

上一期文章,分享了英飞凌的参考手册对 MOSFET 并联的设计指导。起主要作用的是 Vgsth 和源极寄生电感。
本期文章,继续分享英飞凌关于 MOSFET 并联的参考手册,介绍在均流发挥重要作用的 MOSFET 参数,并量化了由于不均流而承载更多电流的 MOSFET 中产生的额外功率损耗。
首先建立如下图的半桥仿真模型:
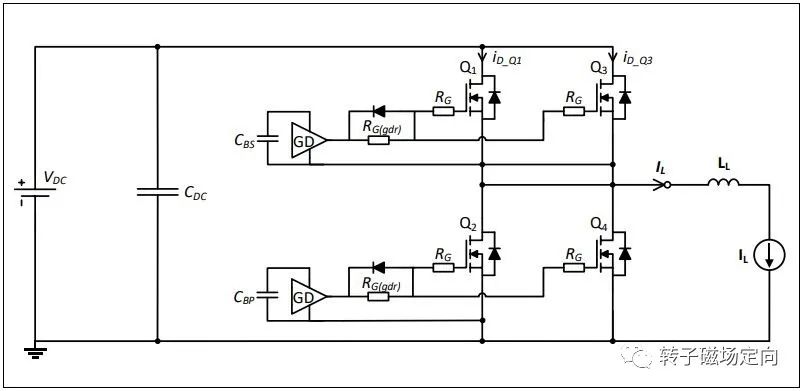
半桥仿真模型的关键参数如下:
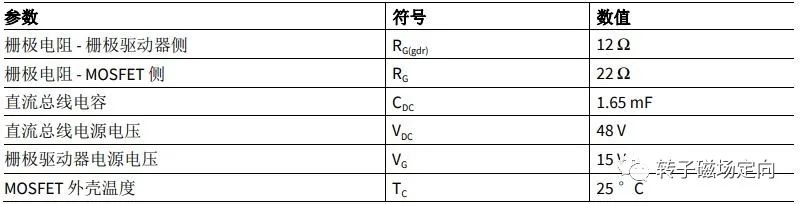
模型的建立,不考虑外部寄生参数,包括门极和源极的寄生电感,主要讨论MOSFET本体的参数。
对 MOS 并联均流影响最大的几个参数如下:

参数的影响是相似的——开关速度更快的 MOSFET 导致其导通时的总体功率耗散增加,而关断时功率耗散降低,因为开通的早,其承担的电流更大。
VGS(th) 参数的主要区别在于提前导通和延迟关断,这会导致该器件在开通和关断时的功率耗散均增加,因为更低的 VGS(th) 会导致提前开通和延迟关断。
而且VGS(th)这个参数是负温度系数,如下图:

VGS(th)越低,并联时承担更大的电流,导致结温上升,进而VGS(th)进一步降低,加剧了并联的不均流。
门极寄生电感,通过实验 LG 可以证明对均流的影响几乎可以忽略,最重要的因素就是 VGS(th)。
以英飞凌某款MOSFET的手册为例,给出了VGS(th)的典型值和范围。

量产器件批次的一致性,体现了 MOSFET 厂家的工艺和设计水平。各个 MOSFET 之间的这种 VGS(th)变化范围(最小到最大)和技术代差,电压等级和厂家水平息息相关。作为 MOSFET 的代表厂商,极低的 VGS(th) 差异使英飞凌 MOSFET 非常适合并联。这已被市场广泛认定为英飞凌 MOSFET 最具备技术壁垒的特点之一。
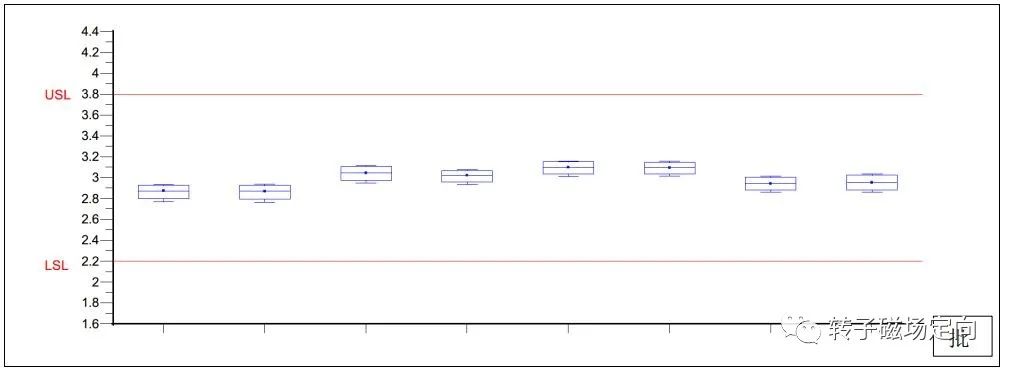
上图是英飞凌参考手册出具的不同批次产品VGS(th)分布图,具体分布在2.75V`3.15V这个0.4V的区间内,直接体现了英飞凌对产品一致性的管控能力。接下来的章节,会量化关键参数的具体影响。
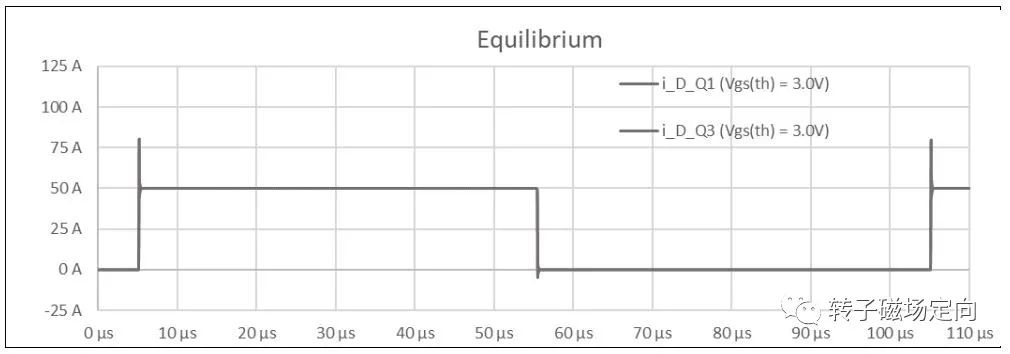
假设半桥电路模型中, Q1 和 Q3 具备完全一致的参数,同时 PCB 寄生参数完全一致,那么 Q1 和 Q3 并联时二者是完全均流的。如下可以看到二者分配的 Id 是完全一致的。
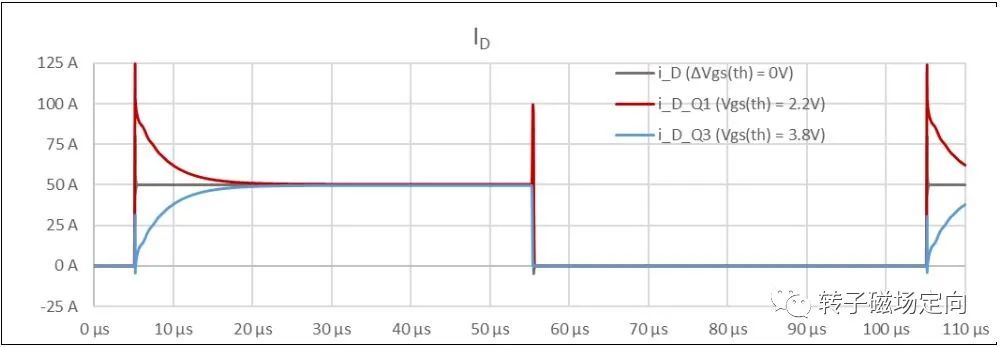
如果Q1_VGS(th)=2.2V, Q3_VGS(th)=3.8V, 那么当并联 MOS 需要开通时,因为 Q1 的门槛电压低,会提前开通,Q3 的门槛电压高,相比 Q1 会延时开通。在这种差异下,二者的开关过程的电流分配如下图:
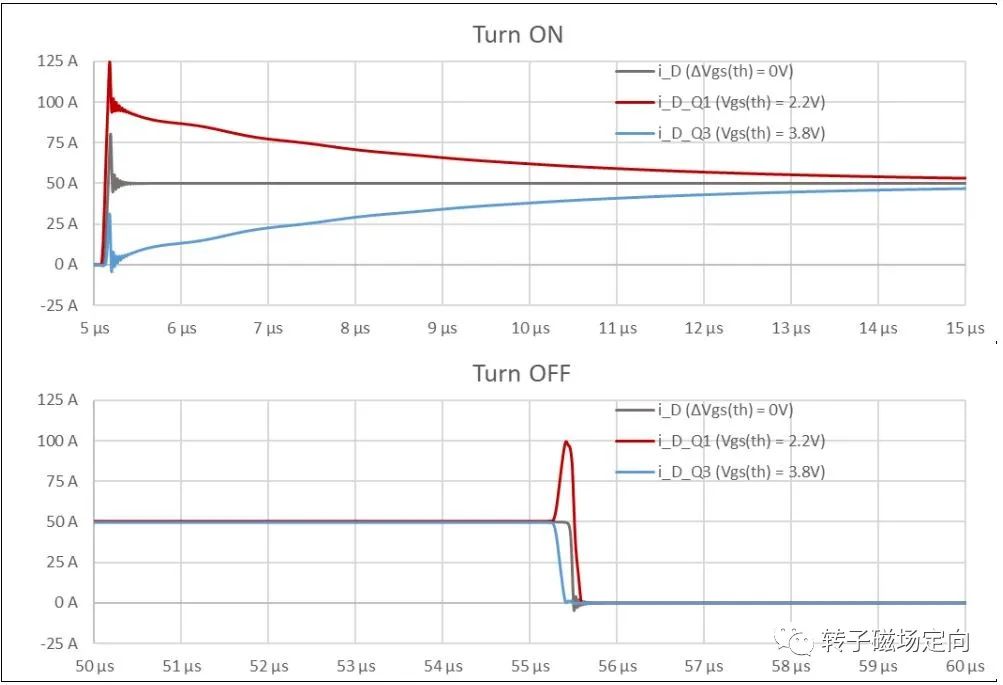
把开通过程和关断过程展开,如下图,VGS(th) 差异最大的情况导致的不均流波形:
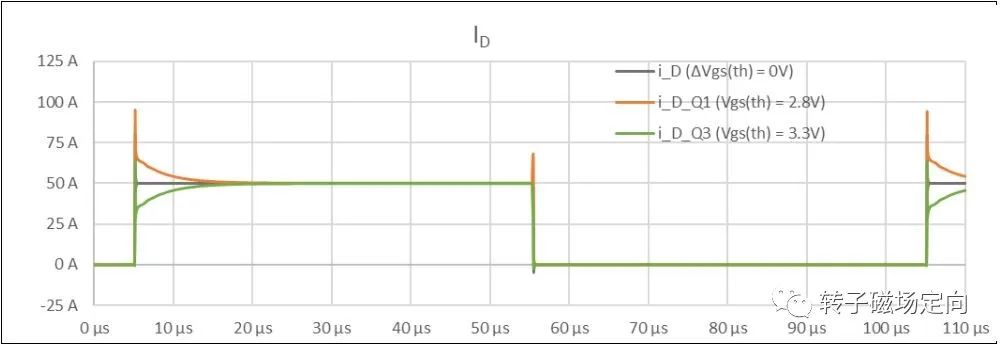
如果如果 Q1_VGS(th)=2.8V, Q3_VGS(th)=3.3V, 那么二者的开关过程的电流分配如下图:
以 100us 作为单次开关周期,不同VGS(th)的差异下,并联 MOS 的损耗数据如下图:

在10k开关频率,50%占空比,不同的VGS(th)的损耗数据如下图:
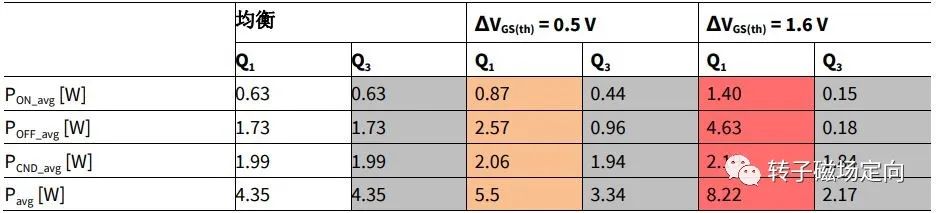
通过上述数据证明,并联 MOS 的 VGS(th) 差异越小,门槛电压越小的 MOS 会承担更大的电流,进而有更大的开关损耗。哪怕导通电阻一致,但是因为寄生电感的影响,MOS开通后,电流的不平衡影响依然会持续10us左右,进而对导通损耗也有微小的影响。
VGS(th) 差异为 0.5 V (± 0.25 V) 时,VGS(th) 较低的 MOSFET 损耗会增加 26%, 如果我 ∆VGS(th) = 1.6 V (± 0.8 V) ,则损耗会增加 88%。那么Q1相比Q3,会工作在更加严苛的状态下,存在更高的失效风险。
依然选择10k开关频率,50%占空比的工况。
在2个 MOSFET 并联的情况下,对比以下 3 种不同的 VGS(th) 差异下的工况:

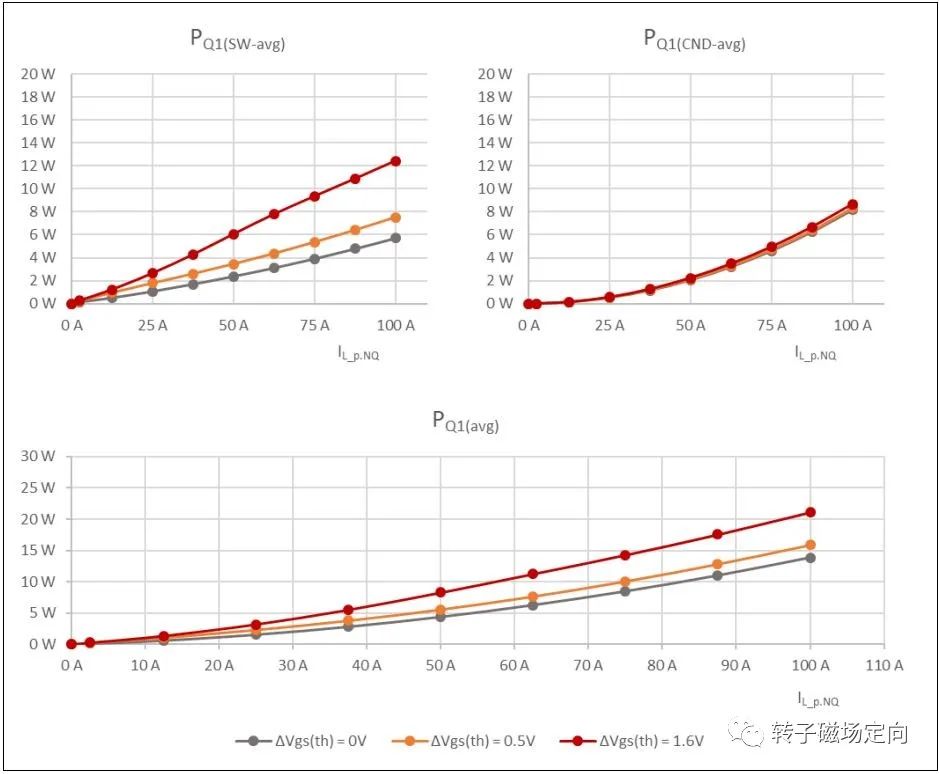
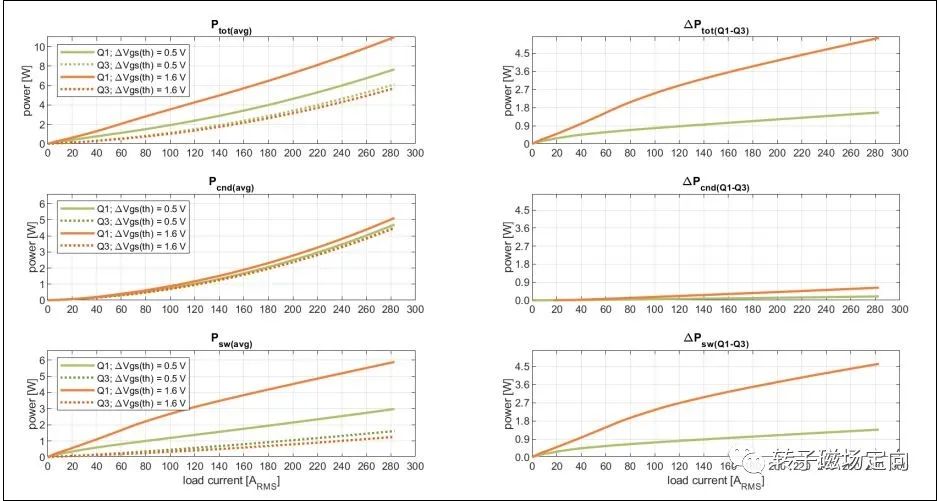
上图是不同门槛电压差异的下损耗具体差异数据,其中
PQ1(SW_avg) – MOSFET Q1 的平均开关损耗
PQ1(CND_avg) – MOSFET Q1 的平均传导损耗
PQ1(avg) – MOSFET Q1 的总体平均损耗(传导和开关损耗之和)
在最大 ∆VGS(th) 的情况下,最热 MOSFET 的总体损耗增加:
• IL_p.NQ = 25 A 时为 104%
• IL_p.NQ = 50 A 时为 88%
• IL_p.NQ = 100 A 时为 52%
当值为 ∆VGS(th) = 0.5 V 时,最热 MOSFET 的损耗增加值显著减小。总体损耗增加:
• IL_p.NQ = 25 A 时为 48%
• IL_p.NQ = 50 A 时为 26%
• IL_p.NQ = 100 A 时为 14%
在4个 MOSFET 并联的情况下,对比以下 3 种不同的 VGS(th) 差异下的工况:

对损耗的导致的差异如下图:
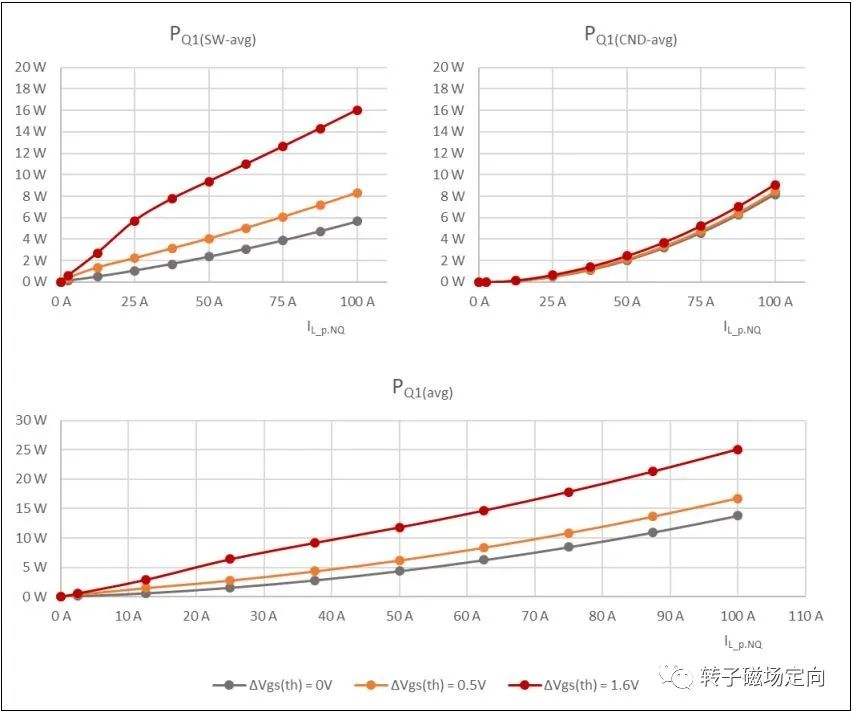
在 ∆VGS(th) =1.6 V 时,最热 MOSFET 的总体损耗增加值:
• IL_p.NQ = 25 A 时为 308%
• IL_p.NQ = 50 A 时为 169%
• IL_p.NQ = 100 A 时为 81%
在 ∆VGS(th) =0.5 V 时,最热 MOSFET 的总体损耗增加值:
• IL_p.NQ = 25 A 时为 77%
• IL_p.NQ = 50 A 时为 41%
• IL_p.NQ = 100 A 时为 21%
在6个 MOSFET 并联的情况下,对比以下 3 种不同的 VGS(th) 差异下的工况:

对损耗造成的差异如下图:
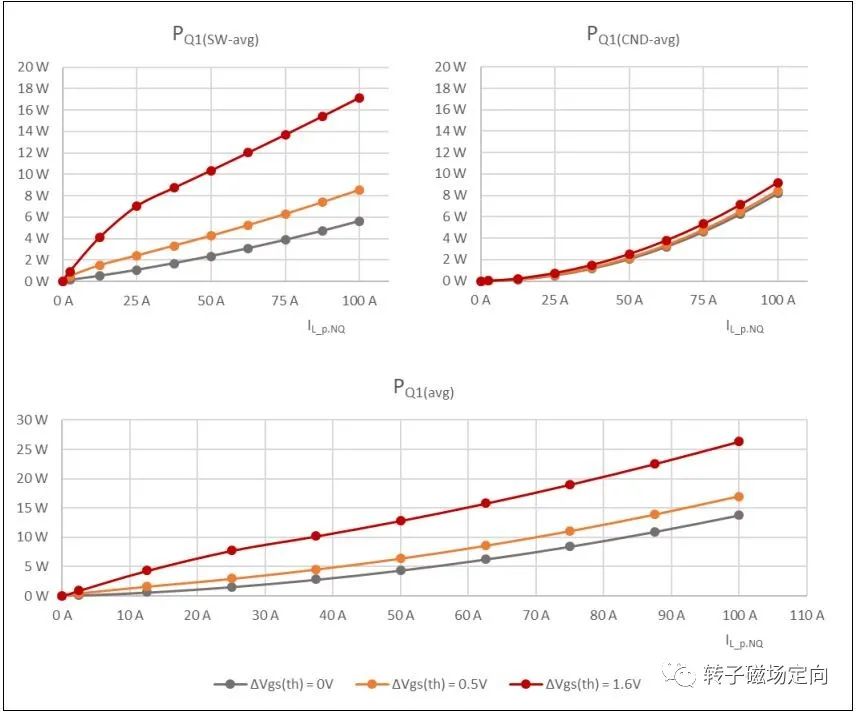
在 ∆VGS(th) =1.6 V 时,最热 MOSFET 的总体损耗增加值:
• IL_p.NQ = 25 A 时为 396%
• IL_p.NQ = 50 A 时为 193%
• IL_p.NQ = 100 A 时为 91%
在 ∆VGS(th) =0.5 V 时,最热 MOSFET 的损耗增加值:
• IL_p.NQ = 25 A 时为 90%
• IL_p.NQ = 50 A 时为 46%
• IL_p.NQ = 100 A 时为 23%
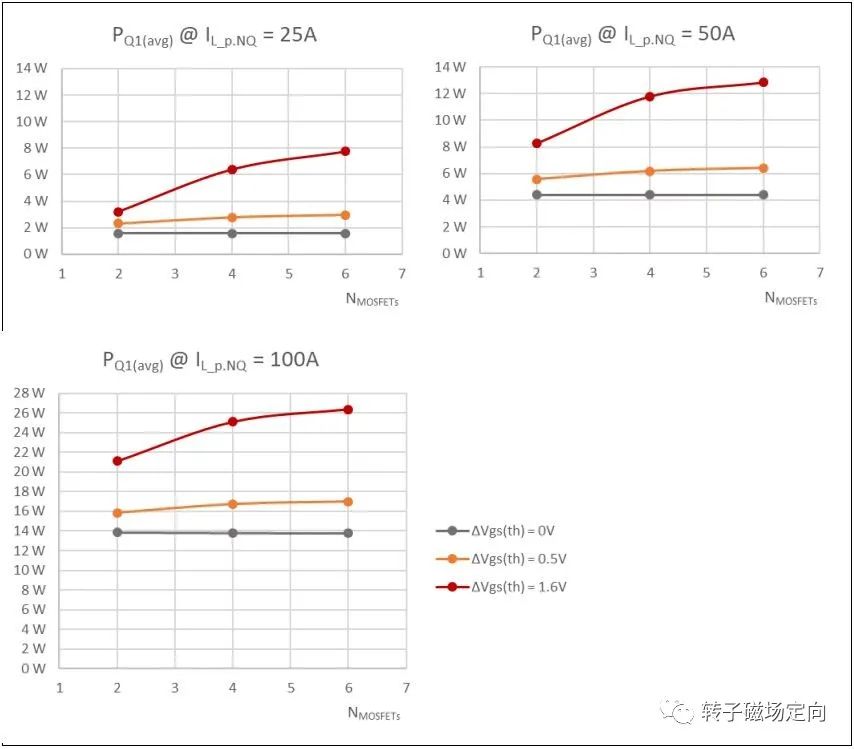
从前例中可以得出一个结论,并联 MOSFET 的数量越多,最热 MOSFET 上的应力就越大。下图显示了在不同的Id电流下,损耗随并联 MOSFET 数量增加而增加,也随VGS(th)的增加而增大。
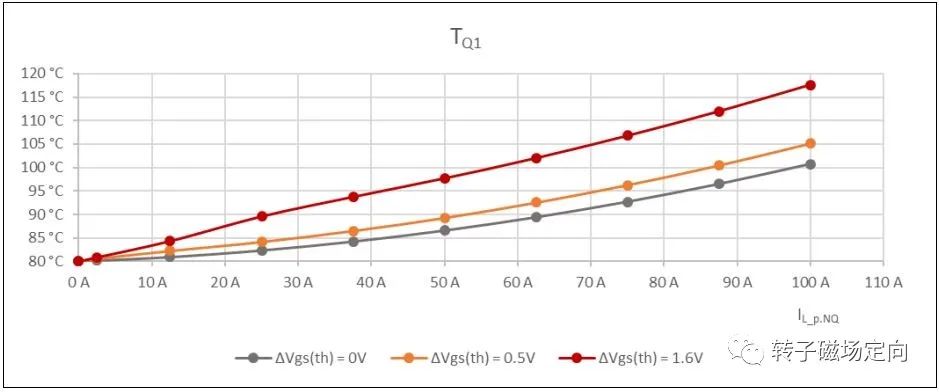
在明确损耗的基础上,假设散热器都是相同的壳温 Tc = 80°C,壳到结的热阻统一为 RthJH = 1.5K/W,那么可以估算出所有并联 MOS 的结温。
统一按照如下工况,依然是前述的半桥电路和损耗:
• fPWM = 10 kHz
• 占空比 = 50%
• RthJH = 1.5 K/W
• Ths = 80 °C

上图中,灰色表示完全均流的 MOS 结温,所有 MOS 结温相同。
假如系统允许 Tj(max) = 100°C,则输出电流将相应地受到限制:
• 在 ∆VGS(th) = 0 V 下 → IL(max)_p.NQ = 98 A
• 在 ∆VGS(th) = 0.5 V 下 → IL(max)_p.NQ = 90 A
• 在 ∆VGS(th) = 1.6 V 下 → IL(max)_p.NQ = 71 A
4 个并联 MOSFET:
• 在 ∆VGS(th) = 0 V 下 → IL(max)_p.NQ = 98 A
• 在 ∆VGS(th) = 0.5 V 下 → IL(max)_p.NQ = 86 A
• 在 ∆VGS(th) = 1.6 V 下 → IL(max)_p.NQ = 57 A

6 个并联 MOSFET:
• 在 ∆VGS(th) = 0 V 下 → IL(max)_p.NQ = 98 A
• 在 ∆VGS(th) = 0.5 V 下 → IL(max)_p.NQ = 85 A
• 在 ∆VGS(th) = 1.6 V 下 → IL(max)_p.NQ = 52 A
实际的实验中,随着结温的攀升,VGS(th)也会逐渐变化,所以需要对上述结果再进行迭代,进一步获取均流参数再次迭代计算损耗,进而估算结温。这种仿真因为计算量太大,可能导致不收敛,不在本文讨论范围内。
按照如下工况,使用SPWM调制方法来评估 MOS 损耗:

总平均损耗 (Ptot(avg)) 再次细分为开关损耗和传导损耗。
• PQ1(SW_avg) – MOSFET Q1 的平均开关损耗
• PQ1(CND_avg) – MOSFET Q1 的平均传导损耗
• PQ1(tot_avg) – MOSFET Q1 的总平均损耗(PQ1(CND_avg) 和 PQ1(SW_avg) 之和)


不同的门槛电压差异下,长时间导通的直流电流和马达交流应用的差异比较如下:


本文给出了不同工况和并联数量下,VGS(th) 不平衡对 MOS 并联的损耗,应力,结温的影响。先进的生产工艺,品质管控能力能显著提升 VGS(th) 批次一致性,更加适合并联。
参考文献:Infineon-PowerMOSFET_Paralleling_power_MOSFET_in_high_current_applications-ApplicationNotes-v02_01-EN
感谢您的耐心阅读。FOC提高班第三期已经正式启动报名,有意请私信。

行业杂谈:
为什么同一个公司搞管理的人一般要比搞技术的人收入高?
如何才能不让自己错过半导体的风口?
对个人而言,什么样的工作称得上是一份「好工作」?
为什么一些高学历还没低学历拿的钱多?
走进作者:
告别2022,展望2023
电机控制工程师如何拿高薪?
我的买房故事
月薪 4 万人民币是一种怎样的感受?
月入十万难吗?
专业文章:
什么是DPWM调制方式?
单电阻如何保护和采样有效值
解析NXP的无感FOC方案
Renesas无感FOC方案解析(上)
Renesas无感FOC方案解析(下)
德州仪器C2000还有市场吗?
2022年电控行业发展趋势
FOC学习的避坑指南
基于M0 MCU的无感FOC航模电机控制
MATLAB到底有多厉害?
基于磁链模型的非线性观测器

