--关注、星标、回复“SOA”--





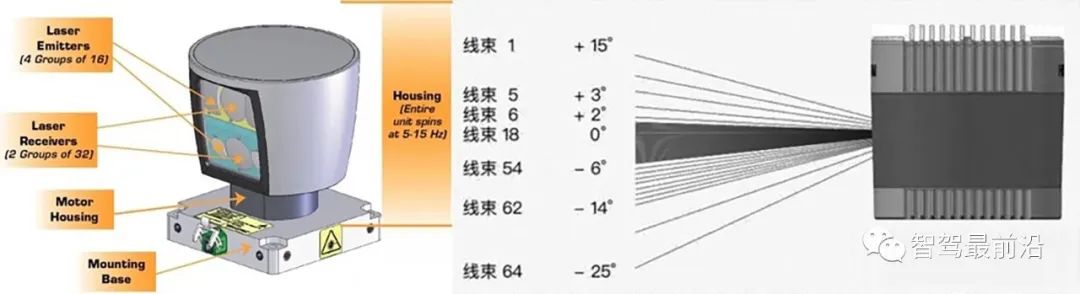
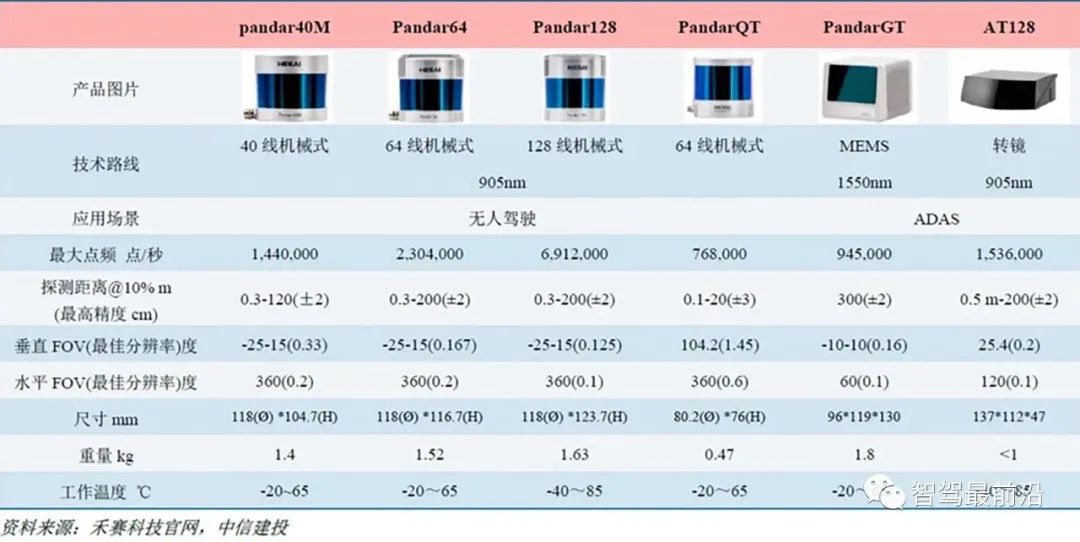
2. 当前所有Lidar中,精度最高、点云最稠密(128线,双回波可达691万点/秒); | |
机械转台需要满足:较小的重量、体积、极高的角精度、可承受20Hz的高速旋转。这对于机械设计和加工、伺服电机的运动控制都有着极大的挑战。这导致了: 2. 体积大,重量大,可靠性差,平均失效时间只有1000-3000小时,需要频繁的维护保养,难以达到车规级最低13000小时的要求。 3. 内含较多可动部件,在行车环境下磨损严重、需要大量人工组装调教,规模化量产困难 |


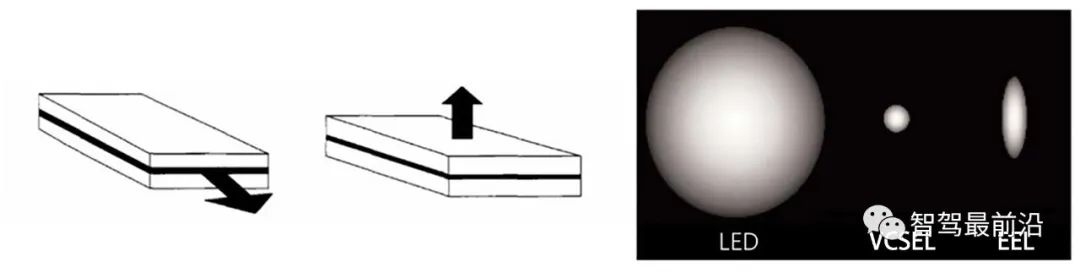
2. 受限于功率,VCSEL探测距离相对受限; |
2. 控制灵活,可以对ROI进行增稠扫描; 3. 单激光头可以用光纤激光器,比VSCEL功率大,可探测距离远; | |
2. 出点数量极限比较低; |
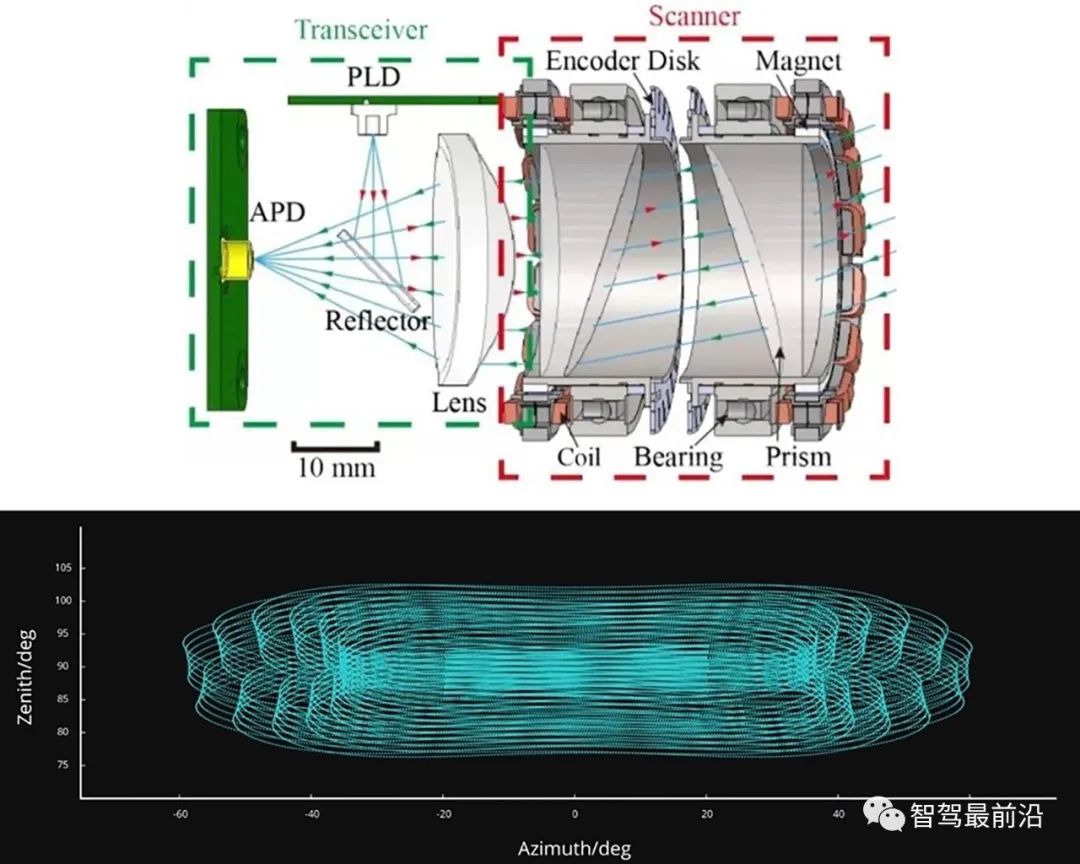
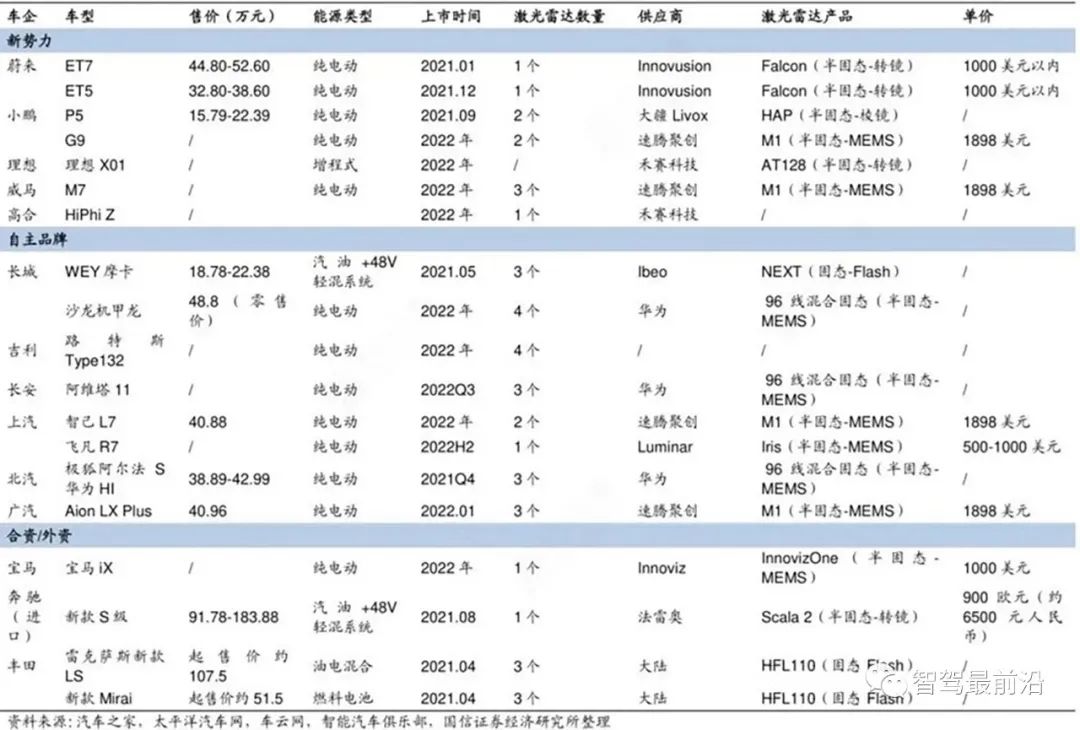
2. 每次扫描成像的范围不一样,车辆高速移动中成像不连续; 3. 原理导致电机转速过高,6000rpm,影响寿命。 也因此,此款Lidar市场化情况不理想,只有小鹏P5安装了一些,Livox应该也在开发新的方案 |
市场反馈不好 | 2022最强转镜雷达 | ||||
2. 减小了硬件体积; | |
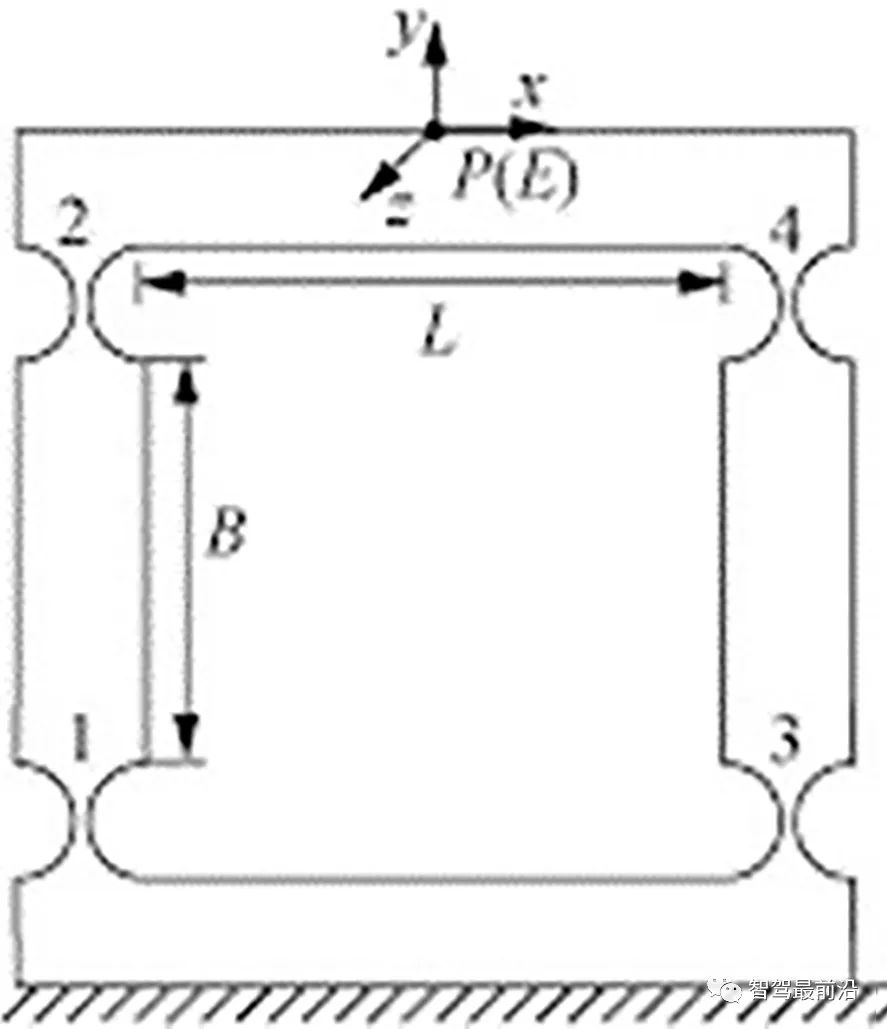
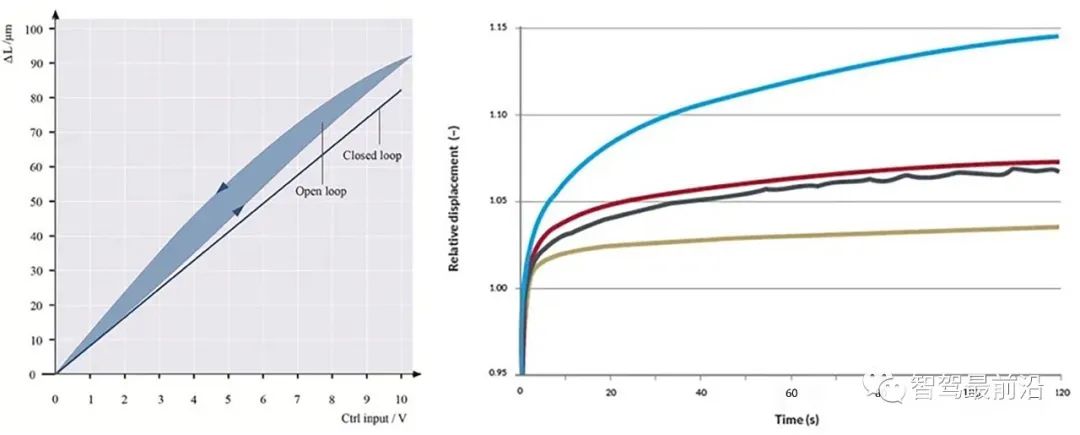
2. 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 3. 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 4. MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,总体鲁棒性不如转镜方案(2022Q2结论)。 |
北汽、威马、Lutos | 元戎robotaxi | 元戎robotaxi |


-- END --