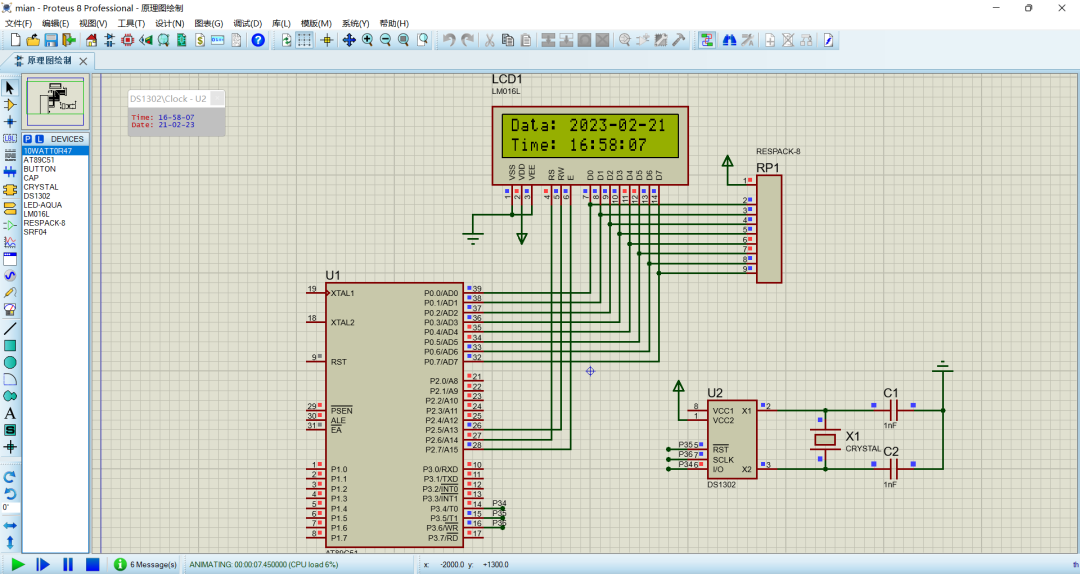
今天给大家推荐一个51单片机小实验,带你使用51单片机做一款简易的电子时钟,其中计时模块采用DS1302硬件模块,显示采用LCD显示屏,具体怎么实现开来一起看看吧!
DS1302 是 DALLAS 公司推出的涓流充电时钟芯片,内含有一个实时时钟和31字节静态 RAM,通过简单的串行接口与单片机进行通信。实时时钟、日历电路提供秒、分、时、日、周、月、年的信息,每月的天数和闰年自动补偿等多种功能。时钟操作可通过 AM/PM 指示,DS1302 与单片机之间能简单地采用同步串行的方式进行通信,简易三线SPI通信模式:
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如MSP430单片机系列处理器。
DS1302时钟芯片的工作原理如下:
以下是使用51单片机驱动DS1302时钟芯片的代码,具体实现步骤如下:
void DS1302Init() {
// 初始化DS1302时钟芯片
DS1302WriteByte(0x8E, 0x00);
// 关闭写保护
DS1302WriteByte(0x90, 0x00);
}
void DS1302ReadTime(unsigned char *p) {
// 读取DS1302时钟芯片的时间
unsigned char i;
DS1302WriteByte(0xBF, 0x00);
for (i = 0; i < 7; i++) {
p[i] = DS1302ReadByte();
}
}
void DS1302WriteTime(unsigned char *p) {
// 设置DS1302时钟芯片的时间
unsigned char i;
DS1302WriteByte(0xBE, 0x00);
for (i = 0; i < 7; i++) {
DS1302WriteByte(p[i], 0x00);
}
}
// 从DS1302读取一个字节的数据
void DS1302ReadByte(uchar *dat) {
uchar i;
for (i = 0; i < 8; i++) {
SCLK = 0;
_nop_();
*dat |= IO << i;
SCLK = 1;
_nop_();
}
}
DS1302时钟芯片有31个字节的RAM空间,可以用来存储一些数据。在实际应用中,我们可能需要读取这些存储的数据。读取DS1302的RAM和读取寄存器类似,也需要先向DS1302发送读取RAM的命令,然后再读取RAM的内容。
读取DS1302的RAM需要使用到DS1302的另一个引脚——CE(片选使能)引脚,该引脚在读写DS1302的RAM时需要保持为低电平。读取RAM的过程如下:
向DS1302写入读取RAM的命令:0x61。DS1302会自动切换到RAM读取模式,准备将RAM中的数据传输给单片机。
DS1302Write(0x61); // 发送读取RAM命令
发送读取RAM命令后,就可以读取RAM中的数据了。读取RAM的数据需要先读取DS1302的数据引脚(IO引脚)上的高电平脉冲,然后再读取8个位的数据。具体的读取过程可以使用DS1302ReadByte函数实现,该函数会读取一个字节的数据。
for (i = 0; i < 31; i++) {
DS1302ReadByte(&byte); // 读取一个字节的数据
ram[i] = byte; // 存储到数组中
}
读取完RAM后,我们可以将其存储到一个数组中,方便后续的使用。
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit SCLK = P2^0;
sbit IO = P2^1;
sbit CE = P2^2;
uchar ds1302_read_ram(uchar address)
{
uchar i, dat;
CE = 0;
_nop_();
SCLK = 0;
_nop_();
CE = 1;
_nop_();
IO = 0; // 写指令
SCLK = 0;
_nop_();
SCLK = 1;
_nop_();
IO = address | 0xc0; // 选择地址并读取 RAM
for (i = 0; i < 8; i++) {
SCLK = 0;
_nop_();
SCLK = 1;
_nop_();
}
IO = 0; // 接收数据
for (i = 0; i < 8; i++) {
dat >>= 1;
if (IO) dat |= 0x80;
SCLK = 0;
_nop_();
SCLK = 1;
_nop_();
}
CE = 0;
return dat;
}
在上述代码中,ds1302_read_ram 函数接收一个参数 address,用于指定要读取的 RAM 地址,返回一个字节表示该地址处的 RAM 数据。
该函数的具体实现过程如下:
需要注意的是,读取 RAM 数据时需要将地址的最高位(即 bit7)置为 1,以表示要读取 RAM。另外,在读取数据位时需要依次进行 8 次时钟上升沿,且每次读取时需要先右移数据,再将新数据左移并或上读到的数据位。
下面是使用51单片机和DS1302时钟芯片实现的简易电子时钟的代码实现。代码中包含了DS1302的初始化、时钟读取、RAM读写等基本功能。
#include
#include "LCD1602.h"
#include "DS1302.h"
#define uchar unsigned char
#define uint unsigned int
sbit beep=P3^6; //定义蜂鸣器接口
void main()
{
uchar year, month, day, hour, minute, second; //年月日时分秒
uchar str_data[11], str_time[11]; //用于存放LCD上显示的日期和时间
LCD_Init(); //初始化LCD显示屏
DS1302_Init(); //初始化DS1302时钟芯片
//将时间初始化为2023年2月21日0时0分0秒
DS1302_Write(0x8e,0); //关闭写保护
DS1302_Write(0x80,0x23); //年份
DS1302_Write(0x82,0x02); //月份
DS1302_Write(0x84,0x21); //日期
DS1302_Write(0x86,0x00); //时钟
DS1302_Write(0x88,0x00); //分钟
DS1302_Write(0x8a,0x00); //秒钟
DS1302_Write(0x8e,0x80); //开启写保护
while(1)
{
//读取DS1302时钟芯片中的年月日时分秒
year = DS1302_Read(0x80);
month = DS1302_Read(0x82);
day = DS1302_Read(0x84);
hour = DS1302_Read(0x86);
minute = DS1302_Read(0x88);
second = DS1302_Read(0x8a);
//将年月日时分秒转换成字符串
sprintf(str_data, "Data: 20%02x-%02x-%02x", year, month, day);
sprintf(str_time, "Time: %02x:%02x:%02x", hour, minute, second);
//在LCD上显示日期和时间
LCD_Write_String(0,0,str_data);
LCD_Write_String(0,1,str_time);
Delay_Ms(1000); //延时1秒
}
}
推荐阅读
01 |加入嵌入式交流群 |
02 |嵌入式资源获取 |
03 |STM32中断优先级详解 |
04 |STM32下载程序新思路--使用串口下载程序 |