
2.解码程序

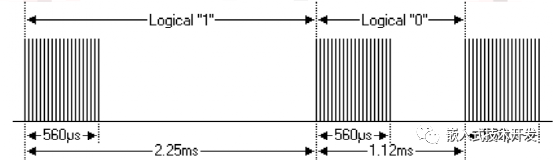
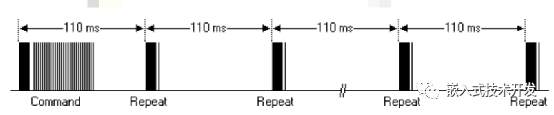
uint32_t TIM3_Over_Cnt = 0;//tim3溢出次数uint32_t TIM3_Sum_Cnt = 0;//两次下降沿之间的时间间隔uint32_t cnt0 = 0;uint8_t IR_Data[60];void TIM3_IRQHandler(void){/* USER CODE BEGIN TIM3_IRQn 0 *//* USER CODE END TIM3_IRQn 0 */// HAL_TIM_IRQHandler(&htim3);/* USER CODE BEGIN TIM3_IRQn 1 */if(__HAL_TIM_GET_FLAG(&htim3, TIM_FLAG_UPDATE)) //定时器溢出中断{__HAL_TIM_CLEAR_FLAG(&htim3, TIM_FLAG_UPDATE); //清除中断标记TIM3_Over_Cnt++;}cnt0 = __HAL_TIM_GET_COUNTER(&htim3);TIM3_Sum_Cnt = (TIM3_Over_Cnt << 16) + cnt0;//获取计数器的值__HAL_TIM_SetCounter(&htim3,0);//清零重新计数TIM3_Over_Cnt = 0;//清零重新计数if (__HAL_TIM_GET_FLAG(&htim3, TIM_FLAG_CC1) != RESET)//TIM3CH1捕获中断{if(StartRevFlag == 1)//接收到引导码,开始解码{if(TIM3_Sum_Cnt > 36000)//大于36ms认为是结束{RevComplete = 1;//解码完成IR_Tick = 0;}else if(RevComplete == 0){if(TIM3_Sum_Cnt > 1000 && TIM3_Sum_Cnt < 1300)//1ms~1.3ms认为是低电平IR_Data[IR_Idx] = 0;else if(TIM3_Sum_Cnt > 2100 && TIM3_Sum_Cnt < 2400)//2.1ms~2.4ms认为是高电平IR_Data[IR_Idx] = 1;else //接收错误,重新开始StartRevFlag = 0;IR_Idx++;if(IR_Idx > 59)IR_Idx = 59;}}else{if(TIM3_Sum_Cnt > 13000 && TIM3_Sum_Cnt < 14000)//13~14ms引导码{StartRevFlag = 1;}IR_Tick = 0;RevComplete = 0;//解码完成标志置零IR_Idx = 0;//有效解码位TIM3_Over_Cnt = 0;TIM3_Sum_Cnt = 0;//定时器计数清零}__HAL_TIM_CLEAR_IT(&htim3, TIM_IT_CC1);}/* USER CODE END TIM3_IRQn 1 */}
void IR_Rev(){uint8_t num = IR_Idx / 8;uint8_t IRValue[8];if(RevComplete == 1 && StartRevFlag == 1 && IR_Tick > 20){if(num > 7)num = 7;for(uint8_t j=0;j{for(uint8_t i = 0;i< 8;i++){IRValue[j] = IRValue[j]>>1;if(IR_Data[j*8+i])IRValue[j] |= 0x80;}}if(IRValue[0] == 0x00 && IRValue[1] == 0xFF)//地址码正确{switch(IRValue[2])//判断数据码{case 0x46:KeyValue = S_key_Menu;break;case 0x43:KeyValue = S_key_Set;break;case 0x40:KeyValue = S_key_Rst;break;case 0x15:KeyValue = S_key_Down;break;case 0x09:KeyValue = S_key_Up;break;}}StartRevFlag = 0;RevComplete = 0;IR_Tick = 0;}}
推荐阅读:
【开源项目】SFUD--通用串口Flash驱动库的移植和使用
STM32CubeMX系列教程
开源自己做的4.3寸触摸屏,SWM32单片机+LVGL
四位数显表头设计
几种RS485隔离通讯的方案介绍
