伴随着人工智能技术的不断发展与进步,如何让相关技术再有新的突破,从当前的局部智能,迈向更先进的通用智能,这是所有人工智能行业从业者的共同目标。人工智能技术的发展不仅要推动算力、算法和数据的发展,也要推动硬件设施与应用场景的突破;不仅能够服务高精尖的科研场所,也要贴近日常生活的百姓家;不仅能驱动工业发展,也要细致入微融入行业应用中。为了面对未来社会事业、人类发展的刚性需求,未来需要懂知识、善学习、能进化的机器人。
正是基于这样的背景,科大讯飞(苏州)科技有限公司将本次比赛的主题定义为“智慧农业”,以人工智能技术驱动智能车,让车能听能看能思考,让Ta不仅仅只是“车”。此外,我们也希望通过本次比赛的圆满举办,推动机器人(人工智能)相关专业在高校的人才培养体系建设,为上下游的产业生态伙伴储备优秀人才。
本次比赛旨在通过赛事以及相关的赛前培训培养学生的机器人相关专业基础知识以及团队协作能力。比赛所涉及知识点涵盖了移动机器人领域的SLAM、组合导航、路径规划等被广泛应用的机器人技术,并且与人工智能领域相关的自然语言处理、深度学习、机器视觉等内容做了融合。
本次比赛所涉及知识点涵盖了移动机器人领域的SLAM、组合导航、路径规划等技术,并且与人工智能领域相关的自然语言处理、深度学习、机器视觉等内容做了融合。
选手在参赛前,需掌握移动机器人和人工智能相关基础理论知识,如:Linux 、ROS相关工具及操作系统的操作基础。
1、讯飞创意组比赛作为智能车竞赛的创意比赛面向全国全日制在校研究生、本科生和职业院校学生。
2、每支队伍选手不超过5人(其中最多1名研究生),指导老师不超过2人。
3、参赛队以学校为单位进行报名,选拔赛阶段每个学校可参加的队伍数量限制见后续通知。比赛分本科和职业院校两个组别,报名时须明确参加的组别。
4、每位学生可同时参加竞速组别和创意组别的比赛,但在三个创意组别内只可报名其中一个。
5、参赛选手报名须保证所提供的个人信息真实、准确、有效,否则取消选手参赛资格。
本次比赛设定的场景为农业巡检机器人(智能车)在智慧农场场景下,根据主人的要求,完成语音交互、植保巡检、果实状态检测、信息传递等工作。选手需根据比赛具体要求,开展智能车相关功能的调试,使其在指定场地中完成工作。
本次比赛基于嵌入式计算平台,参赛选手需预装Ubuntu18.04或Ubuntu20.04操作系统,其他预装软件包括但不限于TensorFlow、TensorRT、ROS。
比赛场地平面总尺寸为6m6m由单片30cm50cm(高*长)的PP塑料挡板构成,设有智能车启动区、农作物识别区、果实识别区、停车区等。赛场内会随机设置若干个障碍板/小型障碍物。
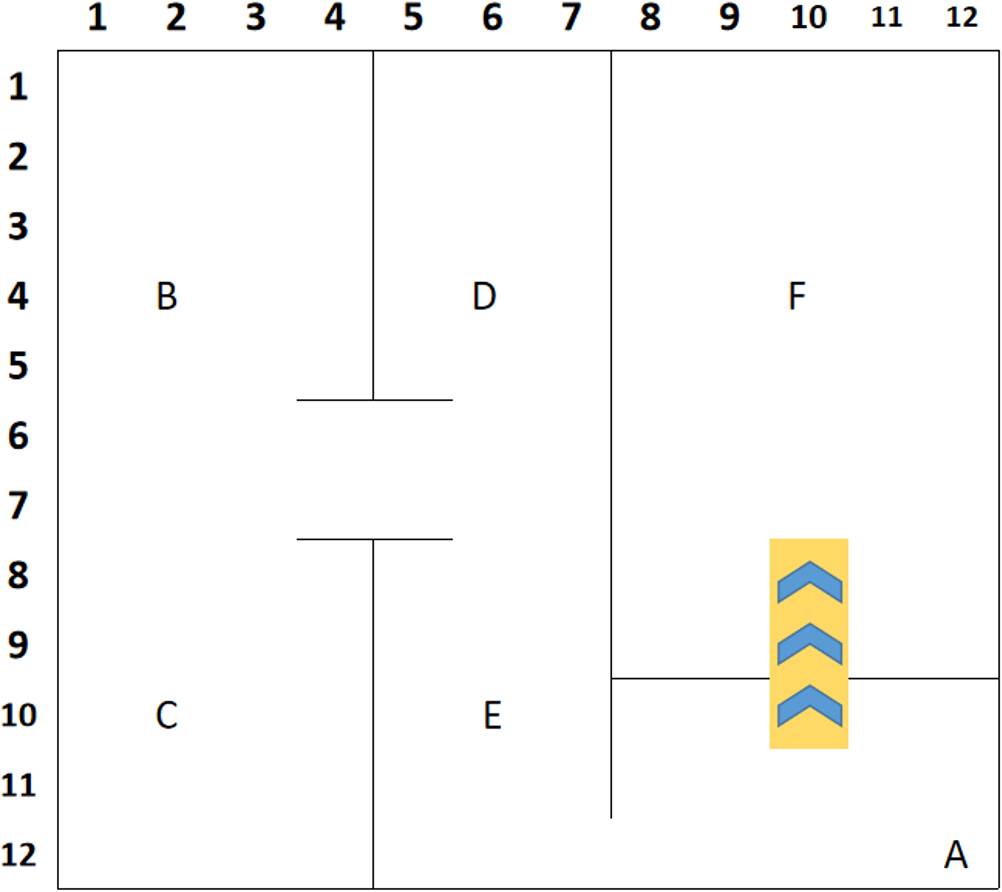
▲ 图3.1 比赛场地示意图注:
1) 场地分隔板材之间的连接方式如下图所示,为上下各一个直径70mm的圆柱形连接件,在进行竞赛时注意保持安全距离。

▲ 图3.2 场地分割板材示意图2) 果实识别区(F区)与其他区域使用如下图所示的坡道进行连接。
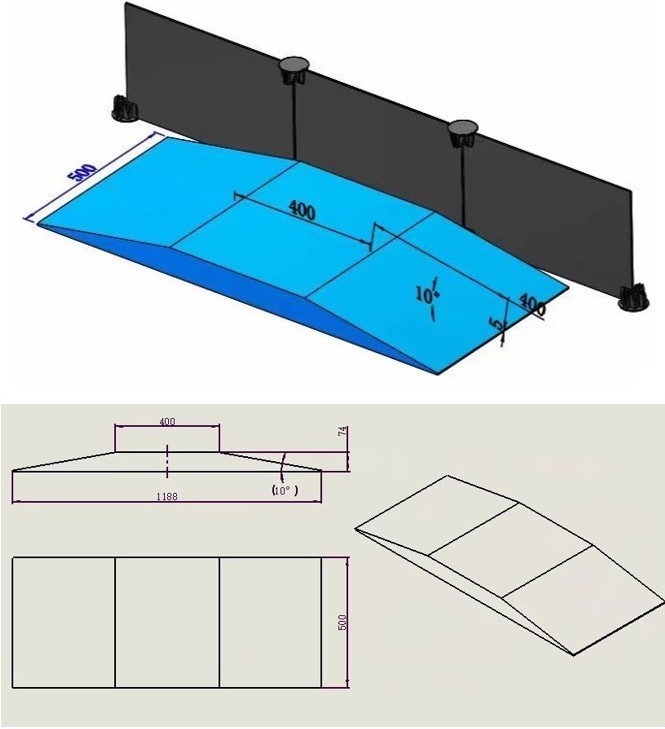
▲ 图3.3 连接坡道示意图每次比赛中会设置3个障碍物,每次挑战,车模运行时要避开障碍物,否则比赛时会有相应处罚,障碍物位置会在障碍区中随机摆放的,但会保证最小可通过距离不小于50cm。
关于障碍物:
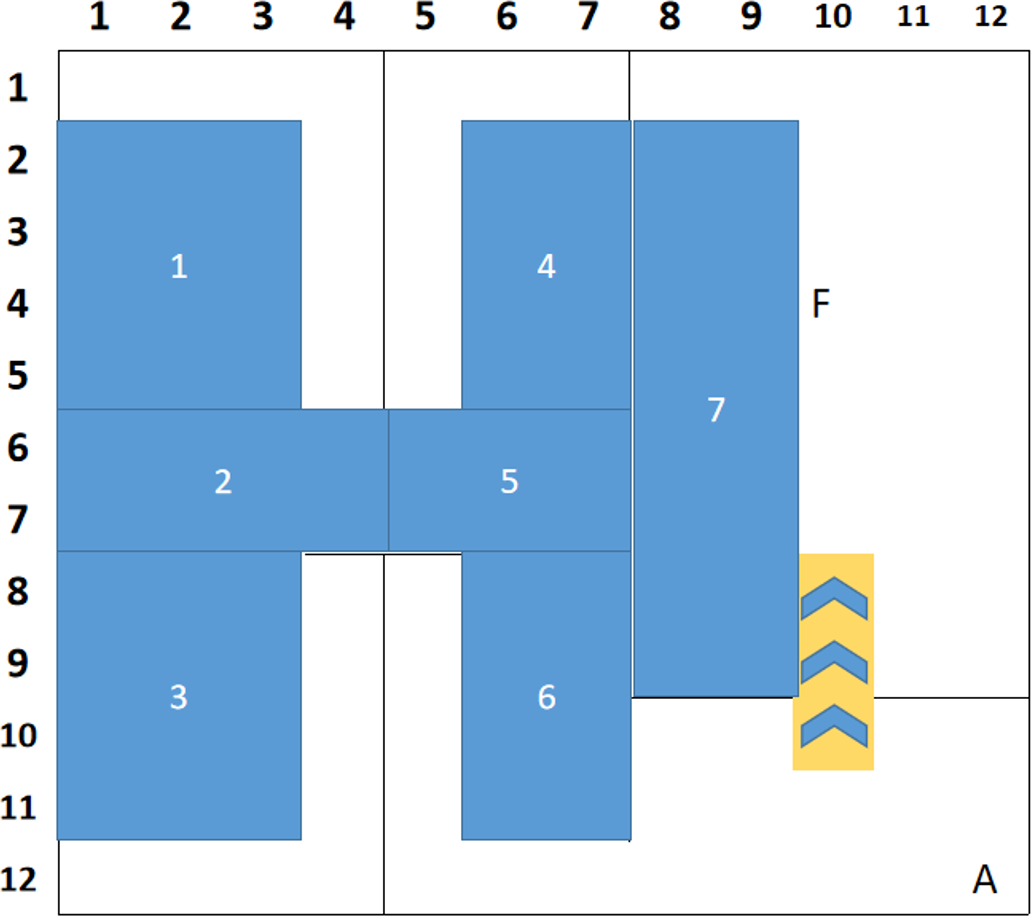
▲ 图3.4 障碍物示意图□ 例如:队长会抽取的结果为1、2、3、4区域,则在选手参赛时的三次挑战中会遇到1+2+3、1+2+4、2+3+4、1+3+4四种组合中的三种,但是每个组合的出现顺序随机。
本次竞赛仅允许使用,讯飞U-CAR-mini版本或讯飞U-CAR-02版本的车模。两版本车模均禁止进行增加、去除、修改控制器、执行器、传感器、电池等改装操作。
□ 产品外观

▲ 图3.5 讯飞 U-CAR-mini版本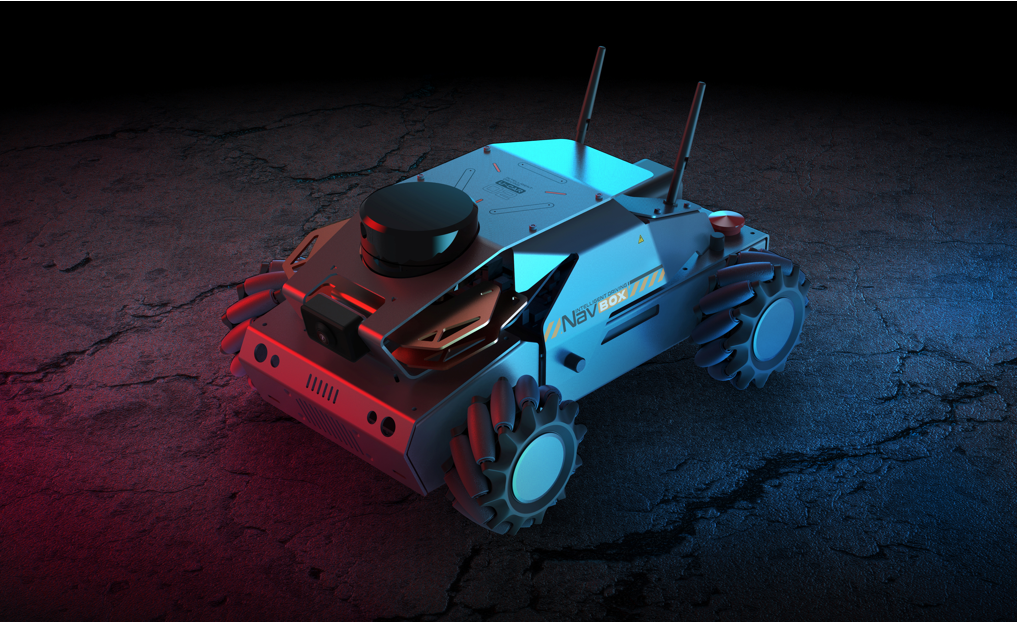
▲ 图3.6 讯飞 U-CAR-02 版本□ 产品规格
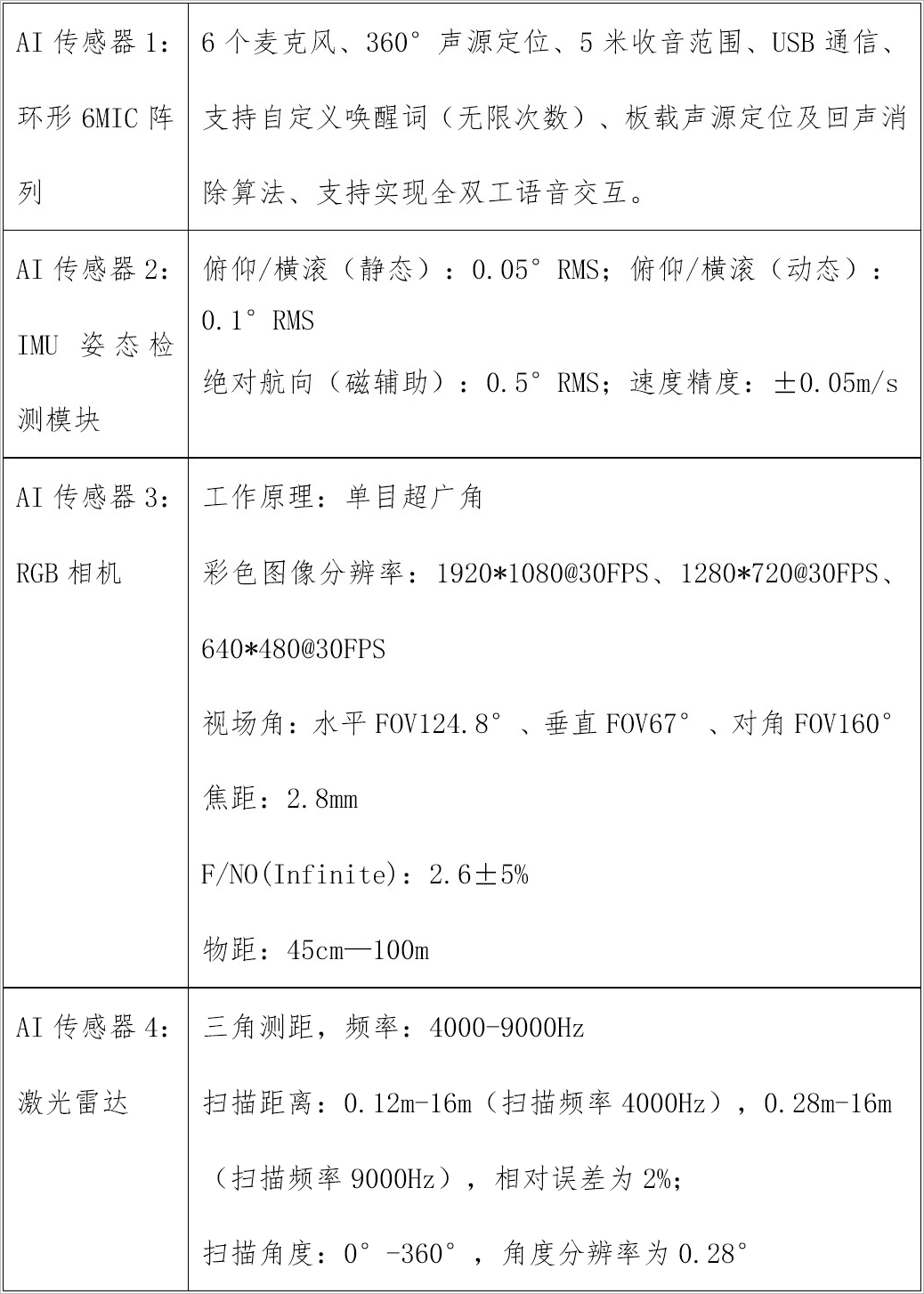
车体平台(车体、上位机Jetson Nano处理器、麦克风阵列、IMU惯导模块、单目摄像头、激光雷达、下位机STM32F4控制器、电机、麦克纳姆轮)1套、电池充电器1套。
▲ 图3.7 U-CAR-mini 产品规格车体平台(车体、上位机RK3588s处理器、麦克风阵列、IMU惯导模块、单目摄像头、激光雷达、下位机GD32F4控制器、电机、麦克纳姆轮)1套、电池充电器1套。
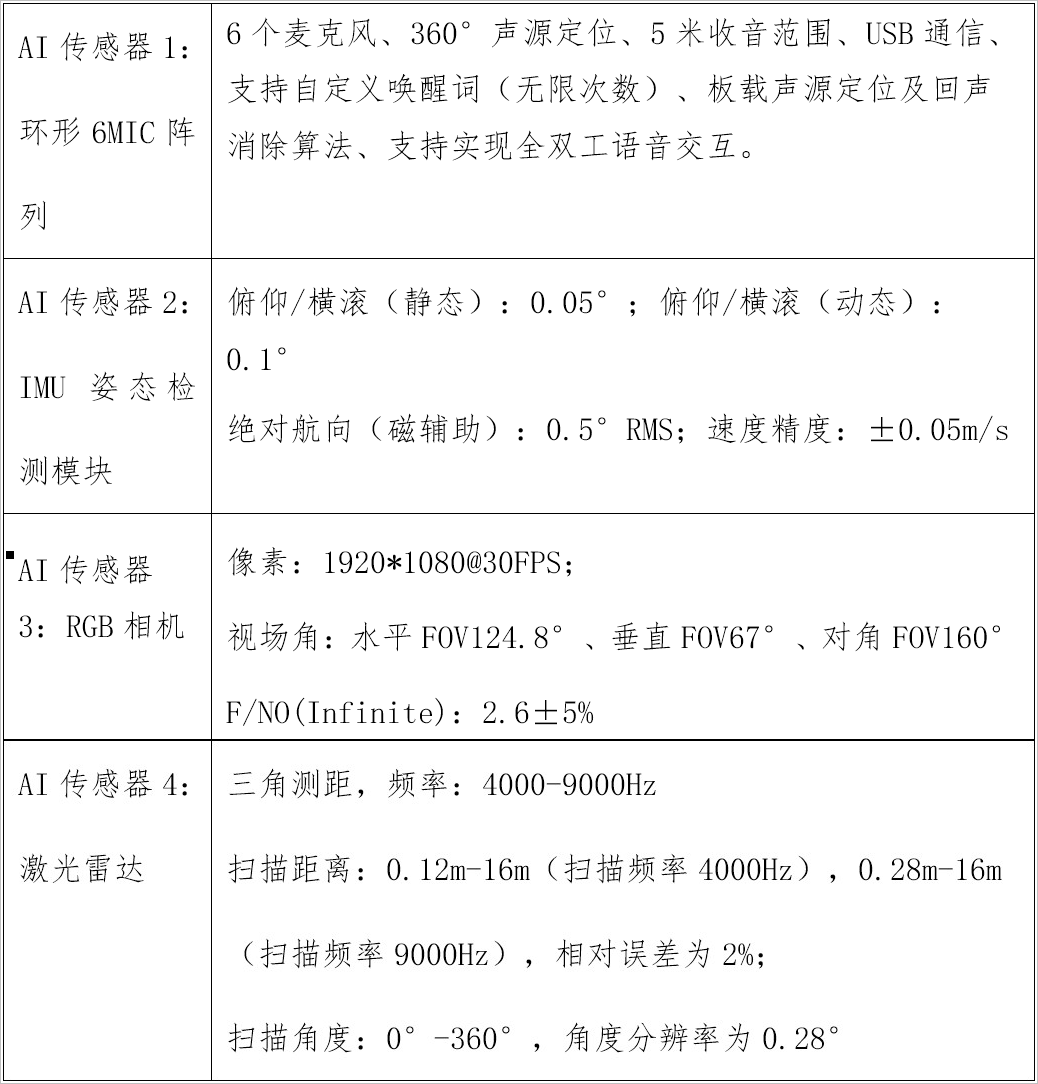
▲ 图3.8 U-CAR-02 产品规格注:
1)任务2、3完成顺序不限定,在完成2、3任意一个任务后,无需返回起点,继续执行剩余任务即可。
2)任务2视为四个子任务,不同区域间的结果独立记分。
规则详情:
在任务中可语音协助小车脱困或控制小车移动,但是不可经由控制命令将比赛任务传达给小车,在停泊区禁止使用,每场不得超过3次;需将使用的命令写在操作手册中。
任务2、3智能车完全进入区域,视为完成任务,到达各区域的先后顺序可自行调整。
B\C\D\E四个区域可能种植的作物为:水稻、小麦、玉米、黄瓜。
注:
1)B\C\D\E四个区域在种类抽取时将视作独立事件,区域之间的抽取结果相互独立,即可能会出现重复种类的情况。
2)每个区域内放置5块标识板,其中会有1块为干扰标识板。
F区域内可能存在玉米、黄瓜、西瓜等果实,在比赛时该区域内会放置5块标识板,其中包含2种对应的果实,智能车需识别该区域中数量最多的果实并计算数量。
2个轮子在停泊区域内视为未完成停泊,3个轮子在停泊区域内视为未完全完成停泊,4个轮子均在停泊区域内视为完成停泊。
任务5视为6个记分点,B\C\D\E四个区域识别结果分别记分,F区域品种识别、数量识别分别记分。
语音播报格式为:“任务完成,B区域种植的作物为XXX,C区域种植的作物为XXX,D区域种植的作物为XXX,E区域种植的作物为XXX,F区域存放的果实为XXX,数量为XXX个。”语音播报需在停车完成后的30秒内开始播报,60秒内完成播报。
参赛队伍需提交参赛代码包、镜像文件、技术报告至组委会。提交方法在开赛前分发至各参赛队。
比赛过程中出现违规或异常情况按照以下方式处理:
1) 裁判发令后,机器人在 60秒内没有启动,比赛得分记为 0 。
2) 机器人冲出场地、机器人失控则比赛结束,当前得分作为最终得分。
3) 机器人完成赛题任务过程中,停止运行超过60秒,比赛立即结束,当前成绩记为本次比赛最终成绩。
4) 机器人触碰围栏或障碍物连续超过30秒,比赛结束,以当前成绩记为比赛最终成绩。
其他未尽事宜,组委会有最终解释权。
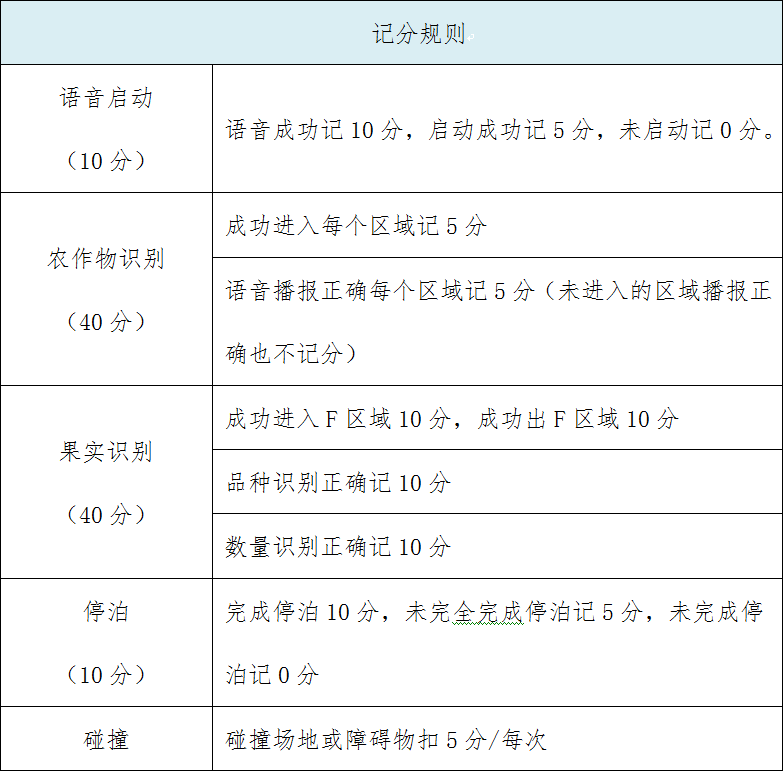
▲ 图3.4.1 计分规则注:根据比赛分数进行排名,同分数的队伍按比赛完成时间倒序排名
本次赛事相关培训资料、规则解读等在讯飞机器人开放平台-机器人学院持续更新(http://www.iflyros.com/)。参赛选手可在机器人学院获取相关课程资源。
赛事后续通知及规则补充,请关注全国大学生智能汽车竞赛官网,苏州讯飞公众号、讯飞机器人开放平台(www.iflyros.com)等。
