由软件复位、深度软件待机还是上电复位导致的。
下一章:存储器
推荐阅读
RA2快速设计指南 [2] MCU工作模式和选项设置存储器
RA2快速设计指南 [3] 时钟电路(上)
RA2快速设计指南 [4] 时钟电路(下)




