都有哪些内容?
FPGA固件升级方案
Golden镜像和Multiboot镜像简介
ISE环境下实现(XC6SLX9)
Vivado环境下实现(XC7K325T)
Golden镜像Header分析
参考资料
示例工程
FPGA的硬件可编程性给设计带来了很高的灵活性,基于FPGA的产品也会有更新或升级的需求,而且大多数情况下由于现场环境、人力物力成本的限制,无法通过下载器JTAG方式进行刷新程序,比如机房服务器中的FPGA加速卡或采集卡,无法随便出入机房进行升级,FPGA部署在偏远山区的基站或高高的通信塔台等等场景,现场通过下载器JTAG方式升级固件,一方面影响用户体验和满意度,另一方面又要耗费大量的人力物力。所以就有了FPGA远程更新固件的需求,要满足以下升级要求:
基本的固件升级功能,传输方式可基于常见的通讯协议,如串口、USB、CAN、网口、WiFi、蓝牙、PCIe等协议来实现升级。
基本的防止变砖功能,即在升级过程中任何时刻,出现异常情况,如断电,线缆断开等,都应该能保证重新上电后,还可以再次完成升级流程,防止芯片变砖。
升级流程的优化,可靠的通讯协议,例如握手、校验、应答等等,在满足基本功能的情况下,更高的升级效率。
对于单片机来说,IAP固件升级有非常成熟的应用方案,升级方式也很丰富,尤其是在当前日益丰富的ARM芯片环境下,不同厂家的单片机升级程序之间进行移植也非常方便。
但是对于FPGA来说,IAP升级就比较复杂。目前Xilinx和Altera的FPGA都是基于RAM结构,内部没有Flash存储器,固件程序一般都存储在外置的SPI Flash中,芯片上电之后,会先从Flash中读取数据,并加载到FPGA内部RAM。
在程序加载完成之后,SPI Flash就可以被用户执行读写操作,所以我们只需要在程序中实现对SPI Flash读写控制器就可以达到升级固件的目的。
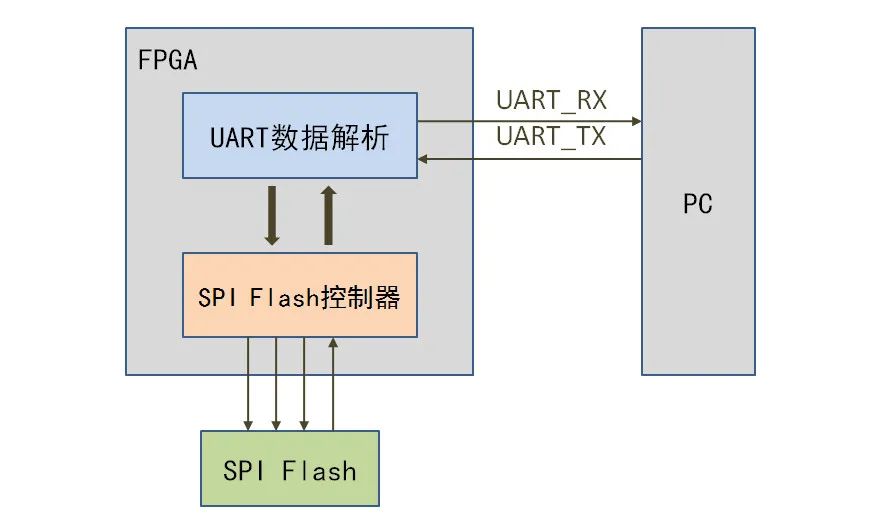
固件通过串口或网口等传输协议发送到FPGA,FPGA将此数据写入到SPI Flash,当完全写入之后,重新上电执行的就是更新之后的程序。
这种方案理论上是可行的,但是有一个很大的风险,一旦在数据写入的过程中断电,或者线缆松动等异常情况发生,就会导致固件程序写入不完整,那么在下次启动时,程序就无法运行,FPGA变砖,拯救的办法还是要通过最原始的下载器JTAG方式来恢复。
那可不可以像单片机那样存储两套固件程序:Bootloader和Application,Bootloader程序永远不会被破坏,从而保证不会变砖。
答案是肯定的,FPGA厂商也考虑到了这个问题,Xilinx 6和7系列FPGA上都提供了双镜像方案,即:Golden镜像和Multiboot镜像,简称为G镜像和M镜像,可以简单理解为单片机的Bootloader和Application程序。
M镜像就是用户程序,G镜像就是为了防止变砖而存在的备用固件,无论出现任何异常情况,都不会破坏G镜像的数据内容,从而可以实现即使升级失败,也不会变砖。
Xilinx FPGA还支持被动加载,即通过外置MCU来提供数据,从而实现程序升级,所以FPGA固件升级问题就转换为单片机的程序文件升级,这种方式无需FPGA设计做任何修改,需要外部增加一颗MCU硬件支持,本文不做介绍。
本文介绍如何创建Golden镜像和Multiboot镜像,以及加载失败Fallback回退的原理。
Multiboot镜像是用户应用程序,Golden镜像是用来保证升级过程中出现错误,设备不会变砖。
那么这两个镜像是如何启动的呢?
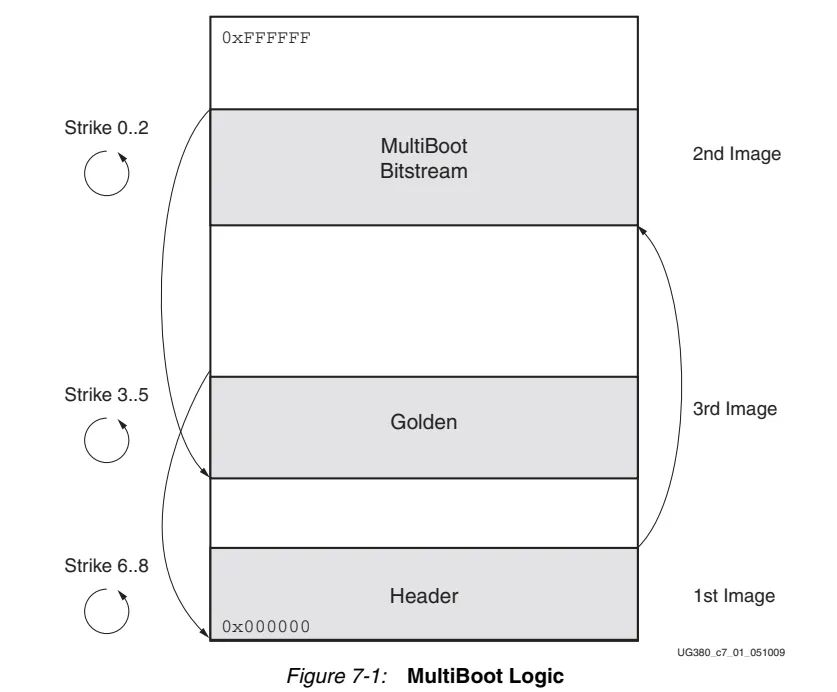
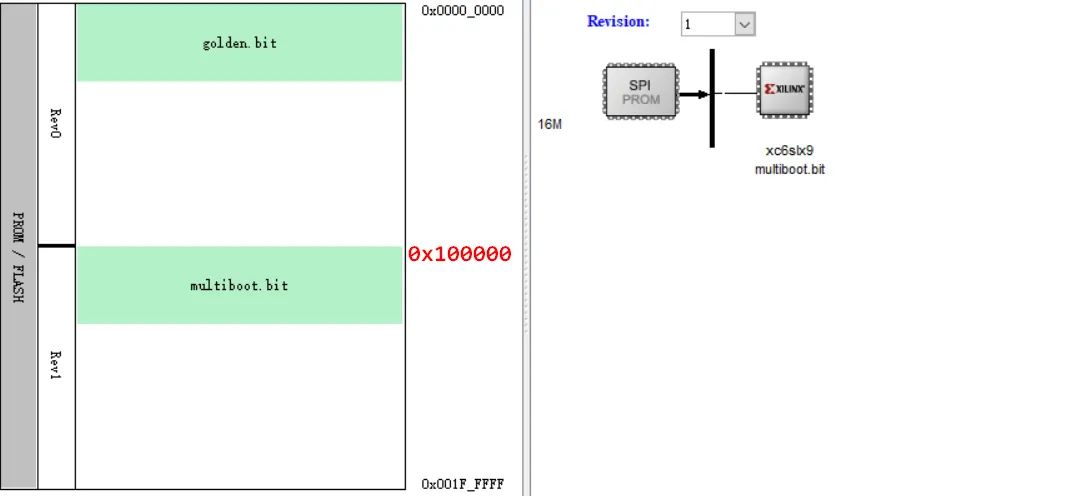
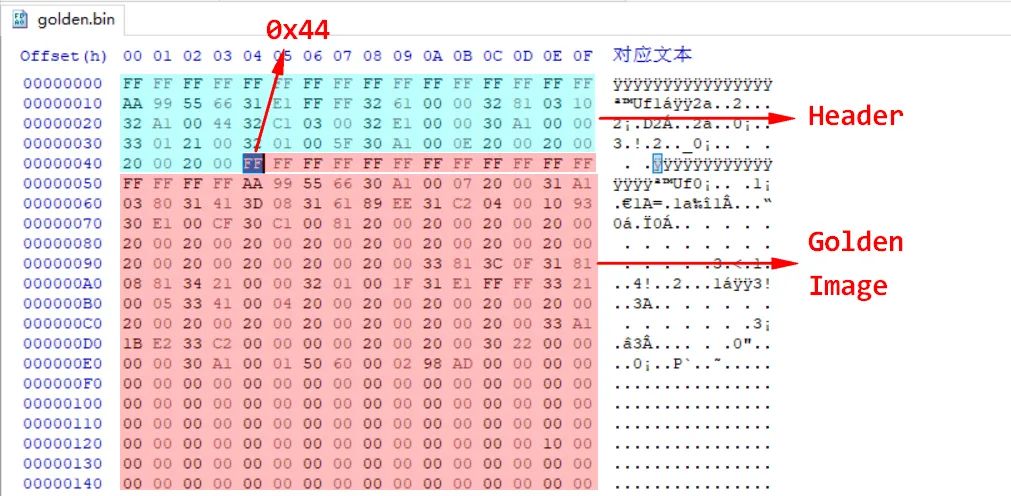
首先Golden镜像的最前面是Header部分,为了方便介绍,还是分为三个部分来介绍:Header、Golden和Multiboot,我们先来看看它们在SPI Flash中的存储顺序,以SPI Flash M25P16为例,存储空间大小是16Mbit(2MByte),地址范围是:0x0-0x1FFFFF
Header位于存储器的头部分,地址范围是0-0x43,其中包括了G镜像和M镜像的24位起始地址。
G镜像位于Header之后,地址范围是:0x44-0xFFFFF
M镜像位于Flash后半部分,地址范围是:0x100000-0x1FFFFF
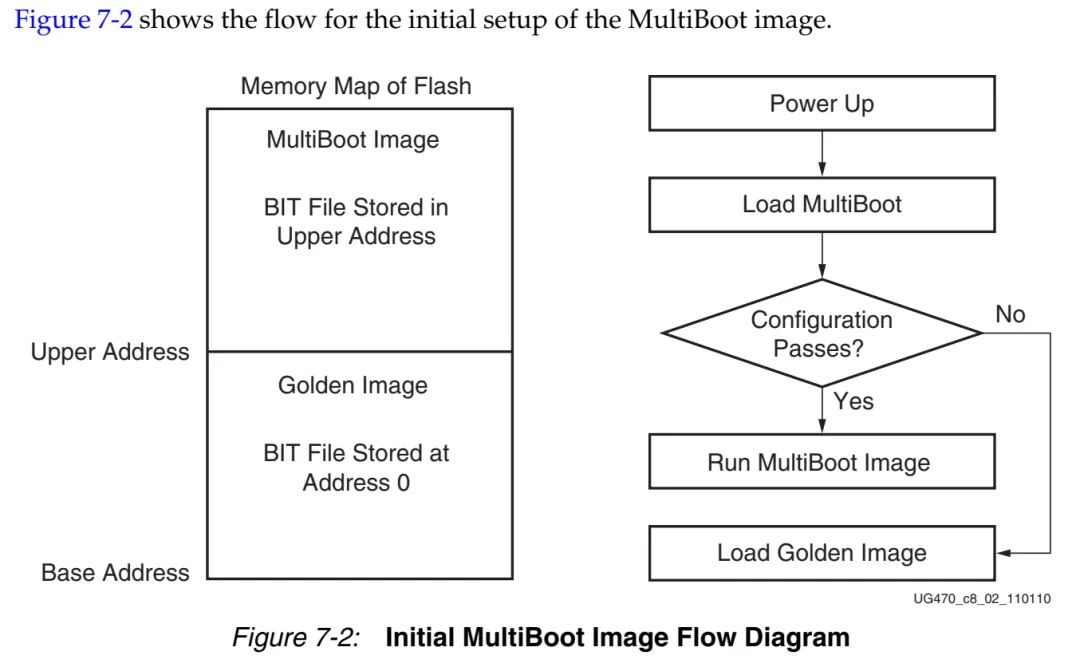
上电后的启动顺序是:
1.执行Header中的命令,Header中指定了Multiboot镜像地址(0x100000),以及Multiboot加载失败后回退地址,即Golden地址(0x44)。
2.跳转到M镜像地址,开始加载M镜像,如果加载成功,则直接运行M镜像
3.如果加载M镜像地址遇到错误,比如没有找到同步字、IDCODE或CRC校验错误,则跳转到Golden镜像地址开始运行。
下图介绍了Xilinx双镜像方案的启动过程:
所以一般的应用方案是:
G镜像实现对M镜像所在的存储区域写操作
M镜像的功能,除了用户逻辑之后,也包括对M镜像自身所在的存储区域进行更新,即自更新。
Golden镜像一旦确定,就不会更改,升级过程中也不会操作G镜像所在的存储区域,这样就可以保证在M镜像加载出错时,G镜像能够正常加载。
下面以正常升级和升级出错,来介绍两个镜像的加载过程:
正常升级:上电后会直接运行M镜像程序,在程序运行过程中,接收到升级指令后,执行对M镜像区域的更新,更新完成后,重新上电,因为此时M镜像存储区的数据已经被更新,所以重新上电后执行的是新的M镜像程序,即可以达到程序升级的功能。
升级出错:当M镜像升级过程中出错时,比如在执行数据写入时断电,此时会导致更新后的M镜像区域不完整,那么在下次重新上电后,M镜像加载失败,会回退到G镜像运行,因为G镜像同样包括更新功能,所以可以对M镜像存储区进行升级,即使升级过程中出错,也不会对G镜像造成影响,下次上电启动仍然可以通过运行G镜像来实现M镜像更新。
接下来分别以XC6SLX9和XC7K325,演示在ISE和Vivado环境下,Golden镜像和Multiboot镜像如何生成。
为了区分G镜像和M镜像运行现象,分别新建两个ISE工程,bit流生成选项都先保持默认配置,G镜像功能为1个LED闪烁,M镜像功能为4个LED闪烁,可以通过观察LED闪烁的个数来区分当前运行的是哪个镜像程序。
下面我们分别针对G镜像和M镜像进行bit流生成选项配置。
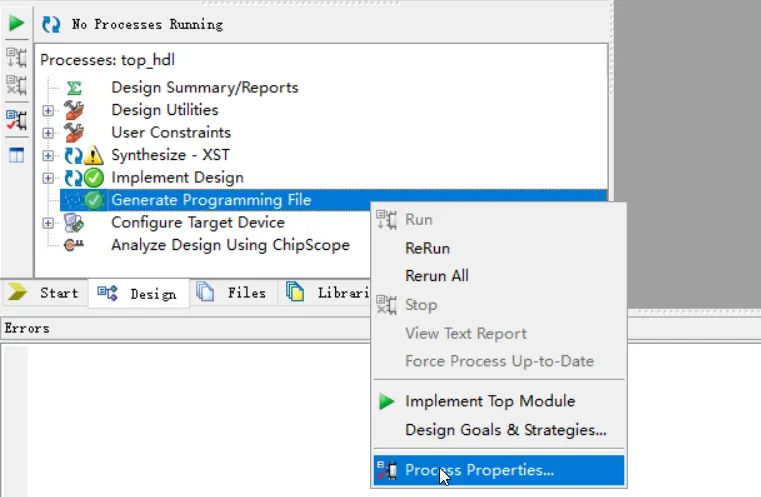
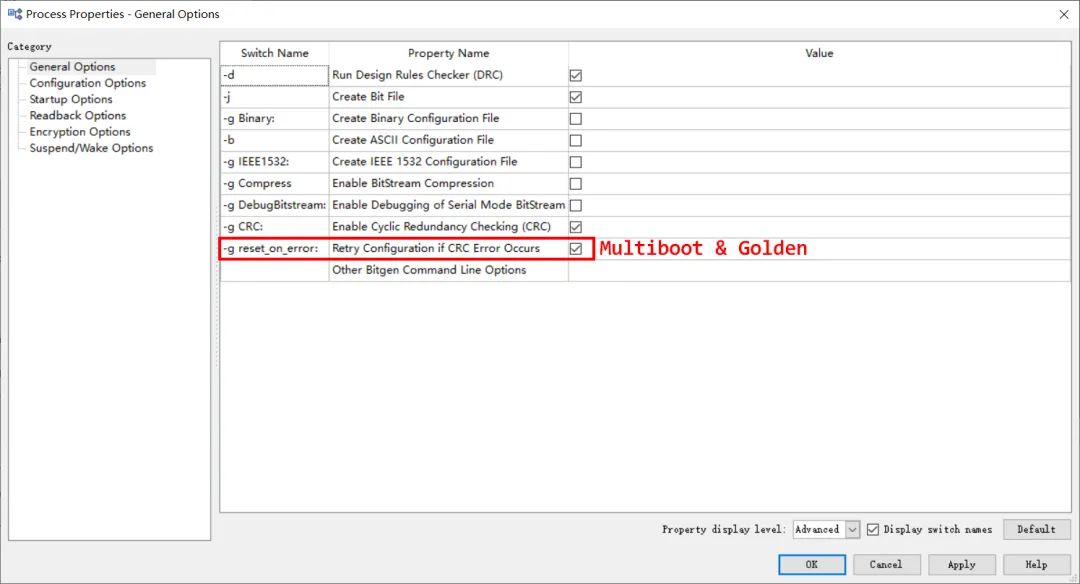
为了保证加载失败时,重新执行配置过程,无论是G镜像还是M镜像都需要使能General Options->Retry Configuration if CRC Error Occurs:
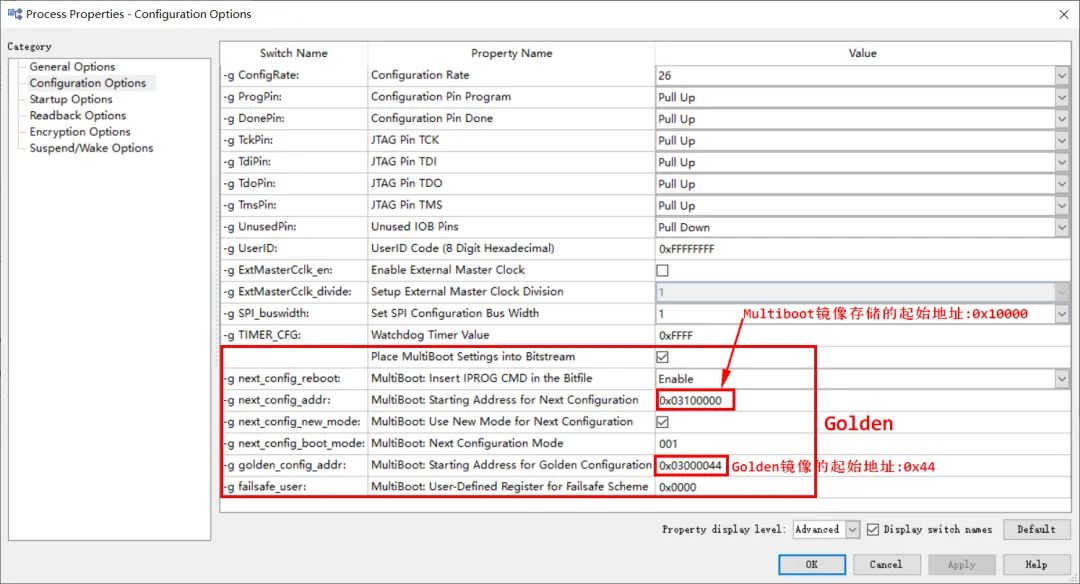
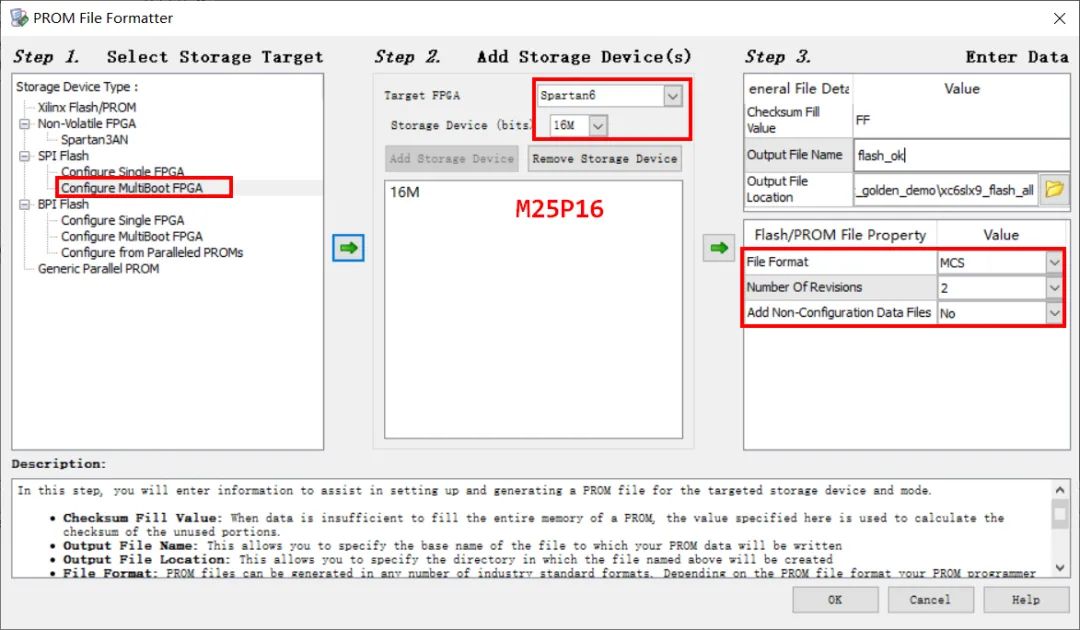
G镜像还需要配置以下两个地方,M镜像的地址需要根据所使用SPI Flash型号进行设置。
我所使用的是M25P16,整个存储区域分为两部分,前半部分存放Header和G镜像(0x44),后半部分存放M镜像,起始地址0x100000。
为什么前面有0x03呢?这是SPI Flash的读操作命令,G镜像的偏移量为什么是0x44呢?因为Header部分数据长度是0x44,G镜像位于Header之后,G镜像的起始地址就是0x44。
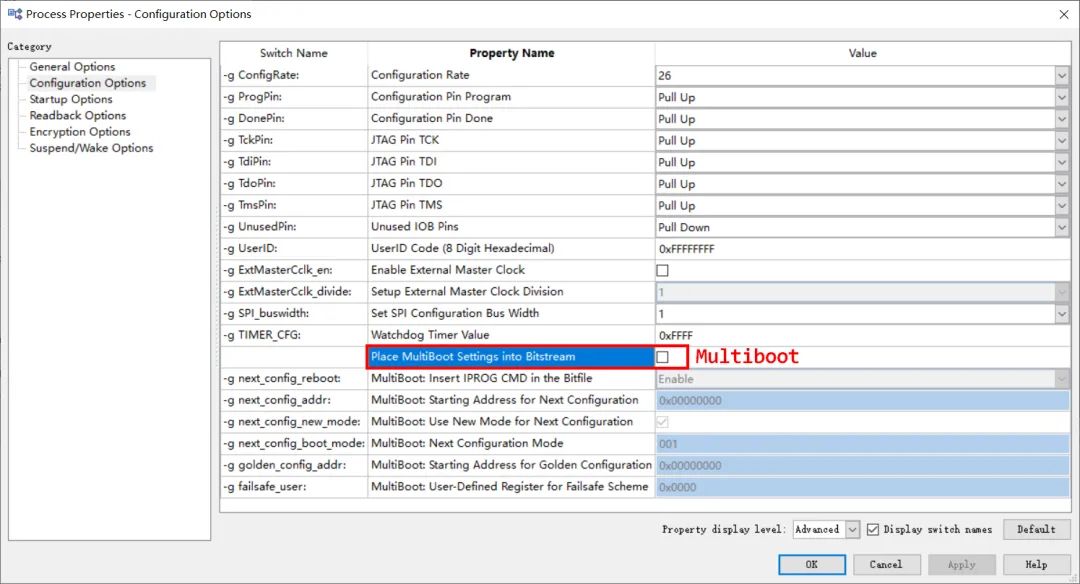
M镜像需要配置以下两个地方:
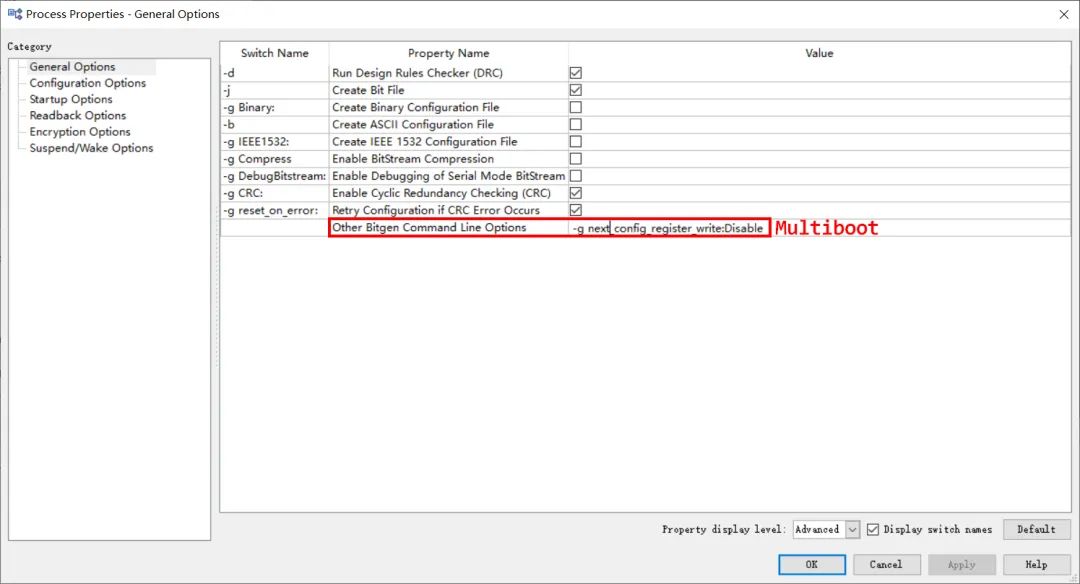
M镜像还要加上一条配置参数:
-g next_config_register_write:Disable
分别编译生成G镜像bit文件和M镜像bit文件。
使用iMPACT合成mcs文件,以M25P16为例,G镜像中已经包含了Header部分,所以选择从0地址开始存储,M镜像从0x100000开始存储。
分别加载对应的bit文件:
mcs文件烧录到FPGA外部Flash之后,通电运行,会发现4颗在LED闪烁,说明当前是M镜像在运行。
也可以通过人为修改M镜像的内容来触发G镜像启动,比如修改G镜像中的IDCODE,或中间的数据部分导致CRC校验错误触发回退。
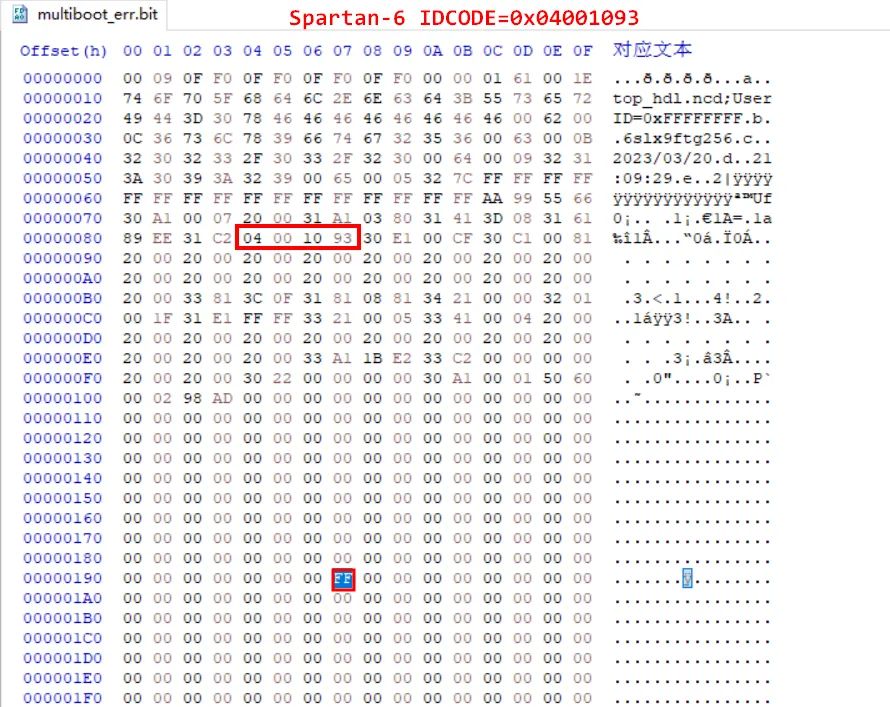
把修改之后错误的M镜像bit文件和G镜像bit文件重新合并成mcs,烧录到FPGA,再次运行,会发现1个LED在闪烁,说明启动M镜像时遇到错误,回退到G镜像运行。
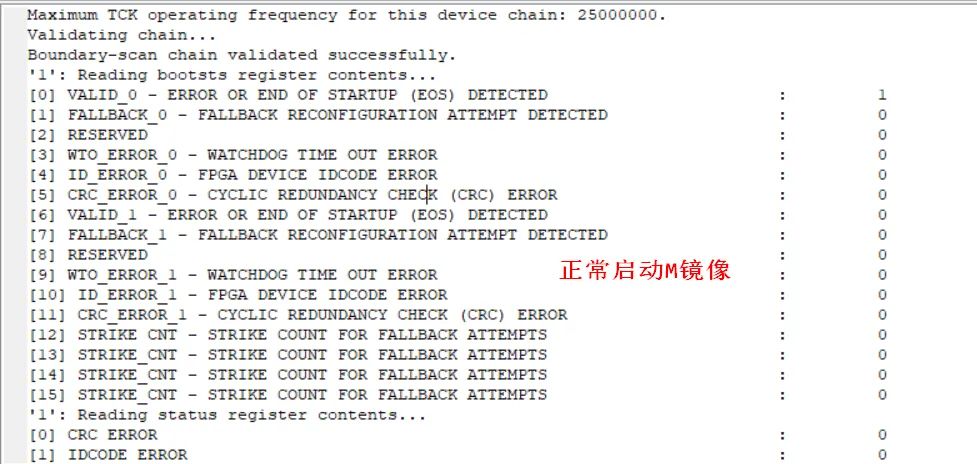
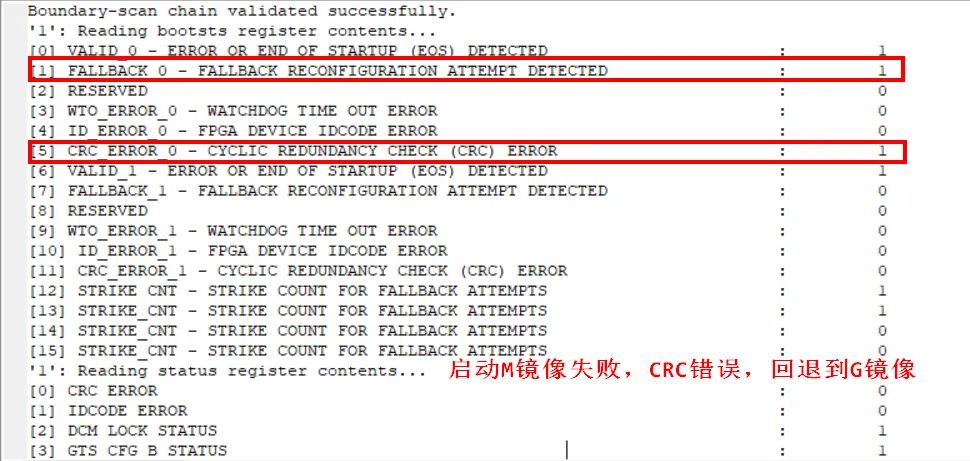
启动之后,也可以通过iMPACT读取状态寄存器来判断是哪种方式触发的回退。
正常的M镜像启动流程:
加载M镜像时遇到CRC错误,启动G镜像:
Vivado和ISE环境略有不同,是在xdc约束文件中分别配置M镜像和G镜像,同样,先建立两个工程,M镜像的功能是4个LED闪烁,G镜像的功能是1个LED闪烁。
无论是G镜像还是M镜像,都需要添加以下QSPI总线宽度、加载时钟频率约束:
# bit stream compression enable
set_property BITSTREAM.GENERAL.COMPRESS TRUE [current_design]
set_property CONFIG_VOLTAGE 3.3 [current_design]
set_property CFGBVS VCCO [current_design]
# qspi flash buswidth=4
set_property BITSTREAM.CONFIG.SPI_BUSWIDTH 4 [current_design]
set_property BITSTREAM.CONFIG.CONFIGRATE 50 [current_design]
G镜像工程要单独添加以下约束,指定M镜像的存储地址0x800000:
# golden工程需要配置以下Multiboot加载的地址:128Mbit/2
set_property BITSTREAM.CONFIG.NEXT_CONFIG_ADDR 32'h00800000 [current_design]
set_property BITSTREAM.CONFIG.NEXT_CONFIG_REBOOT ENABLE [current_design]
M镜像工程要单独添加以下约束:
# multiboot使能fallback功能
set_property BITSTREAM.CONFIG.CONFIGFALLBACK ENABLE [current_design]
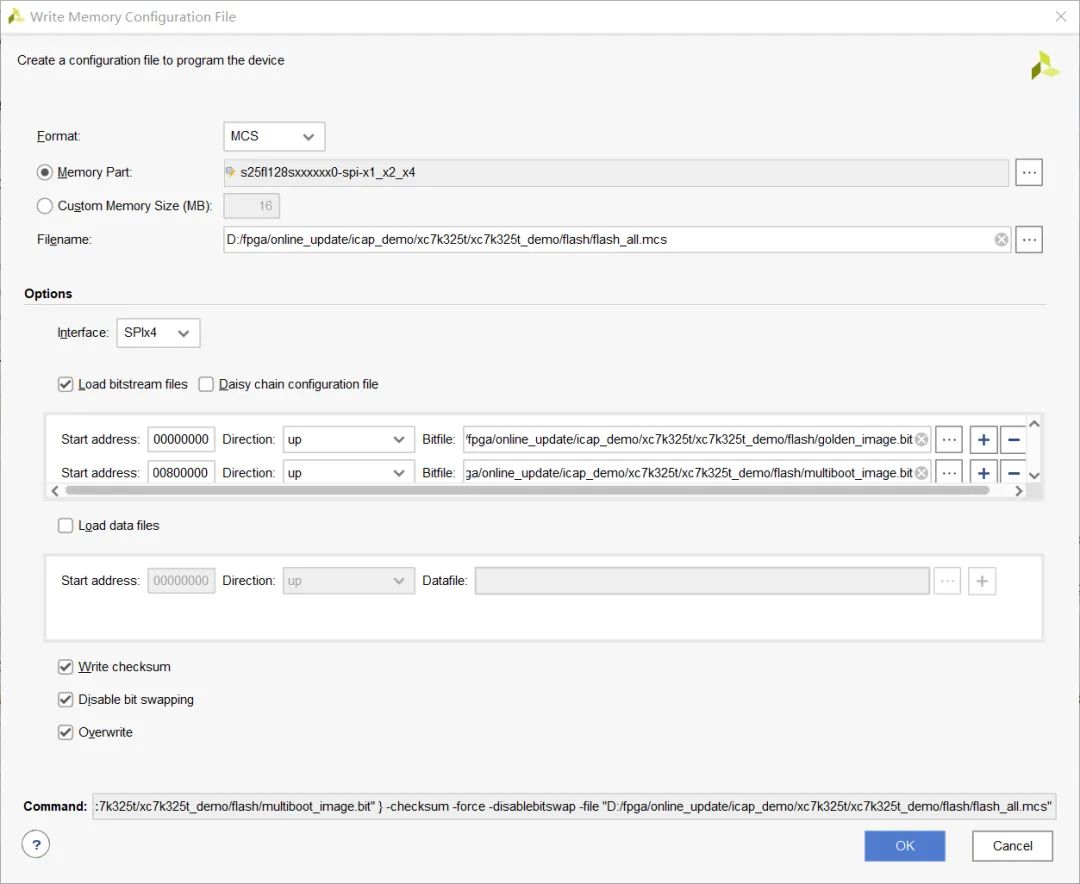
G镜像和M镜像bit文件合并成一个mcs:
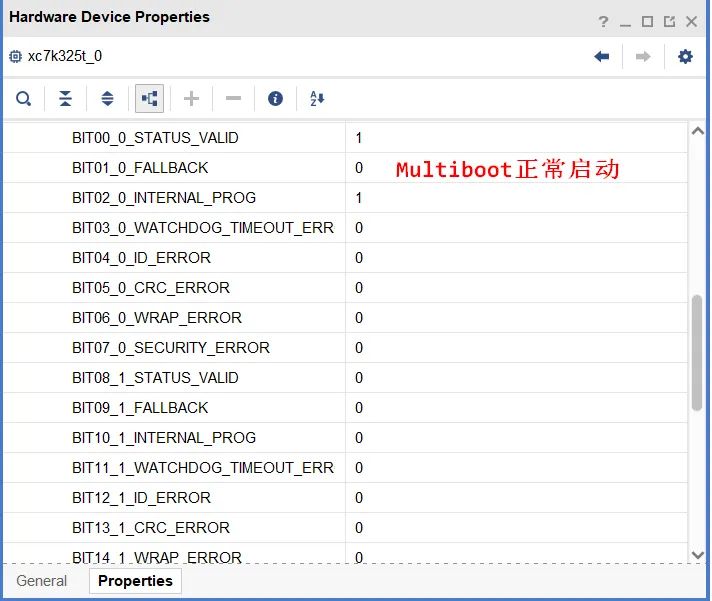
烧录之后会发现4颗LED闪烁,即当前是M镜像运行。
M镜像加载成功的状态寄存器值:
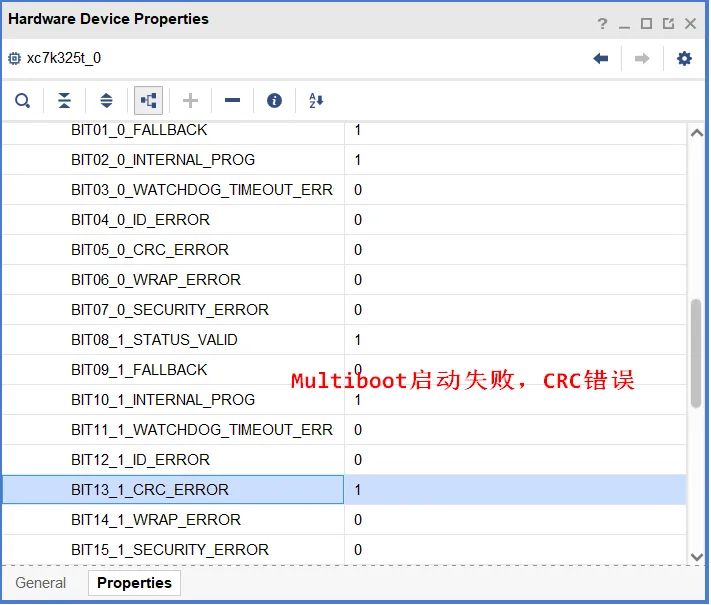
修改M镜像的数据部分,人为造成CRC错误启动G镜像,状态寄存器的值:
下面对ISE环境下生成的G镜像bin文件进行解析,看看G镜像是怎么启动的,Vivado生成的G镜像命令略有不同。
G镜像其实已经包含了Header部分,位于G镜像的前面44个字节,之后才是G镜像部分。
Header部分解析:
/*原始Header数据*/
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF AA 99 55 66 31 E1 FF FF 32 61 00 00 32 81 03 10 32 A1 00 44 32 C1 03 00 32 E1 00 00 30 A1 00 00 33 01 21 00 32 01 00 5F 30 A1 00 0E 20 00 20 00 20 00 20 00
/*Header数据解析*/
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
AA 99 55 66 //Sync Word
31 E1 //WRITE:Configuration Watchdog Timer.
FF FF //0xFFFF
32 61 //WRITE:GENERAL1:M镜像起始地址低16位=0x0000
00 00
32 81 //WRITE:GENERAL2:SPI操作命令0x03(READ), M镜像起始地址高8位=0x10
03 10
32 A1 //WRITE:GENERAL3:G镜像起始地址低16位=0x0044
00 44
32 C1 //WRITE:GENERAL4:SPI操作命令0x03(READ), G镜像起始地址高8位=0x00
03 00
32 E1 //WRITE:User-defined register for fail-safe scheme.
00 00
30 A1 //WRITE:Type 1 Write 1 Word to CMD
00 00
33 01 //WRITE:Reboot mode.
21 00
32 01 //WRITE:House Clean Option register.
00 5F
30 A1 //WRITE:IPROG Command
00 0E //执行完此命令后,跳转到M镜像起始地址开始加载
20 00 //NOP
20 00 //NOP
20 00 //NOP
20 00 //NOP
关于Header部分命令的说明,可以参考文末的官方文档,6系列对应UG380,7系列对应UG470。
可以看出,我们在ISE中G镜像bit生成选项中的配置,比如M镜像地址和G镜像地址,最终体现在G镜像bit文件的Header部分。
UG380_Spartan-6 FPGA Configuration
https://classes.engineering.wustl.edu/cse462/images/9/99/Ug380.pdf
UG470_7 Series FPGAs Configuration
https://www.xilinx.com/support/documentation/user_guides/ug470_7Series_Config.pdf
Spartan6 Mutiboot实现方法记录
https://www.cnblogs.com/cnpirate/p/14030839.html
xapp1247-multiboot-spi.pdf
https://www.xilinx.com/support/documentation/application_notes/xapp1247-multiboot-spi.pdf
xapp1246-multiboot-bpi.pdf
https://www.xilinx.com/support/documentation/application_notes/xapp1246-multiboot-bpi.pdf
xc6slx9_multiboot_golden_demo.rar
https://download.csdn.net/download/whik1194/87615764
xc7k325t_multiboot_golden_demo.rar
https://download.csdn.net/download/whik1194/87615745
国产FPGA开发板上手体验:不足百元,集成ARM硬核处理器!
ZYNQ开发板深度评测:高性能FPGA和双核ARM的强强联合!
Xilinx芯片太贵,我选择国产替代!聊聊国产FPGA芯片选型
如何打造一款高效率的Verilog编辑器
全平台轻量开源verilog仿真工具iverilog+GTKWave使用教程
如何写出易于维护的Verilog代码?
神器你值得拥有——CoolFormat代码一键自动格式化工具,支持Verilog
这个Verilog语法你一定不知道
都说FPGA高端,它到底能干啥?详解六大应用领域!
FPGA固件如何进行在线升级?
开源、低成本的Xilinx FPGA下载器
FPGA硬核和软核处理器的区别
