

摘要
《中国制造2025》国家战略将智能网联汽车作为重点(ICV)实现汽车行业的智能化和互联化转型升级,迎来前所未有的发展机遇。ICV行业有两种技术路径:单车智能和车辆基础设施协同。两国都面临技术创新效率低下的问题,解决这一问题的关键是打破企业之间的壁垒,实现跨界协同创新。本研究以汽车企业和技术平台提供商为核心,为ICV产业提供了新的跨界协同创新发展范式。本研究利用系统动力学方法研究了关键参数的变化对演化结果的影响,分析了ICV行业跨境协同创新的效率。仿真结果显示,跨界协同创新是ICV产业发展的必然趋势。此外,与单车智能场景相比,车-基础设施协作场景显示了汽车企业和技术平台供应商之间更快的融合。最后,系统协同创新策略的选择受默认成本和协同创新风险系数的影响,而成本分担系数和网络连接费仅对ICV行业跨界协同创新系统的演化速率有影响。
索引词
智能互联汽车,跨界协同创新,单车智能,车辆与基础设施协作,系统动力学。
由于新一轮全球技术革命和行业的实质性变化,汽车行业已进入电气化、网络化、智能化转型的关键发展阶段。智能网联汽车(ICV)有机地融合了远程信息处理和智能汽车,在中国的《中国制造2025》国家战略下被提升为国家战略,迎来了新的发展潜力。
目前,具有智能网络功能的新车的全球市场渗透率约为45%,而到2025年,预计将达到约60%。2025年,中国ICV的市场渗透率预计将超过75%,大于全球市场的装配率[1]。然而,在ICV成为体现产业升级路径和汽车技术未来发展趋势的战略高点的同时,技术路径不清晰、企业转型升级缺乏足够活力等问题对ICV产业的影响更为突出[2]。
在大多数国家,ICV部门遵循两条技术路线之一:单车智能(SVI)或车辆-基础设施协作(VIC)[3]。谷歌于2009年在美国率先启动了自动驾驶的研究和开发(R&D),近年来该技术已逐渐商业化[4]。
然而,随着自动驾驶汽车在汽车市场上的出现,SVI的高价格和安全受限的缺点也日益显现出来[5]。根据麻省理工学院在2020年发布的一项评估,基于SVI的技术发展路线至少需要10年才能实现大规模的产业化。国际中心系统就是在这种背景下创建的,作为SVI的一种高级发展形式。通过在车侧感知的基础上增加路侧感知,车路协调的技术路径改善了人、车、路之间的耦合关系。
它还实现了人-车-路-云的协同感知和决策[6],保证了自主驾驶的安全性[7];将车辆方面的部分成本转移到路边,加快了智能网联汽车的应用[8]。
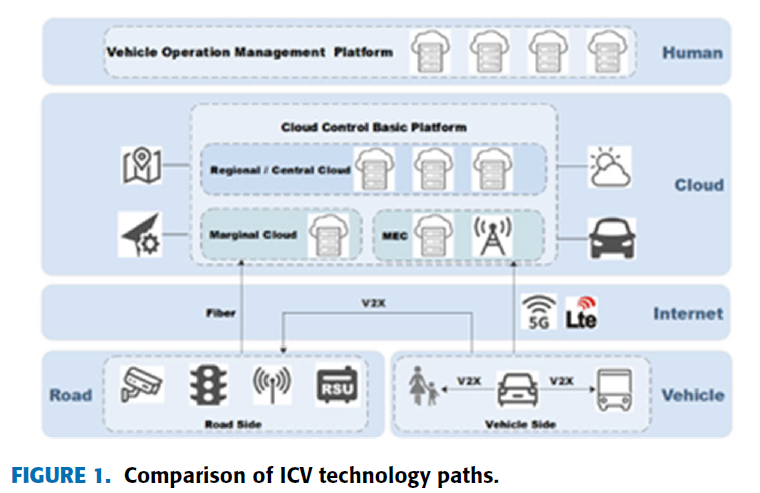
此外,其安装的车辆外部信息交互装置(V2X:车辆到一切)可以用来链接车辆与环境,例如,蘑菇汽车联盟从车辆和道路两个角度协助衡阳市发展智能交通系统,采用车-基础设施合作的技术路径和智能交通AI云平台的全套方案[9],不仅提升了衡阳市的交通安全,也提高了衡阳市的效益[10]。图1显示了SVI和VIC的技术路径的比较。
智能互联市场行业的外部生态建设是基于信息通信技术巨头,如百度、腾讯、阿里等,拥有广泛的用户生态覆盖,以及人工智能和大数据等前沿技术[11]。作为技术平台供应商,这些企业与传统汽车产业链上的公司在车联网、自动驾驶解决方案、高精度定位和其他领域密切合作,帮助加快ICV的产业化。
例如,上汽集团与张江高科和阿里合作成立了吉吉汽车;吉利和百度成立了Pixel-J汽车有限公司;和一汽与阿里结成战略伙伴关系,开发斑马线智能系统,以开发未来一代汽车。
根据中国知识产权局的数据,百度、华为、谷歌和其他互联网企业已经在精密传感器、环境感知、云平台和其他领域的学科中提交了多项专利申请,显示出他们出色的研发能力。根据HIS Markit的数据,在未来3年内,配备BAT智能互联网连接服务的新汽车数量将以大约15%的复合年增长率增长。
这项研究的主要重点是如何鼓励汽车制造商和技术平台供应商之间的合作变革,以及如何确定最佳技术路径。本研究讨论了以下问题。
(1)汽车制造商和技术平台供应商沿着不同的技术路径进行智能网络的协同转型和升级,其动态演变过程是什么?
(2) 哪些因素会影响双方的合作创新?这些问题的答案对于提高ICV的规模和产业化程度至关重要。
为研究这些问题,本研究建立了以传统汽车企业和以科技公司为代表的技术平台提供商为主体的演化对策模型;构建了因果循环图,研究汽车产业智能互联转型过程中协同转型的动态演变规律;并通过调整参数值建立了两个SVI和VIC系统动力学模型进行仿真。我们旨在分析和探讨哪些技术路径可以有效地促进双方的合作,以及哪些因素会影响汽车企业和技术平台供应商的合作。
本文的其余部分组织如下。第二节给出了相关研究的概述。第三节介绍了进化对策理论模型和进化稳定性策略分析。在第四节中,我们建立了一个系统动力学模型来模拟ICV跨境协同创新游戏系统,然后对关键影响参数进行了敏感性分析。第五部分讨论了结论、政策建议和未来工作。
由于ICV流行的时间不长,目前的研究大多集中在对新产业的洞察和技术路径分析。在对ICV新产业的洞察方面,冯[12]指出,基于中国庞大的汽车和互联网行业的产业背景,ICV跨界合作开发比传统的独立研发具有更大的发展优势和现实意义。
有学者进一步提出了汽车企业与技术平台商之间的跨界协同创新模式,可以提高产业间的有益互动,优化资源配置,产生显著的信息系统效益,加快ICV产业的高端转型升级[13]。因此,Li等人[14]建议政府努力改善外部生态环境,促进ICV的协同发展。
国家ICV联合创新中心和国家ICV基础数据平台,除了政策和资金支持外,还需要通过大数据分析、云计算、人工智能等信息技术手段,及时捕捉市场和消费者的需求偏好,更好地推动ICV的产业化和规模化发展[15]。根据以往的研究,跨界融合和协同创新对中国ICV产业的规模发展至关重要,但这些研究大多是从宏观和静态的角度进行的,无法准确反映ICV跨界协同创新的微观动态发展过程。
在ICV发展技术路径识别方面,关于SVI和VIC的争论还没有达成共识:一些学者认为,带有路边传感设备的VIC比SVI能感知更多的信息[16];例如,Liang[17]认为,在SVI中,车辆的驾驶安全受到它们所配备的传感器和计算单元设备的限制,仍然存在许多难以处理的长尾效应。通过模拟VIC的主要路边设备RSU在三种情况下的影响:转弯、事故后和紧急车辆情况,Golestan等人[18]发现,VIC大大增加了自主驾驶的安全性和稳定性。
Ni等人[19]提出了一个基于VIC携带的V2X和5G等车联网无线通信技术的车联网环境下的多车合作操作系统,认为采用新形式的ICV将有助于提高交通效率,节约资源,减少污染,降低事故率。
另一组研究人员对VIC网络的安全性和稳定性提出了质疑,Gerla等人[20]声称,如果在云端传感过程中发生恶意攻击,ICV很可能会禁用转向或制动系统,由于缺乏备份控制,这种攻击在自动驾驶的情况下可能是致命的。根据Guerrero-Ibanez等人[21],车辆云的性能可能会受到车辆移动的影响,这可能会削弱车辆作为云服务器的能力并导致交通拥堵[22]。
然而,这些讨论仅仅集中在技术问题上,忽视了跨境合作创新行为对ICV路径优化影响的差异性。
现有关于跨界协同创新问题的研究大多采用演化对策模型和系统动力学模型,可以描述系统主体决策的各种状态和状态变化的动态过程,并通过参数调整来考察模型仿真过程。Xu 等人[23]在研究上下游政府与航运企业合作治理内河航运污染时,运用进化对策论和系统动力学模型描述了三方合作策略选择的动态演化过程。Fan等人[24]构建了一个进化对策模型,研究地方政府与污染企业在环境治理中的合作互动的进化路径和关键影响因素。
然而,进化对策和系统动力学模型很少被应用于ICV领域,因为变量的多重性增加了模型的复杂性。从影响变量的角度看,内部驱动因素和外部生态建设因素是ICV产业协同创新的影响因素。鼓励跨境协同创新的主要外部生态建设成分是政策环境支持和金融环境支持[25],而内部驱动力包括产学研关系的强度和创新投资[26]。
总之,现有的关于SVI和VIC下ICV跨境合作创新的研究为本研究提供了一些背景,但也存在一定的局限性。首先,虽然学术界已经彻底研究了ICV跨境协同创新的宏观驱动机制,但他们并没有阐明企业间协同创新行为的微观驱动渠道。
其次,文献中对ICV的最优路径选择进行了研究,但很少有研究从跨境协同创新的角度考虑最优路径。第三,现有的关于ICV行业协同创新的研究大多是从静态角度进行的,很少考虑到ICV行业协同创新过程的动态演变,以及对影响协同创新战略选择的因素的定量分析。
因此,本研究构建了一个以传统汽车企业和技术平台提供商为主体的ICV跨行业协同创新的进化对策模型;考虑到在SVI和VIC两种技术路径下的游戏主体行为的动态演变过程,建立了一个系统动力学模型;并分析了关键变量对跨行业合作创新的影响。该研究为ICV产业的协同创新和运行机制提供了参考,为产业成长和产业化的相关科学政策制定提供了理论基础。
III.建议的模型和方法
在这种模式下,车联网跨界协同创新的参与者有两方,即传统汽车企业和技术平台提供商。当汽车企业和技术平台供应商在ICV研发和创新服务方面进行合作时,他们会提高ICV创新研发在两种技术路径上的总水平,从而产生巨大的经济和社会效益。
A. 假设
假设1:合作或不合作是汽车企业和技术平台供应商的选择。假设汽车企业合作的概率为x(0≤x≤1 ),不合作的概率为1-x;技术平台提供者合作的概率为y(0≤y≤1),不合作的概率为1-y。
假设2:如果汽车企业和技术平台供应商都选择不合作,在独立决策的情况下,他们的收入保持不变;换句话说,汽车企业的利润水平为π1,技术平台供应商的利润水平为π2。
假设3:如果双方都选择合作,合作创新将比单独发明更有利。分担研发成本和风险,以及增加预测的回报,是合作创新的两个优势。假设汽车企业和技术平台提供商的收入增加分别为 γi 和 ϕi (i= 1, 2), 汽车企业向技术平台提供商支付的合作成本为T 。汽车企业如果选择VIC,必须为网络连接支付额外费用。此外,在合作进行SVI或VIC研发时,双方都必须承担技术投入的费用是Ci(i = S , V)。因为SVI系统需要昂贵的传感器和计算平台,所以CS>CV。α 为成本分摊系数(0 < α < 1),即技术平台提供者的投入成本为 αCi 汽车企业的投入成本为(1 − α)Ci, 满足 γiπ1 −(1 − α) Ci − T −fe > 0,ϕiπ2−αCi + T > 0; 即双方合作后的利润大于合作前的利润。
假设4: 如果一方在合作期间违约,违约方将负责违约成本P以补偿合作方的损失。
假设5:如果传统汽车企业和技术平台提供者在协同创新过程中因知识溢价而产生的价值为Vi(i=1,2),由对策对方的主体获得;同时,双方企业在合作创新过程中交换或共享一些核心技术,对方有可能模仿或复制重要的技术成果,这种风险将限制合作创新的可能性。
假设两家公司的技术储备都是βi(i = 1, 2),它们的技术共享程度是μi(i = 1, 2),它们的协同创新风险系数是χi(i = 1, 2)。
B. 模型
1) SVI情景下的进化对策模型
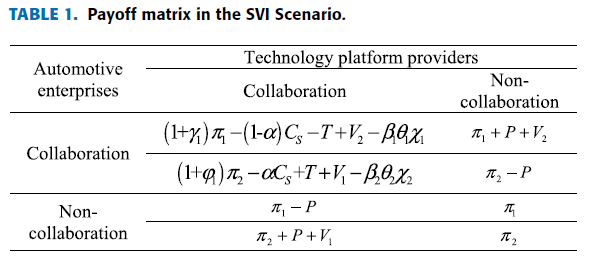
在SVI情景下,汽车企业和技术平台供应商之间的对策回报矩阵可以通过结合前面的假设来建立,如表1所示。
汽车企业选择的合作战略的预期回报被标记为U11。

汽车企业选择的非合作战略的预期回报被标记为U12。

汽车企业战略的平均回报率被标记为U1。

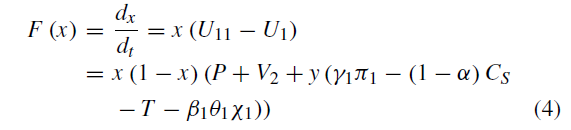
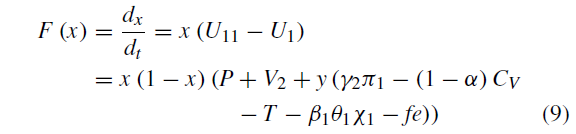
根据马尔萨斯方程,汽车企业的复制动态方程相应为:
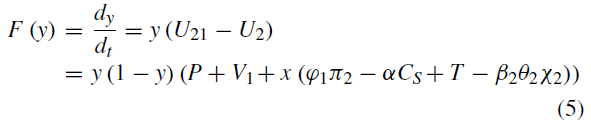
同样,对于技术平台供应商来说,复制的动态方程如下:
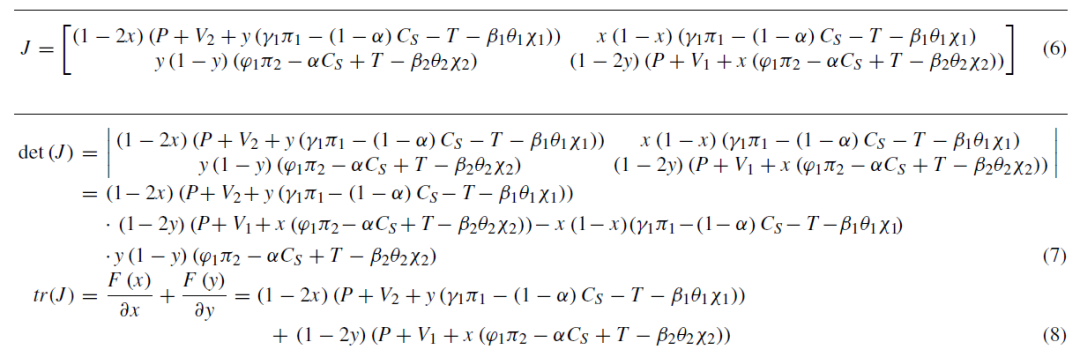
根据弗里德曼的观点,微分方程系统的演化稳定性策略可以通过雅可比矩阵的局部稳定性分析来确定,雅可比矩阵可以通过上述复制的动态方程(6)来计算,如下页底部所示。
雅可比矩阵的行列式det(J)和迹线tr(J)是用上述公式(7)和(8)计算的,如下页底部所示。
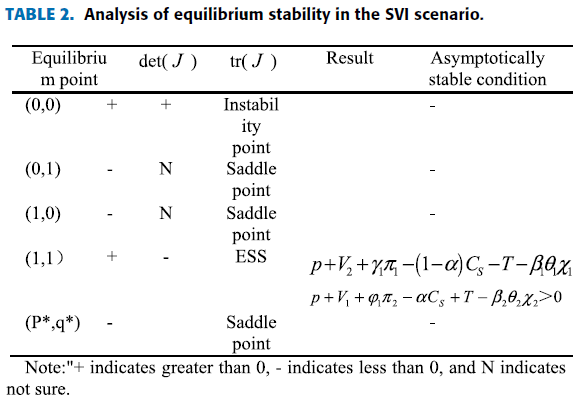
所有平衡点的渐进稳定条件和稳定性都显示在表2中。
由表2可知,该系统有4个进化均衡,唯一的进化稳定策略为(1,1),对应进化稳定策略组合(协作,协作),说明最终的平衡状态为(协作,协作)。这与目前的情况是一致的:当汽车企业和技术平台供应商同时加入到SVI的研发合作中时,双方的收益都是最大的,而且双方都选择合作作为最佳的稳定战略组合。
2) VIC情景下的进化对策模型
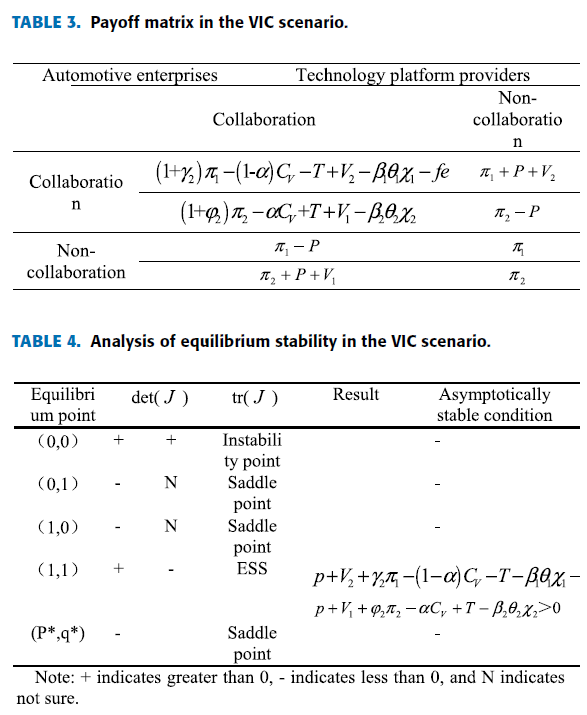
结合上述假设,可以构建VIC场景下汽车企业与技术平台提供商之间的对策收益矩阵,如表3所示。
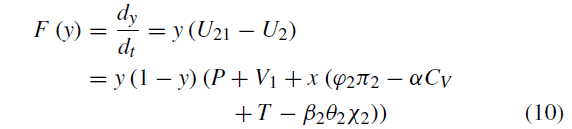
同样,汽车企业和技术平台提供商的复制动力学方程如下:
根据Friedman的理论,微分方程系统的演化稳定策略可以通过Jacobi矩阵的局部稳定性分析来确定;雅可比矩阵可由上述复制的动力学方程(11)计算,如下一页底部所示。
同样,各平衡点的渐近稳定条件和稳定性如表4所示。
由表2和表4可知,VIC系统的演化稳定策略与SVI系统相同;
均为(1,1),对应演化稳定策略组合(协作,协作),说明技术路线对双方最终的策略选择影响不大。
IV.模拟与讨论
演化对策模型是对过程和均衡结果的解释性阐述,但无法捕捉汽车企业和技术平台提供商决策的演化路径。本研究利用基于进化对策分析的系统动力学仿真软件Vensim PLE,对汽车企业与技术平台提供商实现转型协作的对策行为进行建模和模拟,模拟双方决策调整的动态过程,深入探讨模型结构和主体行为变化。
A. 进化对策的SD模型
1) SD模型的因果循环图
汽车智能网联化改造赋能的协同行为体系是由汽车企业和技术平台商双方的合作意愿、研发投入、可获得的收益等要素构成的。如图2所示,SD模型的因果循环图是通过研究这些要素之间的相互关系得出的,其关键的因果反馈循环如下:
1. 汽车企业的合作投资→汽车企业的资金压力→汽车企业的合作意愿。
2. ICV改造绩效→汽车企业的可用收入→汽车企业的合作意愿。
3. 技术平台商的合作投入→汽车企业的资金压力→汽车企业的合作意愿。
4. 技术平台商的合作投资→技术平台商的资金压力→技术平台商的合作意愿。
5.ICV转型的表现→技术平台供应商的可用收入→技术平台供应商的合作意愿。
6. 汽车企业的合作投资→技术平台商的资金压力→技术平台商的合作意愿。
2) SD模型的系统流程图
汽车企业和技术平台供应商之间的合作决策的系统流程图模型可以利用上述因果关系模型及其反馈回路分析,通过整合系统中的每个变量来建立,如图3所示。
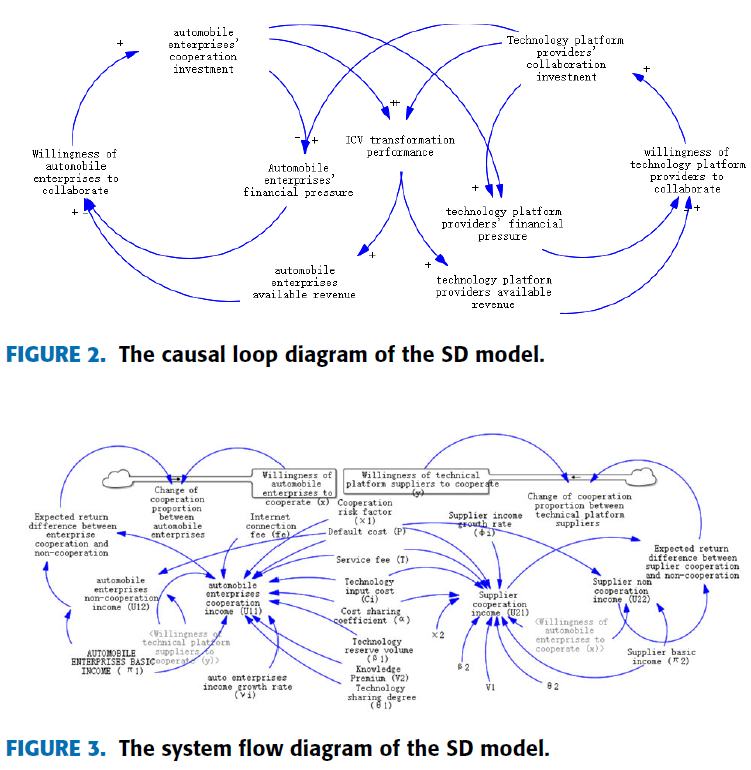
x和y是水平变量,分别表示汽车企业以及技术平台提供商选择合作的比例。汽车企业和技术平台商选择合作的比例变化量,分别表示两种股票的变化率,作为比率变量。其余的是辅助变量。根据进化游戏的结果,可以清楚地看到各因素之间的关系。
B. 数值分析和讨论
极狐汽车与百度合作打造的阿波罗之月,于2021年6月作为百度阿波罗第五代L4级ICV公开亮相,支持VIC,而价格仅为SVI智能汽车的一小部分,约48万元[27],据此CS=200,CV=50。根据官方数据,由吉利和百度以两家企业55%和45%的股份成立的Pixel-J汽车公司,计划的成本分摊系数α=0.5。因为VIC能够将部分车方成本转嫁给路方,所以利润率高于现实。因此 γ1=0.2, γ2=0.4, ϕ1=0.6, ϕ2=0.7。根据陈和张[28], P ∈ [15, 35] and β1=0.3, β2=0.7, θ1= 0.65, θ2=0.65, χ 1=0.5, χ2=0.3, V1=30, V1=20。

将对策系统对汽车企业和技术平台提供商的初始策略选择概率设置为0.5。通过修改参数值,分析了SVI和VIC对协同创新演化结果的影响,以及成本分担系数、默认成本、网络连接费和协同创新风险对演化路径的影响。
1) SVI与VIC下的进化结果
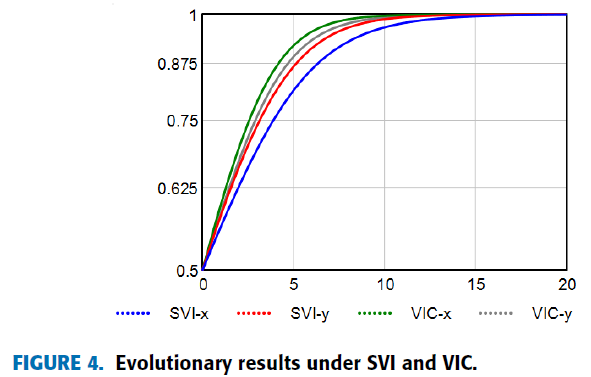
图4为ICV跨界协同创新对策系统仿真后的演化结果。无论在哪种状态下,合作都是汽车企业和技术平台提供商的最终稳定平衡策略,在VIC状态下,系统达到稳定状态的速度会加快。
VIC所依赖的路端建设可以 加强人-车-路的耦合,使系统可控、可测,减少随机性,同时使ICV研发更有意义,也意味着优化外部环境可以引导汽车企业和技术平台商更倾向于协同创新策略。
有趣的是,本文的创新发现,汽车企业在VIC场景下率先达到稳定状态,尽管他们必须支付高额的网络连接费。在SVI的情况下,技术平台供应商是第一个达到稳定状态的。这相当于智能手机的演变,ICVs从SVI到VIC的进展。随着道路基础设施的快速升级和用户规模的逐步积累,ICV终端和载体将变得越来越重要,从而使ICV的渗透率大大增加。汽车企业作为推广ICV的主体,将成为主要受益者,增加合作创新的意愿。
2) 费用分担系数对演化结果的影响
假设技术平台提供者的成本分担系数为0.1、0.5和0.7,ICV行业跨境协同创新体系的演化结果如图5所示。
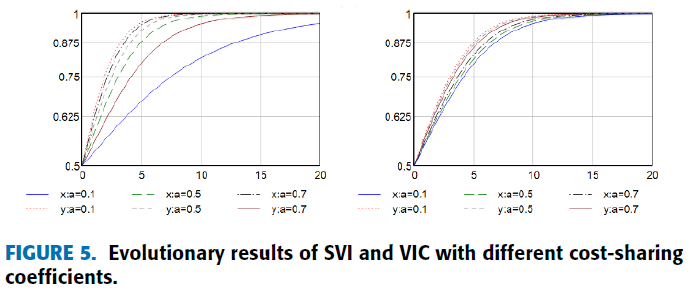
通过调整技术平台商的成本分担系数,本文进一步发现,当汽车企业的成本分担比例相对较高时,尽管承担的成本较高,但从自身发展的长远角度出发,倾向于与技术平台商合作,即使此时双方的稳定速度较慢。当技术平台供应商的成本分担率相对较高时,如果他们无法将自己的技术转化为产品并推向市场,就会遭受巨大损失。因此,他们倾向于与汽车企业合作进行协同创新,双方的稳定速度在此时加快。由于SVI州的研发费用大大高于VIC州,这种现象更加明显。政府可以对开发ICV的汽车企业和技术平台商给予研发补贴,创造一个健康的外部创新生态系统,鼓励双方合作,提高协同创新的实施效率。
3) 违约成本对演化结果的影响
如果其中一个合作者违约,默认成本被设定为15、25和35,模拟产生ICVs的跨境合作创新系统的演变,如图6所示。违约金可以迫使双方按照既定协议完成协同创新的职责,违约金无论大小,都可以鼓励双方在协同创新的方向上前进。随着默认成本的上升,系统倾向于以更快的速度达到稳定状态,这表明默认成本越大,对合作创新战略选择的约束就越强。此外,在相同的默认成本下,SVI情景下演变成合作局面的概率低于VIC情景下,这表明VIC环境可以成功地促进双方的合作。
4) 网络连接费对演化结果的影响
就VIC而言,融合型ICV必须利用5G技术与 "人、车、路、云 "的实时信息交互,实现多重协同感知,因此,汽车企业必须支付15、25、35的网络连接费,分别对应低、中、高三个资费等级。
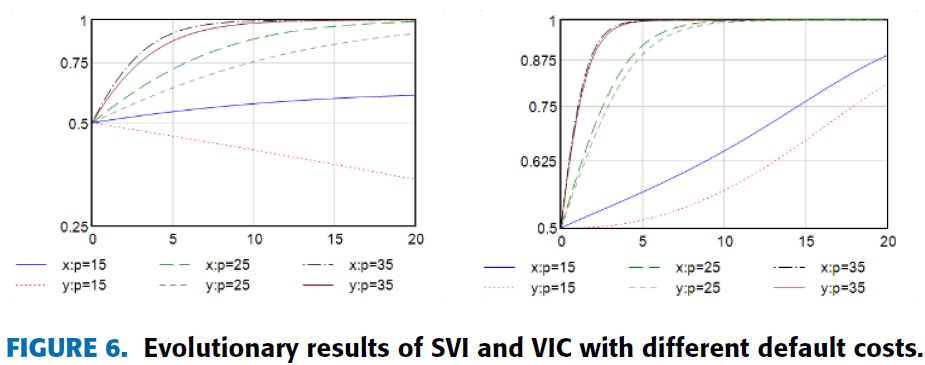
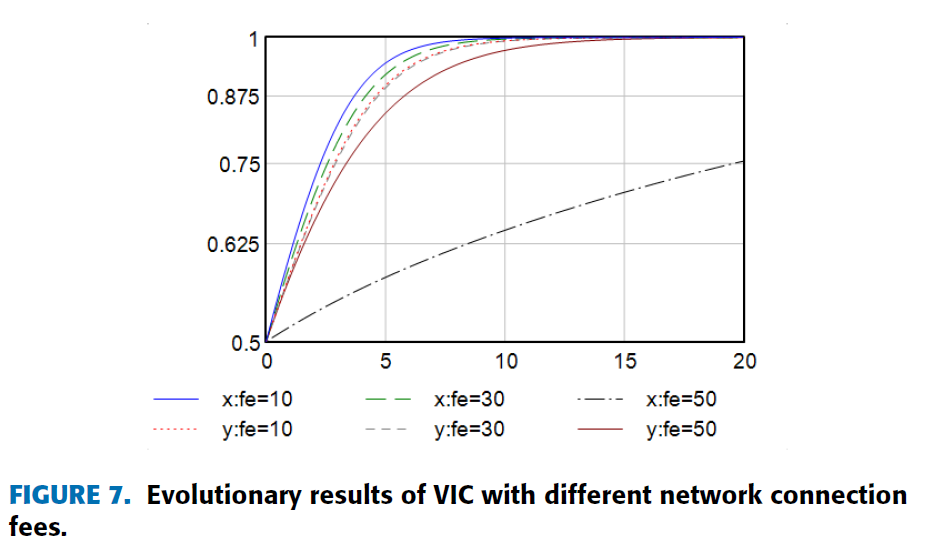
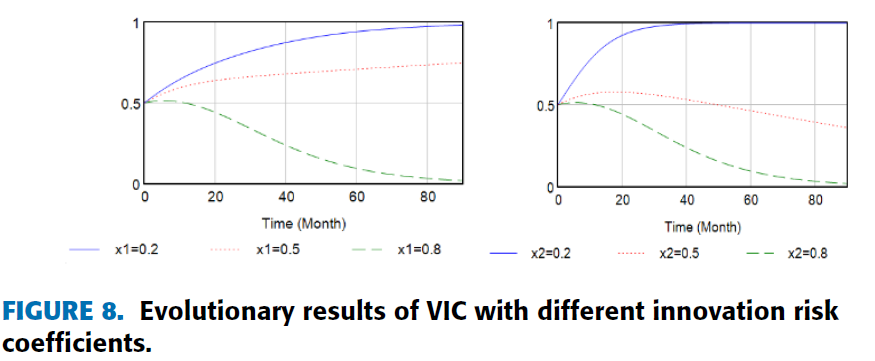
图7描述了模拟后的跨境协同创新系统的演变结果。在这个模型中,低度和中度的网络连接费对进化策略的影响不大,尤其是对技术平台供应商而言;当网络连接费在10到30之间时,系统的进化路径实际上是重叠的。当网络连接费大幅增长时(fe=50),汽车企业的合作意愿急剧下降,技术平台供应商向稳定状态收敛的速度也急剧下降。
5) 协同创新风险系数对演化结果的影响
图8描述了SVI情景下协同创新风险系数对汽车企业和技术平台提供商战略选择的影响,其他参数保持不变。由图可知,当协同创新风险系数χi在0.5 ~ 0.8之间时,汽车企业的合作意愿向非合作意愿转变;当协同创新风险系数χi在0.2 ~ 0.5之间时,技术平台提供商的合作意愿向非合作意愿转变。
协同创新风险系数越低,双方的协同创新发展得越快。作为汽车行业的新生力量,技术平台商更关注未知风险因素对企业的负面影响,在协同创新前对潜在的风险因素进行预测和评估,避免协同失败带来的损失。
V.结论和政策建议
我们的研究提出了一个进化对策模型,以重新思考传统汽车企业和技术平台提供商之间的合作动态,以推动ICV行业的跨境协同创新。与以往大多数关于ICV跨界协同创新的研究不同[13],SVI和VIC作为ICV产业的两种不同技术路径,本研究构建了SVI和VIC演化对策模型,分别探讨微观的动态演化过程。
此外,我们利用系统动力学理论分析了一些重要变量对跨境协同创新的影响。一个成功的模型应该重现目标系统的基本特征,同时也能发现早期研究中没有记录的新模式[26]。我们的工作不仅显示了与现有文献一致的结论,如来自进化对策的均衡,而且还抓住了最优技术路径选择对ICV跨境协同创新的影响。还进行了基于理论分析的数值模拟,并分析了影响进化路径的因素。
A. 结论
(1) 在复杂演化对策的背景下,汽车企业与技术平台提供商无论选择SVI还是VIC技术路径,最终的稳定均衡策略都是协作。因此,合作是一种基于双方资源和能力互补的选择。
(2) 与SVI技术路径相比,VIC可以使ICV跨境协同创新系统以更快的速度发展到协作状态。SVI场景下,系统达到协作状态的时间为20,VIC场景下,系统达到协作状态的时间为15。
(3) 默认成本和输入成本对系统达到协作状态的速度的影响是显著的。当默认成本为35时,VIC系统达到合作状态的时间为8,而当技术平台供应商的成本分担系数为0.7时,VIC系统达到合作状态的时间为14。这一结果表明,有效的惩罚机制迫使双方进行创新合作,从而保证了双方合作创新战略的稳定性。合理的成本分配机制可以保证双方都获得满意的收益,实现协同创新的双赢局面。
B. 政策建议
《智能汽车发展与创新战略》提出,到2025年,实现具备自主驾驶条件的智能汽车达到规模化生产,并构建跨界融合的智能汽车产业生态体系。根据这一发展目标,结合其他ICV产业政策,我们分别从政策面和供给面提出以下具体ICV发展建议。其中,政策面从政府的政策制定开始,所以被概括为顶层设计;由于本文关注的是ICV跨界协同创新,所以供给面被概括为技术创新。
在中国政府的顶层设计方面,应加强政策支持,整合 "政、产、学、研 "的多种资源。《智能网联汽车技术路线图2.0》提出在2025年实现汽车与信息通信产业的协同发展,形成新的产业生态圈,并不断完善政策和监管体系。具体而言,面对ICV创新的重大需求,政府应鼓励和引导汽车企业与互联网、软件、硬件等技术平台提供商合作。从而创造一个跨境协同创新的生态系统,有利于加速ICV产业的发展,实现 "曲线超车"。
此外,制定合理的补贴和惩罚措施是促进ICV跨境合作创新的关键点。Yang的研究结果表明,补贴和惩罚机制是提升ICV跨界协同创新的主动性和兴奋度的重要驱动因素[7]。一方面,政府可以通过增加对智能互联技术的补贴来降低企业技术转换的高成本,达到鼓励企业转换的目的。另一方面,作为利益分配机制的保障,政府应逐步建立完善的信息公开和监督制度。
在技术创新方面,应加强环境支持,加快道路末端基础设施建设。根据现有政策,将国际中心作为创建智能汽车和智能交通的杠杆中心点,可以鼓励跨行业的研发合作,减少交通拥堵。根据维克技术路径,应加快改善基础设施,包括路边传感设备、5G通信网络和大数据云控制平台,同时建立完整的icv基础生态系统,使“智能汽车”可以在“智能道路”上行驶。
C. 本研究的局限性
本研究为未来汽车工业跨界协同创新研究提供了理论基础。然而,也有一些限制。例如,目前仅收集了部分来自中国的真实数据进行模拟分析。未来的研究可以从其他国家收集更广泛和详细的数据,以得出更系统的发现。此外,车联网跨界协同创新的主题仅仅是传统汽车企业和类似互联网企业的技术平台提供商。未来的研究可以集中在各种主题上,例如政府、行业、学术界和研究部门的整合,进行协同ICV研发。
参考文献:
[1] IHS Markit. The Future of Vehicle Service—A Study of the Market’s Future Trendsin China. Accessed: Nov. 13, 2020. [Online]. Available: https://ihsmarkit.com/Info/chi/future-of-connected-car-in-china.html
[2]R. Zhang, W. Zhong, N. Wang, R. Sheng, Y. Wang, and Y. Zhou, ‘‘The innovation effect of intelligent connected vehicle policies in China,’’IEEE Access, vol. 10, pp. 24738–24748, 2022, doi:
10.1109/ACCESS.2022.3155167.
[3]Z. Liu, H. Song, H. Hao, and F. Zhao,‘‘Innovation and development strate- gies of China’s new-generation smart vehicles based on 4S integration,’’ Strategic StudyChin. Acad. Eng., vol. 23, pp. 153– 162, Mar. 2021, doi:
10.15302/J-SSCAE-2021.03.019.
[4] S. Zheng, S. Wu, and J. Guo,‘‘The research on the evolution of autonomous vehicle’s technological trajectory: An integrated framework based on communityrecognition and main path analysis,’’Sci. Res. Manage., vol. 43, pp. 126– 136, Feb. 2022, doi: 10.19571/j.cnki.1000- 2995.2022.02.015.
[5]Y. Wang, G. Lu, and H. Yu,‘‘Traffic engineering considering cooperative vehicle infrastructure system,’’Strategic StudyChin. Acad. Eng., vol. 20, pp. 106– 110, Feb. 2018, doi: 10.15302/J-SSCAE-2018.02.016.
[6]D. Shin,‘‘The actualization of meta affordances: Conceptualizing affordance actualization in the metaverse games,’’Comput. Hum.Behav., vol. 133, Aug. 2022, Art. no. 107292, doi: 10.1016/j.chb.2022.107292.
[7]D. G. Yang, K. Jiang, D. Zhao, C. Yu, Z. Cao, S. Xie, Z. Xiao, X. Jiao, S. Wang, and K. Zhang,‘‘Intelligent and connected vehicles: Current status and future perspectives,’’Sci. China-Technol.Sci., vol. 61, no. 10, pp. 1446– 1471, Oct. 2018, doi: 10.1007/s11431-017-9338-1.
[8]L. Zhao, Z. Bi, A. Hawbani, K. Yu, Y. Zhang, and M. Guizani, ‘‘ELITE: An intelligent digital twin-based hierarchical routing scheme for softwarized vehicular networks,’’IEEE Trans.Mobile Comput., early access, May 31, 2022, doi: 10.1109/TMC.2022.3179254.
[9] S. Liu, J. Yu, X. Deng, and S. Wan,‘‘FedCPF: An efficient-communication federated learning approach for vehicular edge computing in 6G com- munication networks,’’IEEE Trans.Intell. Transp. Syst., vol. 23, no. 2, pp. 1616– 1629, Feb. 2022, doi: 10.1109/TITS.2021.3099368.
[10] M. A. Naeem, X. Jia, M. A. Saleem, W. Akbar, A. Hussain, S. Nazir, and K. M. Ahmad,‘‘Vehicle to everything (V2X) communication protocol by using vehicularAD-HOC network,’’inProc. 17th Int. Comput. Conf. WaveletAct. Media Technol. Inf. Process. (ICCWAMTIP), Chengdu, China, Dec. 2020, pp. 384–388, doi:10.1109/ICCWAMTIP51612.2020.9317386.
[11] C. Chen, C. Wang, B. Liu, C. He, L. Cong, and S. Wan,‘‘Edge intelligence empoweredvehicle detection and image segmentation for autonomousvehicles,’’IEEE Trans. Intell. Transp.Syst., early access, Jan. 5, 2023, doi:
10.1109/TITS.2022.3232153.
[12] C. Feng,‘‘The development dilemma and coping strategy of China’s intelligent network automobile industry,’’Contemp. Econ. Manage., vol. 40, pp. 64–70, May 2018, doi: 10.13253/j.cnki.ddjjgl.2018.05.008.
[13] F. Zhao, K. Xu, and Z. Liu,‘‘Research on upgrading of the automotive industrytowards the intelligent-connected automotive industry from the perspective of value chains,’’Sci., Technol. PolicyProgram, vol. 33, pp. 56–61, Jun. 2016, doi: 10.6049/kjjbydc.2016020334.
[14] K. Li, Y. Dai, S. Li, and M. Bian,‘‘State-of-the-art and technical trends of intelligent and connected vehicles,’’J. Automot.Saf. Energy, vol. 8, no. 1, pp. 1– 14, 2017, doi: 10.3969/j.issn.1674-957X.2021.09.085.
[15] Y. Wu, H. Guo, C. Chakraborty, M. Khosravi, S. Berretti, and S. Wan, ‘‘Edge computing driven low-light image dynamic enhancement for object detection,’’IEEE Trans. Netw. Sci.Eng., early access, Feb. 14, 2022, doi:
10.1109/TNSE.2022.3151502.
[16] Y. Ge, X. Liu, L. Tang, and D. M. West,‘‘Smart transportation in Chinaandthe United States,’’Center for Technol. Innov., Brookings Inst., Washington, DC, USA, Tech. Rep., Dec. 2017.
[17] X. Liang,‘‘Vehicle-road collaboration: The plan on upgrading the intelligent transportation,’’Frontiers, vol. 4, pp. 56–65, Apr. 2021, doi:
10.16619/j.cnki.rmltxsqy.2021.04.007.
[18] K. Golestan, R. Soua, F. Karray, and M. S. Kamel,‘‘Situation aware- ness within the context of connected cars: A comprehensive review and recent trends,’’Inf. Fusion, vol. 29, pp. 68–83, May 2016, doi:
10.1016/j.inffus.2015.08.001.
[19] J. Ni, J. Han, and F. Dong,‘‘Multivehicle cooperative lane change control strategy for intelligent connected vehicle,’’J. Adv.Transp., vol. 2020, pp. 1– 10, Feb. 2020, doi: 10.1155/2020/8672928.
[20] M. Gerla, E.-K. Lee, G. Pau, and U. Lee,‘‘Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds,’’inProc. IEEE World Forum Internet Things (WF-IoT), Seoul, South Korea,Mar. 2014, pp. 241–246, doi: 10.1109/WF-IoT.2014.6803166.
[21] L. Zhao, C. Wang, K. Zhao, D. Tarchi, S. Wan, and N. Kumar, ‘‘INTERLINK: A digital twin-assisted storage strategy for satellite- terrestrial networks,’’IEEE Trans.Aerosp. Electron. Syst., vol. 58, no. 5, pp. 3746–3759, Oct. 2022, doi: 10.1109/TAES.2022.3169130.
[22] J. A. Guerrero-Ibanez, S. Zeadally, and J. Contreras-Castillo,‘‘Inte- grationchallenges of intelligent transportation systems with connected vehicle, cloud computing, and Internet of Things technologies,’’IEEE Wireless Commun., vol. 22, no. 6, pp. 122– 128, Dec. 2015, doi:
10.1109/MWC.2015.7368833.
[23] L. Xu, Z. Di, and J. Chen,‘‘Evolutionary game of inland shipping pollution control under government co-supervision,’’Mar. Pollut.Bull., vol. 171, Oct. 2021, Art. no. 112730, doi: 10.1016/j.marpolbul.2021.112730.
[24] W. Fan, S. Wang, X. Gu, Z. Zhou, Y. Zhao, and W. Huo,‘‘Evolutionary game analysis on industrial pollution control of local government in China,’’J. Environ.Manage., vol. 298, Nov. 2021, Art. no. 113499, doi:
10.1016/j.jenvman.2021.113499.
[25] S. Yin, N. Zhang, K. Ullah, and S. Gao,‘‘Enhancing digital innovation for the sustainable transformation of manufacturing industry: A Pressure-State-Response system framework to perceptions of digital green innova- tion and its performance for green and intelligent manufacturing,’’Systems, vol. 10, no. 3, p. 72, May 2022, doi: 10.3390/systems10030072.
[26] Y. Liu, R. Xi, and F. Zhou,‘‘Research on the optimization path oftechnology innovation of the ICV industry-empirical analysis based on DEMATEL and system dynamics model,’’Soft Sci., vol. 35, no. 9,pp. 37–46, Jun. 2021, 10.13956/j.ss.1001-8409.2021.09.06.
[27] ITHome. L4 AutonomousDriving is Supported at a Cost of480,000 Yuan, and the Robotaxi Model Developed Jointly by BAIC Blue Valleyand Baidu is Now Officially Mass-Produced. Accessed: Dec. 14, 2021. [Online]. Available: https://www.ithome.com/0/592/286.html
[28] Z. Chen and J. Zhang,‘‘Evolutionary game analysis of government participation in reverse supply chain cooperation,’’Statist. Decis., vol. 37, no. 18, pp. 180– 184, Aug. 2021, doi: 10.13546/j.cnki.tjyjc.2021.18.041.
分享不易,恳请点个【👍】和【在看】
