

1 测风雷达原理

测风激光雷达是实现全球风场信息探测最为有效的方法。其将激光用作载波信号,通过和大气中的气溶胶微粒以及大气分子发生相互作用,最后产生回波信号。与微波雷达和多普勒声雷达相比,测风激光雷达在晴空探测时,其探测范围更广、精度更高、响应速度更快。与此同时,它还能获取三维廓线内的风场信息。
国内测风激光雷达公司主要有
1.1 多普勒技术
多普勒效应 (Doppler effect) 是为纪念奥地利物理学家及数学家克里斯琴·约翰·多普勒(Christian Johann Doppler)而命名的,他于1842年首先提出了这一理论。主要内容为物体辐射的波长因为波源和观测者的相对运动而产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高(蓝移blue shift);在运动的波源后面时,会产生相反的效应。波长变得较长,频率变得较低(红移red shift);波源的速度越高,所产生的效应越大。根据波红(或蓝)移的程度,可以计算出波源循着观测方向运动的速度。
激光多普勒测风技术是一种利用大气中气溶胶对激光后向散射回波的多普勒频移效应来实现对大 气风场分布的非接触式测量方法。。激光多普勒测风雷达依据激光对大气散射的多普勒频移而设计工作原理如图1所示
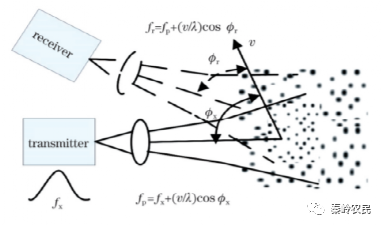
图1 多普勒激光测风雷达工作原理图
其中频率为 的发射激光束被气溶胶粒子散射,c为光束,λ为激光波长。设气溶胶粒子沿着视线方向的相对速度为V,则到达气溶胶粒子的光频率为
的发射激光束被气溶胶粒子散射,c为光束,λ为激光波长。设气溶胶粒子沿着视线方向的相对速度为V,则到达气溶胶粒子的光频率为
 (1)
(1)
频率为f1的光经过气溶胶粒子的反射后,到达探测器的光频率为
 (2)
(2)
因此产生的多普勒频移为
 (3)
(3)
若光学系统和风速矢量方向有一定夹角为θ则,
 (4)
(4)
所以,通过接收器得到多普勒频移,从而测得径向风速。
测风激光雷达的技术方法有很多,按照探测方式可分为直接运动探测技术与相干探测测风技术;按照光源的不同可分为连续激光和脉冲激光;
1.2 直接探测
基于直接探测技术的激光多普勒测风雷达采用光谱分析方式鉴频,直接采用光频鉴频器或光谱分析仪,通过对接收信号与发射信号的相对能量变化来测量 频移,从而实现对风速多普勒信号的测量。直接探测激光多普勒测风技术主要有条纹(成像)技术和边缘技术。
条纹技术是利用干涉形成的条纹移动来测量频率的变化,主要采用FP标准具或斐索(Fizeau)干涉仪产生唤醒条纹或线性条纹。
边缘技术是利用窄带鉴频器,如FP标准具,MZ干涉仪,光栅等,或利用各种原子,分子滤波器,如碘滤波器,钠,钾,银蒸汽滤波器等,将频率信号的变化转化为相对能量信号的变化来测定多普勒频移。
测风激光雷达的技术方法有很多,按照探测方式可分为直接运动探测技术与相干探测测风技术;按照光源的不同可分为连续激光和脉冲激光;
1.3 连续多普勒激光雷达
通过步进电机控制的发射系统发射的激光聚焦于某一风层区域,在聚焦区域内的气溶胶颗粒对激光进行后向散射,其后向散射光频率会发生多普勒频移,频移变化量即是该点气溶胶颗粒物的速度,也即是风速。后向散射光经接收望远镜收集后再经过后继光路与本振光进行外差混频,最后聚在光电探测器上。在连续 波激光雷达中,高度信息通过纯几何途径获得。
1.4 脉冲多普勒激光雷达
脉冲多普勒激光雷达的距离和气体传统激光雷达一样,通过激光发射出光子的飞行时间来确定。在有风的情况下,大气溶胶粒子和空气分子相对于光源运动,其相对于光源的运动速度,运动方向和散射角不同,回拨信号相对于发射激光的多普勒频移就不同。
对于不同方向进行扫描得到响应的径向速度,假设风场是均匀的情况下,通过三维风场分解与合成即可得到风速和风向。
1.5 相干多普勒测风激光雷达
相干测风激光雷达利用单频窄线宽激光器发射激光脉冲,与大气中的气溶胶粒子发生相互作用后产生带有多普勒频移的回波信号,通过望远镜系统收集的大气回波信号并与本征激光信号相干拍频,完成多普勒频移信息提取,通过矢量风速反演技术获得大气三维风场信息。
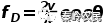
典型的全光纤脉冲相干激光雷达的结构如图2所示,。
图2 全光纤脉冲相干激光雷达的结构
全光纤相干多普勒测风激光雷达系统可以分为激光光源模块、发射接收模块及后期的信号处理模块。在激光出射模块,连续波(CW)激光器产生中心频率为 的线偏振光,经分束器(Splitter)分为出射激光和本振光,出射激光经声光调制器(AOM)调制为脉冲光,并产生
的线偏振光,经分束器(Splitter)分为出射激光和本振光,出射激光经声光调制器(AOM)调制为脉冲光,并产生 的频移,再由放大器(EDFA)进行功率放大,经环形器1端口到2端口,再到望远镜出射。设风场对脉冲光产生的多普勒频移为
的频移,再由放大器(EDFA)进行功率放大,经环形器1端口到2端口,再到望远镜出射。设风场对脉冲光产生的多普勒频移为 ,则回波信号中心频率为
,则回波信号中心频率为 。在接收机模块,回波信号经过环形器2端口到3端口,在耦合器(Coupler)与本振光合束,两者的拍频信号经平衡探测器转换为频率为
。在接收机模块,回波信号经过环形器2端口到3端口,在耦合器(Coupler)与本振光合束,两者的拍频信号经平衡探测器转换为频率为  的射频电信号,再经采集卡采样和后续电路数据处理分析得到风场信息。使用基于出射激光脉冲的飞行时间法,可以得到不同距离处的风场信息。
的射频电信号,再经采集卡采样和后续电路数据处理分析得到风场信息。使用基于出射激光脉冲的飞行时间法,可以得到不同距离处的风场信息。
