最近特斯拉智能驾驶HW4.0电脑泄露的信息,表示特斯拉HW4.0竟然预留有毫米波雷达的百兆网接口,另外根据美国FCC雷达准入测试的公布信息,也表示特斯拉的毫米波雷达已经通过准入,而且特斯拉要求FCC保密到2月份其开始量产装车的时间,也就是说特斯拉在今年2月份开始生产的某些车型将装配此款雷达。
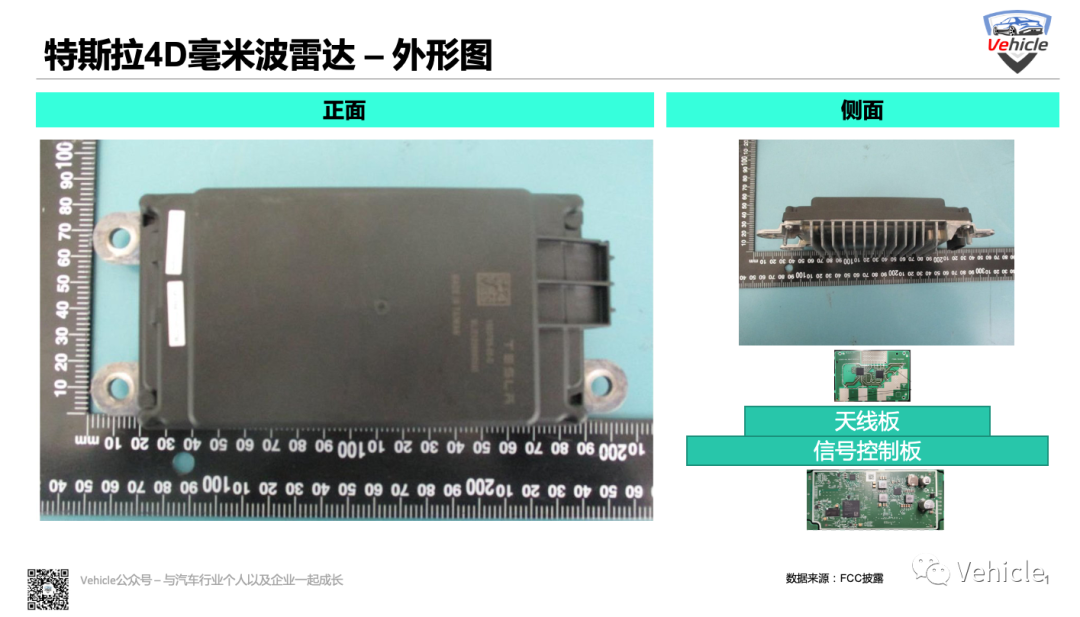
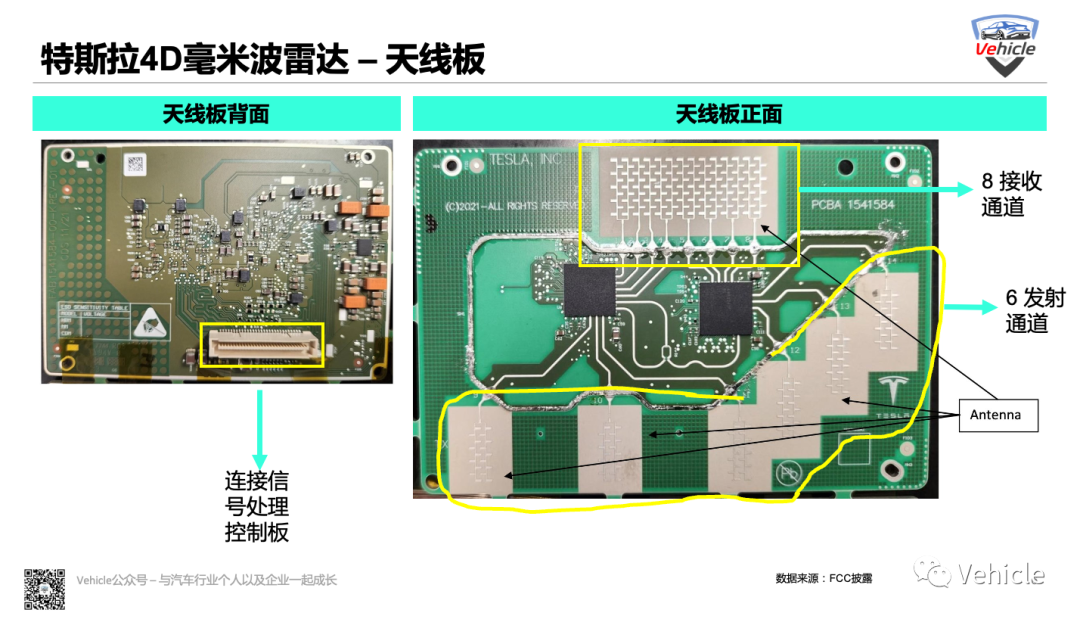
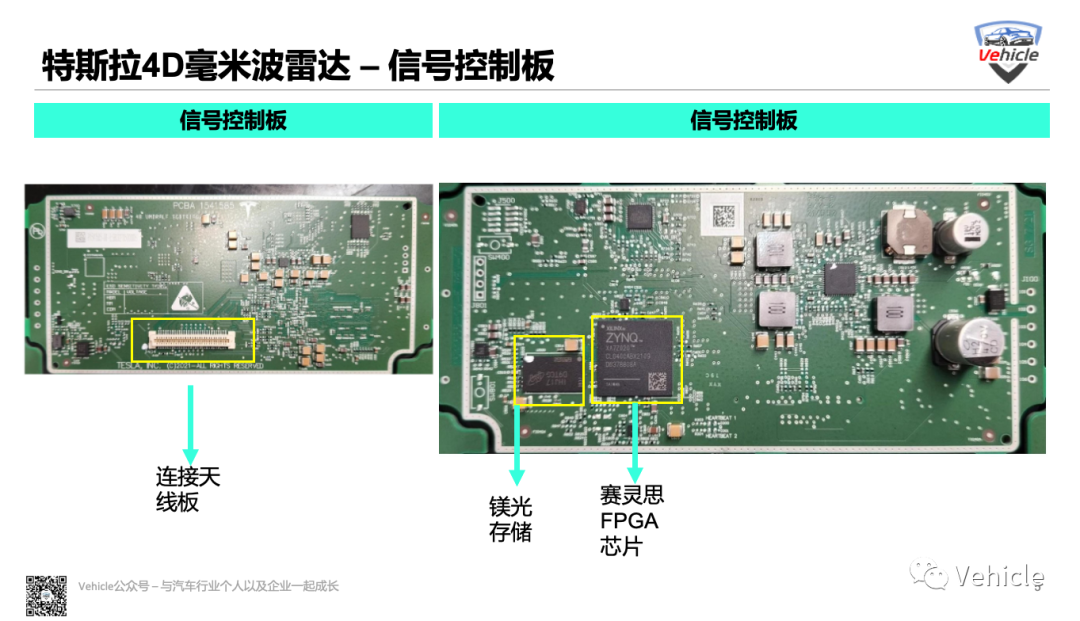
那么专注于人工智能视觉算法的特斯拉,这是要加毫米波雷达了?他的毫米波雷达有什么黑科技?主要用来做什么?供应商来自于哪家?会引发什么样的趋势?本文将根据FCC发布的特斯拉毫米波雷达信息结合自己经验尝试解析分享以上问题。其实特斯拉雷达回归之前很多传言版本,但大多数消息指向特斯拉采用的毫米波雷达不是普通的雷达,而是4D毫米波雷达,不少人推测特斯拉会使用以色列公司Arbe的4D毫米波雷达,那到底是不是采用了Arbe的4D毫米波雷达呢?FCC公布的测试雷达外形图,天线PCB,信号处理控制PCB三个主要图片信息如下:采用两颗TI毫米波传感器芯片,每个芯片3发4收,两颗就是6TX/8RX,共48个通道。传统最新毫米波雷达一般就是采用一颗芯片也就是3发4收,特斯拉这个4D毫米波雷达也算是丐版了,不过也符合特斯拉的成本控制,够用就好。所以通过天线也能确认,这不是之前推测Arbe的2304通道的4D毫米波。信号处理以及控制芯片采用赛灵思型号为Zynq XA7Z020的FPGA类芯片,FPGA芯片由于其高性能和灵活性,大量的并行结构,可以实现雷达大吞吐数据的计算,所以算法优化潜力很大。当然特斯拉很有可能就只用FPGA芯片做样件,毕竟FPGA开发灵活性高,但价格贵,马斯克算盘一打可能就不选了。另外按照之前网上披露HW4.0毫米波接口采用百兆以太网的信息,那么下图某块芯片应该还有以太网芯片。以上就为特斯拉在FCC上申请的雷达信息的硬件推测分析,所以可以肯定的是特斯拉此款雷达为48通道的4D毫米波雷达。首先,当特斯拉说要取消毫米波雷达时候,很多特粉一顿吹,特斯拉牛逼,马斯克第一性原理等等,其实同志们too young too simple,naive了。人类万年进化都是多种器官冗余,百年的汽车工业难道开启人工智能时代就想靠单传感器打天下?首先毫米波雷达在测距测速方面远比视觉系统准确可靠,是不可替代的存在,这个我在之前分享智能驾驶传感器系列的文章包括4D毫米波,激光雷达系列的文章都有讲过。当时特斯拉取消毫米波可能是两个原因,第一是特斯拉各种幽灵刹车事件与其毫米波雷达+视觉的方案有关联,另外一个可能是当时特斯拉毫米波雷达缺芯片。这次特斯拉启用4D毫米波雷达原因应该不会用其成像点云的概念,毕竟48通道丐版在那里,更多可能是通过4D的高度信息更好的识别静态物体,特别是桥类的场景,防止误刹等现象。显然根据我们之前文章《4D 成像毫米波雷达 - 101》这是典型的MIMO芯片级联方案的4D毫米波雷达,而且从通道数来讲48通道也是入门级,当然这个时候很有可能通过软件功底来补。特斯拉的魔性就在此,刚刚好的硬件做出体验差异化最大的产品。之前通过相关软件代码phoenix信息不少人推测来自于以色列公司Arbe的4D毫米波雷达,但根据新透露的特斯拉4D毫米波雷达的信息,好像不是,毕竟没有采用Arbe的芯片,所以可能不是来自于Arbe。但有人说Arbe 实际上并没有制造自己的雷达。他们拥有专利设计和算法,可以是他们提供算法运行在FPGA芯片上。但不管谁做的,这种4D毫米波的硬件却是非常简单,TI和NXP的毫米波雷达芯片和开发板提供是万无一失的,他们提供完整的底层软件,工具链也很容易上手,入行两三年的射频工程师基本可以搞定一个毫米波雷达单独设计。这也催生了国内一大批老将或者初创的毫米波雷达公司。特斯拉技术牛逼所以他自己做?肯定不是,马斯克是个异常精明的生意人,他要自己做无非是成本问题,目前同类产品优秀的是大陆的ARS540以及博世的,但价格不便宜成本应该要600RMB左右,在特斯拉决定自己搞一个的时候估计更贵。还有另外一个原因是听说大陆的4D毫米波雷达ARS540比较厚,在特斯拉前保上布置不下,如果需要修改汽车设计和模具,显然不符合成本管理。当然还有可能是功耗问题,目前市面上的4D毫米波的功耗都在20w左右或者以上,而特斯拉之前的毫米波雷达应该是毫瓦级别,功耗的改变都会影响电路PMIC的设计,所以特斯拉不得不自己动手制造自己的毫米波雷达。显然,如果之前文章《4D 成像毫米波雷达 - 101》讲到,2022年是4D毫米波上车的元年,而2023特斯拉的4D毫米波更会促进4D毫米波快速放量。4D毫米波向下会取代普通长距毫米波雷达,可以更好识别前方障碍物距离,速度以及运动状态,弥补好当红的视觉算法对距离和速度的弱势;另外4D毫米波雷达向上有潜力生成类似激光雷达的点云,从而有独当一面既能识别前方障碍物距离和速度还能向摄像头凭借AI算法识别物体。但Jack认为短时间可能取代传统长距毫米波雷达比较靠谱,至于类似激光雷达点云方案,可能从算法,开发生态以及和其他传感器的优势来比的话还有一段路要走。通过上面信息总结来看,如果没有猜错的话,特斯拉用这款4D毫米波的原因,主要考虑了4D毫米波雷达确实在前方障碍物速度,距离,静止以及速度状态的探测作用和优势,Jack觉得马斯克对视觉AI的痴迷可能不太会考虑4D毫米波点云等,另外还有考虑到4D毫米波雷达安装尺寸,功耗,价格几个方面的因素。目前看下来和特斯拉采用同样48通道类似方案的4D毫米波雷达方案应该主要自于国内供应商体系,传统大陆,博士等都倾向于更多通道例如192通道,国外的新势力们倾向于更高的通道实现点云效果例如mobileye方案。目前国内主要有福瑞泰克和森思泰克等采用了和特斯拉类似的48通道4D毫米波雷达,其中福瑞泰克的FVR40 4D毫米波雷达数据表现比较亮眼,最大距离达到300m,水平和垂直角分辨率都达到1° 而同类采用48通道基本都在2°左右。 
除了参数另外对主机厂友好的角度就是尺寸和价格,毕竟尺寸越小越薄款越容易被整车集成,价格更不用说了,从用芯成本角度来讲48通道的成本优势明显。
写在最后
4D毫米波雷达是智能驾驶传感器的另外一个热门的传感器,它多一个维度的优势向下可以升级当前传统毫米波雷达,向上凭借“点云”偷窥激光雷达的市场,这次通过特斯拉的助推,估计加速了替代传统毫米波雷达的节奏,至于向上偷窥激光雷达市场段时间内应该比较困难。
特斯拉新毫米波雷达FCC测试图片
加入我们的知识星球Vehicle 可以下载公众号海量参考资料包含以上参考资料。奔驰汽车软件系统MB.OS-功能体验,技术理念
- 智能驾驶要用多少个激光雷达?分别放在哪里?什么作用?