点击左上方蓝色“混说Linux”,选择“设为星标”
在嵌入式设备应用场景中,系统日志时常可以监控设备软件的运行状态,及时记录问题点以及关键信息,方便开发人员后期定位以及解决问题。本文将讲述一种简易的系统日志记录方法,用于保存设备的系统日志,视具体嵌入式设备情况而定,可存储在MCU内部Flash、外部Flash、EEPROM等,本文采用外部Flash作为示例展开介绍。
实现的效果如下图所示,设置通过指令可查询到整个日志目录区的概况。
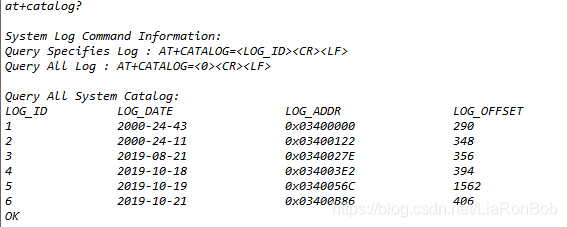
查询指定日期系统日志:AT+CATALOG=
LOG_ID:在查询系统日志目录时获取,当LOG_ID为0时,为查询整个系统日志。

另外提供移除系统日志(清除日志目录)指令:AT+RMLOG,后面将讲述具体实现。
#define FLASH_SECTOR_SIZE ((uint32_t)0x001000)
#define FLASH_BLOCK_32K_SIZE ((uint32_t)0x008000)
#define FLASH_BLOCK_64K_SIZE ((uint32_t)0x010000)
#define SECTOR_MASK (FLASH_SECTOR_SIZE - 1) /*扇区掩码 ------*/
#define SECTOR_BASE(addr) (addr & (~SECTOR_MASK)) /*扇区的基地址 --*/
#define SECTOR_OFFSET(addr) (addr & SECTOR_MASK) /*扇区内的偏移 --*/
#define BLOCK_32K_BASE(addr) (addr & (~(FLASH_BLOCK_32K_SIZE)))
#define BLOCK_64K_BASE(addr) (addr & (~(FLASH_BLOCK_64K_SIZE)))
typedef enum {
FLASH_BLOCK_4K = 0, /**< flash erase block size 4k */
FLASH_BLOCK_32K = 1, /**< flash erase block size 32k */
FLASH_BLOCK_64K = 2 /**< flash erase block size 64k */
}flash_block_t;
/* flash 空间索引 */
typedef enum{
FLASH_CATALOG_ZONE = 0,
FLASH_SYSLOG_PARA_ZONE,
FLASH_SYSLOG_ZONE,
FLASH_ZONEX,
}flash_zone_e;
typedef struct{
flash_zone_e zone;
uint32_t start_address;
uint32_t end_address;
}flash_table_t;
/* 地址划分 */
static const flash_table_t flash_table[] = {
{ .zone = FLASH_CATALOG_ZONE, .start_address = 0x03200000, .end_address = 0x032FFFFF},
{ .zone = FLASH_SYSLOG_PARA_ZONE, .start_address = 0x03300000, .end_address = 0x033FFFFF},
{ .zone = FLASH_SYSLOG_ZONE, .start_address = 0x03400000, .end_address = 0x03FFFFFF},
};Flash底层实现擦除、读写操作接口,由读者自行实现。
flash_table_t *get_flash_table(flash_zone_e zone)
{
int i = 0;
for (i = 0; i < flash_zone_count; i++) {
if (zone == flash_table[i].zone)
return (flash_table_t *)&flash_table[i];
}
return NULL;
}
int flash_erase(flash_zone_e zone, uint32_t address, flash_block_t block_type)
{
flash_table_t *flash_table_tmp = get_flash_table(zone);
if (flash_table_tmp == NULL)
return -1;
if (address < flash_table_tmp->start_address ||address > flash_table_tmp->end_address)
return -1;
return bsp_spi_flash_erase(address, block_type);
}
int flash_write(flash_zone_e zone, uint32_t address, const uint8_t*data, uint32_t length)
{
flash_table_t *flash_table_tmp = get_flash_table(zone);
if (flash_table_tmp == NULL)
return -1;
if ((address < flash_table_tmp->start_address) ||((address + length) > flash_table_tmp->end_address))
return -1;
return bsp_spi_flash_buffer_write(address, (uint8_t *)data, length);
}
int flash_read(flash_zone_e zone, uint32_t address, uint8_t*buffer, uint32_t length)
{
flash_table_t *flash_table_tmp = get_flash_table(zone);
if (flash_table_tmp == NULL)
return -1;
if ((address < flash_table_tmp->start_address) ||((address + length) > flash_table_tmp->end_address))
return -1;
bsp_spi_flash_buffer_read(buffer, address, length);
return 0;
}
typedef struct {
uint16_t Year; /* 年份:YYYY */
uint8_t Month; /* 月份:MM */
uint8_t Day; /* 日:DD */
uint8_t Hour; /* 小时:HH */
uint8_t Minute; /* 分钟:MM */
uint8_t Second; /* 秒:SS */
}time_t;
int bsp_rtc_get_time(time_t *date);参数区应当保证数据的正确性,应加入参数校验存储,定义校验结构体。
#define SYSTEM_LOG_MAGIC_PARAM 0x87654321 /* 日志参数标识符 */
typedef struct {
uint32_t magic; /* 参数标识符 */
uint16_t crc; /* 校验值 */
uint16_t len; /* 参数长度 */
} single_sav_t;参数区需记录当前日志记录的写位置,以及目录项个数,还有日志区和目录区环写状态,并且存储最新时间等等。
/* 日志区参数 */
typedef struct {
uint32_t write_pos; /* 写位置 */
uint32_t catalog_num; /* 目录项个数 */
uint8_t log_cyclic_status; /* 系统日志环形写状态 */
uint8_t catalog_cyclic_status; /* 日志目录环形写状态 */
time_t log_latest_time; /* 存储最新时间 */
}system_log_t;
/* 目录区参数 */
typedef struct {
uint32_t log_id; /* 日志索引 */
uint32_t log_addr; /* 日志地址 */
uint32_t log_offset; /* 日志偏移大小,单位:字节 */
time_t log_time; /* 日志存储时间 */
}system_catalog_t;
/* 系统日志参数 */
typedef struct {
single_sav_t crc_val;
system_log_t system_log;
system_catalog_t system_catalog;
}sys_log_param_t;
typedef struct {
uint8_t system_log_print_enable; /* 系统日志打印使能 */
uint16_t system_log_print_id; /* 打印指定id系统日志 */
uint32_t system_log_param_addr; /* 当前日志写地址 */
} sys_ram_t;
sys_ram_t SysRam;
sys_log_param_t SysLogParam;
sys_ram_t *gp_sys_ram = &SysRam;
sys_log_param_t *gp_sys_log = &SysLogParam;
/* 16位CRC校验高位表 */
static const uint8_t auchCRCHi[]={
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,
0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40
};
/* 16位CRC校验低位表 */
static const uint8_t auchCRCLo[]={
0x00,0xc0,0xc1,0x01,0xc3,0x03,0x02,0xc2,0xc6,0x06,0x07,0xc7,0x05,0xc5,0xc4,0x04,
0xcc,0x0c,0x0d,0xcd,0x0f,0xcf,0xce,0x0e,0x0a,0xca,0xcb,0x0b,0xc9,0x09,0x08,0xc8,
0xd8,0x18,0x19,0xd9,0x1b,0xdb,0xda,0x1a,0x1e,0xde,0xdf,0x1f,0xdd,0x1d,0x1c,0xdc,
0x14,0xd4,0xd5,0x15,0xd7,0x17,0x16,0xd6,0xd2,0x12,0x13,0xd3,0x11,0xd1,0xd0,0x10,
0xf0,0x30,0x31,0xf1,0x33,0xf3,0xf2,0x32,0x36,0xf6,0xf7,0x37,0xf5,0x35,0x34,0xf4,
0x3c,0xfc,0xfd,0x3d,0xff,0x3f,0x3e,0xfe,0xfa,0x3a,0x3b,0xfb,0x39,0xf9,0xf8,0x38,
0x28,0xe8,0xe9,0x29,0xeb,0x2b,0x2a,0xea,0xee,0x2e,0x2f,0xef,0x2d,0xed,0xec,0x2c,
0xe4,0x24,0x25,0xe5,0x27,0xe7,0xe6,0x26,0x22,0xe2,0xe3,0x23,0xe1,0x21,0x20,0xe0,
0xa0,0x60,0x61,0xa1,0x63,0xa3,0xa2,0x62,0x66,0xa6,0xa7,0x67,0xa5,0x65,0x64,0xa4,
0x6c,0xac,0xad,0x6d,0xaf,0x6f,0x6e,0xae,0xaa,0x6a,0x6b,0xab,0x69,0xa9,0xa8,0x68,
0x78,0xb8,0xb9,0x79,0xbb,0x7b,0x7a,0xba,0xbe,0x7e,0x7f,0xbf,0x7d,0xbd,0xbc,0x7c,
0xb4,0x74,0x75,0xb5,0x77,0xb7,0xb6,0x76,0x72,0xb2,0xb3,0x73,0xb1,0x71,0x70,0xb0,
0x50,0x90,0x91,0x51,0x93,0x53,0x52,0x92,0x96,0x56,0x57,0x97,0x55,0x95,0x94,0x54,
0x9c,0x5c,0x5d,0x9d,0x5f,0x9f,0x9e,0x5e,0x5a,0x9a,0x9b,0x5b,0x99,0x59,0x58,0x98,
0x88,0x48,0x49,0x89,0x4b,0x8b,0x8a,0x4a,0x4e,0x8e,0x8f,0x4f,0x8d,0x4d,0x4c,0x8c,
0x44,0x84,0x85,0x45,0x87,0x47,0x46,0x86,0x82,0x42,0x43,0x83,0x41,0x81,0x80,0x40
};
/* 实现crc功能函数 */
static uint16_t CRC16(uint8_t* puchMsg, uint16_t usDataLen)
{
uint8_t uchCRCHi=0xff;
uint8_t uchCRCLo=0xff;
uint16_t uIndex;
while(usDataLen--) {
uIndex=uchCRCHi^*(puchMsg++);
uchCRCHi=uchCRCLo^auchCRCHi[uIndex];
uchCRCLo=auchCRCLo[uIndex];
}
return uchCRCHi<<8|uchCRCLo;
}保存系统日志参数,每实现写日志操作后都需要保存当前的参数值,防止意外丢失。
void save_system_log_param(void)
{
uint32_t i = 0;
uint32_t addr = 0;
uint32_t remainbyte = 0;
uint32_t start_addr;
int len = sizeof(sys_log_param_t);
uint8_t *pdata = (uint8_t *)&SysLogParam;
flash_table_t *flash_tmp = get_flash_table(FLASH_SYSLOG_PARA_ZONE);
/* 校验参数 */
gp_sys_log->crc_val.magic = SYSTEM_LOG_MAGIC_PARAM;
gp_sys_log->crc_val.len = sizeof(sys_log_param_t) - sizeof(single_sav_t);
gp_sys_log->crc_val.crc = CRC16(&pdata[sizeof(single_sav_t)], gp_sys_log->crc_val.len);
start_addr = gp_sys_ram->system_log_param_addr;
/* 剩余内存不够写,则重新从起始地址开始写,实现环形存储功能 */
if ((start_addr + len) > flash_tmp->end_address) {
start_addr = flash_tmp->start_address;
}
gp_sys_ram->system_log_param_addr = start_addr + len;
/* 首地址存储,擦除整个系统日志参数存储区,如果划分的内存较大,可能出现第一次擦写等待时间较长,
但实际应用嵌入式设备应该不会占用太多的内存存储系统日志,只当为辅助使用,有额外应用可自行实现 */
if (flash_tmp->start_address == start_addr) {
/*for (i = flash_tmp->start_address; i < flash_tmp->end_address; i+= FLASH_SECTOR_SIZE)
flash_erase(FLASH_SYSLOG_PARA_ZONE, SECTOR_BASE(i), FLASH_BLOCK_4K);
*/
addr = flash_tmp->start_address;
do {
if ((addr + FLASH_BLOCK_64K_SIZE) <= flash_tmp->end_address) {
flash_erase(FLASH_SYSLOG_PARA_ZONE, BLOCK_64K_BASE(i), FLASH_BLOCK_64K);
addr += FLASH_BLOCK_64K_SIZE;
} else if ((addr + FLASH_BLOCK_32K_SIZE) <= flash_tmp->end_address) {
flash_erase(FLASH_SYSLOG_PARA_ZONE, BLOCK_32K_BASE(i), FLASH_BLOCK_32K);
addr += FLASH_BLOCK_32K_SIZE;
} else if ((addr + FLASH_SECTOR_SIZE) <= flash_tmp->end_address) {
flash_erase(FLASH_SYSLOG_PARA_ZONE, SECTOR_BASE(i), FLASH_BLOCK_4K);
addr += FLASH_SECTOR_SIZE;
} else {
break;
}
} while (addr < flash_tmp->end_address);
}
remainbyte = FLASH_SECTOR_SIZE - (start_addr % FLASH_SECTOR_SIZE);
if (remainbyte > len) {
remainbyte = len;
}
while (1) {
flash_write(FLASH_SYSLOG_PARA_ZONE, start_addr, pdata, remainbyte);
if (remainbyte == len) {
break;
} else {
pdata += remainbyte;
start_addr += remainbyte;
len -= remainbyte;
remainbyte = (len > FLASH_SECTOR_SIZE) ? FLASH_SECTOR_SIZE : len;
}
}
}导入系统日志默认参数接口,初始化默认参数或者移除日志。
void load_system_log_default_param(void)
{
/* 系统日志默认参数 */
/* 目录环写状态标志 */
gp_sys_log->system_log.catalog_cyclic_status = 0x00;
/* 目录项个数 */
gp_sys_log->system_log.catalog_num = 0;
/* 日志环写标志 , 1:环写状态 */
gp_sys_log->system_log.log_cyclic_status = 0;
/* 设置默认值,实际会重新从RTC获取最新时间 */
gp_sys_log->system_log.log_latest_time.Year = 2019;
gp_sys_log->system_log.log_latest_time.Month = 5;
gp_sys_log->system_log.log_latest_time.Day = 8;
gp_sys_log->system_log.log_latest_time.Hour = 13;
gp_sys_log->system_log.log_latest_time.Minute = 14;
gp_sys_log->system_log.log_latest_time.Second = 10;
/* 日志写位置从0开始 */
gp_sys_log->system_log.write_pos = 0;
gp_sys_log->system_catalog.log_addr = 0;
gp_sys_log->system_catalog.log_id = 0;
gp_sys_log->system_catalog.log_offset = 0;
gp_sys_log->system_catalog.log_time.Year = 2019;
gp_sys_log->system_catalog.log_time.Month = 5;
gp_sys_log->system_catalog.log_time.Day = 8;
gp_sys_log->system_catalog.log_time.Hour = 12;
gp_sys_log->system_catalog.log_time.Minute = 12;
gp_sys_log->system_catalog.log_time.Second = 14;
gp_sys_log->crc_val.magic = SYSTEM_LOG_MAGIC_PARAM;
/* 导入默认参数后进行保存 */
save_system_log_param();
}设备开机或者复位都会进行导入系统日志参数操作,恢复日志读写参数,参数区为频繁读写操作区域,每一次写操作都会进行一次偏移,有效的导入参数方法是从参数区结束地址到起始地址进行扫描,扫描不到合法的参数则会导入默认日志参数。
/* 参数初始化,在终端启动时调用 */
int load_system_log_param(void)
{
uint32_t i = 0;
single_sav_t psav;
uint32_t end_addr;
uint32_t interal = sizeof(sys_log_param_t);
int data_len = sizeof(sys_log_param_t) - sizeof(single_sav_t);
uint8_t *pram = (uint8_t *)&SysLogParam;
flash_table_t *flash_tmp = get_flash_table(FLASH_SYSLOG_PARA_ZONE);
end_addr =flash_tmp->end_address - (flash_tmp->end_address - flash_tmp->start_address) % interal;
for (i = end_addr - interal; i > flash_tmp->start_address; i -= interal) {
flash_read(FLASH_SYSLOG_PARA_ZONE, i, (uint8_t *)&psav, sizeof(single_sav_t));
if ((psav.magic == SYSTEM_LOG_MAGIC_PARAM) && (psav.len ==data_len)) {
flash_read(FLASH_SYSLOG_PARA_ZONE, i + sizeof(single_sav_t), &pram[sizeof(single_sav_t)], data_len);
if (psav.crc != CRC16(&pram[sizeof(single_sav_t)], data_len))
continue;
gp_sys_ram->system_log_param_addr = i;
log_info("Load System Log Param Addr[0x%08x]!", gp_sys_ram->system_log_param_addr);
return 0;
}
}
/* 扫描不到合法的参数,导入默认系统日志参数 */
load_system_log_default_param();
/* 获取日志写地址 */
gp_sys_ram->system_log_param_addr = flash_tmp->start_address;
log_info("Load System Log Param Addr(Default)[0x%08x]!", gp_sys_ram->system_log_param_addr);
return 1;
}读写系统日志目录接口,读写指定日志索引目录信息。实际实现会定义最新的目录信息存储在日志参数区,当日期发生改变,则表示当前目录信息已经完结,将最新的目录信息录入日志目录区保存,最多每天写入一次目录区。
/* 读取日志目录区指定日志索引目录信息 */
int system_catalog_read(system_catalog_t *catalog, uint32_t id)
{
uint32_t addr;
int rlen = sizeof(system_catalog_t);
uint8_t *pbuf = (uint8_t *)catalog;
flash_table_t *flash_tmp = get_flash_table(FLASH_CATALOG_ZONE);
if (0 == id)
return -1;
addr = flash_tmp->start_address + (rlen * (id - 1));
if (addr > flash_tmp->end_address)
return -1;
return flash_read(FLASH_CATALOG_ZONE, addr, pbuf, rlen);
}
/* 写日志目录区目录信息 */
int system_catalog_write(system_catalog_t *catalog, uint32_t id)
{
uint32_t start_offset;
uint32_t start_addr;
uint32_t start_base;
uint32_t remainbyte;
int wlen = sizeof(system_catalog_t);
uint8_t *pdata = (uint8_t *)catalog;
flash_table_t *flash_tmp = get_flash_table(FLASH_CATALOG_ZONE);
if (0 == id) return -1;
start_addr = flash_tmp->start_address + wlen * (id - 1);
if ((start_addr + wlen) > flash_tmp->end_address) {
start_addr = flash_tmp->start_address;
}
/* 本扇区剩余空间大小 */
remainbyte = FLASH_SECTOR_SIZE - (start_addr % FLASH_SECTOR_SIZE);
/* 写入数据长度小于本扇区剩余长度,直接写入 */
if (remainbyte > wlen) {
remainbyte = wlen;
}
/* 写目录次数不会太频繁,视具体情况改写操作实现 */
while (1) {
start_base = SECTOR_BASE(start_addr);
start_offset = SECTOR_OFFSET(start_addr);
flash_read(FLASH_CATALOG_ZONE, start_base, sector_buf, FLASH_SECTOR_SIZE);
flash_erase(FLASH_CATALOG_ZONE, start_base, FLASH_BLOCK_4K);
memcpy((char *)§or_buf[start_offset], pdata, remainbyte);
flash_write(FLASH_CATALOG_ZONE, start_base, sector_buf, FLASH_SECTOR_SIZE);
if (remainbyte == wlen) {
break;
} else {
pdata += remainbyte;
start_addr += remainbyte;
wlen -= remainbyte;
remainbyte = (wlen > FLASH_SECTOR_SIZE) ? FLASH_SECTOR_SIZE : wlen;
}
}
return 0;
}打印系统日志目录区信息,可实现通过指令查询到目录区信息。
int system_catalog_all_print(void)
{
int i = 0;
system_catalog_t catalog;
printf("System Log Command Information:\r\n");
printf("Query Specifies Log : AT+CATALOG=\r\n"
printf("Query All Log : AT+CATALOG=<0>\r\n\r\n"
printf("Query All System Catalog:\r\n");
printf("LOG_ID LOG_DATE LOG_ADDR LOG_OFFSET \r\n");
for (i = 0; i < gp_sys_log->system_log.catalog_num; i++) {
/* 当前最新目录信息 */
if (i == (gp_sys_log->system_catalog.log_id - 1)) {
catalog = gp_sys_log->system_catalog; /* 获取当前最新目录信息 */
} else {
system_catalog_read(&catalog, i + 1);
}
printf("%d %04d-%02d-%02d 0x%08X %d \r\n",
catalog.log_id, catalog.log_time.Year, catalog.log_time.Month, catalog.log_time.Day,
catalog.log_addr, catalog.log_offset);
memset((char *)&catalog, 0, sizeof(system_catalog_t));
}
return 0;
}读取指定日志目录索引信息接口,可指定日志索引或者读取全部日志数据。
int system_log_task(int argc)
{
int rlen = 0;
uint32_t offset, start_addr, end_addr;
system_catalog_t catalog;
flash_table_t *flash_tmp =get_flash_table(FLASH_SYSLOG_ZONE);
if (0 == gp_sys_ram->system_log_print_enable)
return 1;
gp_sys_ram->system_log_print_enable = 0x00;
if (gp_sys_ram->system_log_print_id == ALL_LOG_PRINT) {
/* log回环写标志,打印整个LOG存储区 */
if (0x01 == gp_sys_log->system_log.log_cyclic_status) {
start_addr = flash_tmp->start_address;
end_addr = flash_tmp->end_address;
offset = end_addr - start_addr;
} else {
start_addr = flash_tmp->start_address;
end_addr = start_addr + gp_sys_log->system_log.write_pos;
offset = gp_sys_log->system_log.write_pos;
}
} else { /* 读取指定ID日志 */
if (gp_sys_ram->system_log_print_id == gp_sys_log->system_catalog.log_id) {
catalog = gp_sys_log->system_catalog;
} else {
system_catalog_read(&catalog, gp_sys_ram->system_log_print_id);
}
start_addr = catalog.log_addr;
offset = catalog.log_offset;
}
if (0 == offset)
return 1;
while (1) {
rlen = (offset > 512) ? 512 : offset;
system_log_read(sector_buf, start_addr, rlen);
HAL_Delay(80);
/* 目录信息通过调式串口打印 */
bsp_debug_send(sector_buf, rlen);
start_addr += rlen;
offset -= rlen;
if (0 == offset)
break;
}
return 0;
}存储系统日志接口,实现更新存储日期,当写位置为扇区地址,则擦除一个扇区作为存储日志,这样避免每写一次就擦除一次。
int system_log_write(uint8_t *wbuf, int wlen)
{
uint32_t start_addr;
uint8_t *pdata = wbuf;
uint32_t remainbyte;
int system_catalog_max_id;
flash_table_t *flash_tmp =get_flash_table(FLASH_SYSLOG_ZONE);
/* 计算目录区的最大存储目录项个数 */
system_catalog_max_id = ((flash_tmp->end_address - flash_tmp->start_address) / sizeof(system_catalog_t));
start_addr = flash_tmp->start_address + gp_sys_log->system_log.write_pos;
/* 存储数据地址大于规划内存地址范围处理 */
if ((start_addr + wlen) > flash_tmp->end_address) {
start_addr = flash_tmp->start_address;
/* 写位置偏移量重置 */
gp_sys_log->system_log.write_pos = 0;
/* LOG回环存储标志置位 */
gp_sys_log->system_log.log_cyclic_status = 0x01;
}
/* 写位置偏移 */
gp_sys_log->system_log.write_pos += wlen;
if ((gp_sys_log->system_log.log_latest_time.Year != gp_sys_log->system_catalog.log_time.Year) ||
(gp_sys_log->system_log.log_latest_time.Month != gp_sys_log->system_catalog.log_time.Month) ||
(gp_sys_log->system_log.log_latest_time.Day != gp_sys_log->system_catalog.log_time.Day)) {
/* 日期改变,记录目录信息,当log_id为0,则不写入 */
system_catalog_write(&gp_sys_log->system_catalog, gp_sys_log->system_catalog.log_id);
/* 记录存储日期 */
gp_sys_log->system_catalog.log_time = gp_sys_log->system_log.log_latest_time;
if ((gp_sys_log->system_catalog.log_id + 1) >= system_catalog_max_id) {
gp_sys_log->system_log.catalog_num = system_catalog_max_id; /* 目录循环写,目录数应为最大 */
gp_sys_log->system_log.catalog_cyclic_status = 1; /* 目录回环写标志 */
} else {
if (0 == gp_sys_log->system_log.catalog_cyclic_status) {
/* 获取目录数 */
gp_sys_log->system_log.catalog_num = gp_sys_log->system_catalog.log_id + 1;
}
}
/* 存储最新目录项信息 */
gp_sys_log->system_catalog.log_id = (gp_sys_log->system_catalog.log_id + 1) % system_catalog_max_id;
gp_sys_log->system_catalog.log_addr = start_addr;
gp_sys_log->system_catalog.log_offset = wlen;
} else {
gp_sys_log->system_catalog.log_offset += wlen;
}
/* 写位置为存储起始地址并且不为扇区首地址 */
if ((flash_tmp->start_address == start_addr) && (SECTOR_OFFSET(flash_tmp->start_address))){
flash_read(FLASH_SYSLOG_ZONE, SECTOR_BASE(start_addr), sector_buf, FLASH_SECTOR_SIZE);
flash_erase(FLASH_SYSLOG_ZONE, SECTOR_BASE(start_addr), FLASH_BLOCK_4K);
/* 将扇区头部至起始地址区间的数据回写 */
flash_write(FLASH_SYSLOG_ZONE, SECTOR_BASE(start_addr), §or_buf[0], SECTOR_OFFSET(start_addr));
}
/* 写位置为扇区首地址,则擦除一个扇区的存储区 */
if (0 == SECTOR_OFFSET(start_addr)) {
flash_erase(FLASH_SYSLOG_ZONE, SECTOR_BASE(start_addr), FLASH_BLOCK_4K);
}
/* 本扇区剩余空间大小 */
remainbyte = FLASH_SECTOR_SIZE - (start_addr % FLASH_SECTOR_SIZE);
/* 写入数据长度小于本扇区剩余长度,直接写入 */
if (remainbyte > wlen) {
remainbyte = wlen;
}
while (1) {
flash_write(FLASH_SYSLOG_ZONE, start_addr, pdata, remainbyte);
if (remainbyte == wlen) {
break;
} else {
pdata += remainbyte;
start_addr += remainbyte;
wlen -= remainbyte;
remainbyte = (wlen > FLASH_SECTOR_SIZE) ? FLASH_SECTOR_SIZE : wlen;
/* 扇区首地址则擦除整个扇区,该扇区数据不保存 */
if (0 == SECTOR_OFFSET(start_addr)) {
flash_erase(FLASH_SYSLOG_ZONE, SECTOR_BASE(start_addr), FLASH_BLOCK_4K);
}
}
}
/* 环形存储参数 */
save_system_log_param();
return 0;
}#define LOG_CLOSE_LEVEL 0x00 /* 关闭调试信息 */
#define LOG_ERROR_LEVEL 0x01 /* 错误调试信息 */
#define LOG_WARN_LEVEL 0x02 /* 警告调试信息 */
#define LOG_INFO_LEVEL 0x03 /* 关键调试信息 */
#define LOG_DEBUG_LEVEL 0x04 /* debug调试信息 */
#define LOG_RECORD_LEVEL 0x10 /* 保存日志并输出信息 */
#define LOG_PRINT_LEVEL 0xff
#define SET_LOG_LEVEL(LEVEL) (gp_sys_param->system_print_level = LEVEL)
#define GET_LOG_LEVEL() (gp_sys_param->system_print_level)
#define log_debug(fmt, args...) log_format(LOG_DEBUG_LEVEL, fmt, ##args)
#define log_info(fmt, args...) log_format(LOG_INFO_LEVEL, fmt, ##args)
#define log_warn(fmt, args...) log_format(LOG_WARN_LEVEL, fmt, ##args)
#define log_error(fmt, args...) log_format(LOG_ERROR_LEVEL, fmt, ##args)
#define log_record(fmt, args...) log_format(LOG_RECORD_LEVEL, fmt, ##args)
#define printf(fmt, args...) log_format(LOG_PRINT_LEVEL, fmt, ##args)
typedef struct {
int level;
char *fmt_str;
}system_print_fmt_t;
system_print_fmt_t system_print_fmt_list[] = {
{ .level = LOG_ERROR_LEVEL, .fmt_str = ":" },
{ .level = LOG_WARN_LEVEL, .fmt_str = ":" },
{ .level = LOG_INFO_LEVEL, .fmt_str = ":" },
{ .level = LOG_DEBUG_LEVEL, .fmt_str = ":" },
{ .level = LOG_RECORD_LEVEL, .fmt_str = ":" },
};
int log_format(uint8_t level, const char *fmt, ...)
{
#define TIME_PREFIX_SIZE (21)
#define PRINT_MAX_SIZE (1024 + TIME_PREFIX_SIZE)
va_list args;
int num = 0, i = 0, fmt_index = 0;
int fmt_str_len = 0, ret = -1;
int file_str_len = 0, line_str_len = 0;
char line_buf[20] = {0};
static char buf[PRINT_MAX_SIZE];
static QueueHandle_t sem = NULL;
time_t time = {0};
/* 针对os系统 */
if (NULL == sem) {
sem = xSemaphoreCreateCounting(1, 1); /* always think of success */
}
xSemaphoreTake(sem, portMAX_DELAY);
ret = -1;
fmt_str_len = 0;
if (level != LOG_PRINT_LEVEL) {
if ((GET_LOG_LEVEL() < level) && (level != LOG_RECORD_LEVEL) && (level != LOG_ERROR_LEVEL))
goto exit_end;
for (i = 0; i < SYSTEM_PRINT_FMT_LIST_MAX; i++) {
if (level == system_print_fmt_list[i].level) {
fmt_index = i;
break;
}
}
if (i > SYSTEM_PRINT_FMT_LIST_MAX) {
goto exit_end;
}
fmt_str_len = strlen(system_print_fmt_list[fmt_index].fmt_str);
strncpy((char *)&buf[TIME_PREFIX_SIZE], system_print_fmt_list[fmt_index].fmt_str, fmt_str_len);
}
va_start(args, fmt);
num = vsnprintf((char *)&buf[fmt_str_len + TIME_PREFIX_SIZE], PRINT_MAX_SIZE - fmt_str_len - TIME_PREFIX_SIZE - 2, fmt, args);
va_end(args);
if (num <= 0) {
goto exit_end;
}
if (level != LOG_PRINT_LEVEL) {
num += fmt_str_len;
buf[num + TIME_PREFIX_SIZE] = '\r';
buf[num + TIME_PREFIX_SIZE + 1] = '\n';
num += 2;
}
if ((GET_LOG_LEVEL() < level) && (level == LOG_ERROR_LEVEL)) {
//do nothing
} else {
ret = bsp_debug_send((uint8_t*)&buf[TIME_PREFIX_SIZE], num);
}
if ((LOG_ERROR_LEVEL == level) || (LOG_RECORD_LEVEL == level)) {
bsp_rtc_get_time(&time);
sprintf(&buf[0], "[%04d-%02d-%02d %02d:%02d:%02d",
time.Year, time.Month, time.Day,time.Hour, time.Minute, time.Second);
buf[TIME_PREFIX_SIZE - 1] = ']';
gp_sys_log->system_log.log_latest_time = time;
system_log_write((uint8_t *)buf, num + TIME_PREFIX_SIZE);
}
exit_end:
xSemaphoreGive(sem);
return ret;
}
原文:http://t.csdn.cn/gFDSG
本文系网络转载,版权归原作者所有,如有侵权,请联系删除。

往期推荐
