

首先看一下原子操作,原子操作就是指不能再进一步分割的操作,一般原子操作用于变量或者位操作。假如现在要对无符号整形变量 a 赋值,值为 3,对于 C 语言来讲很简单,直接就是: a=3
但是 C 语言要先编译为成汇编指令, ARM 架构不支持直接对寄存器进行读写操作,比如要借助寄存器 R0、 R1 等来完成赋值操作。假设变量 a 的地址为 0X3000000,“a=3”这一行 C语言可能会被编译为如下所示的汇编代码:
ldr r0, =0X30000000 /* 变量 a 地址 */
ldr r1, = 3 /* 要写入的值 */
str r1, [r0] /* 将 3 写入到 a 变量中 */
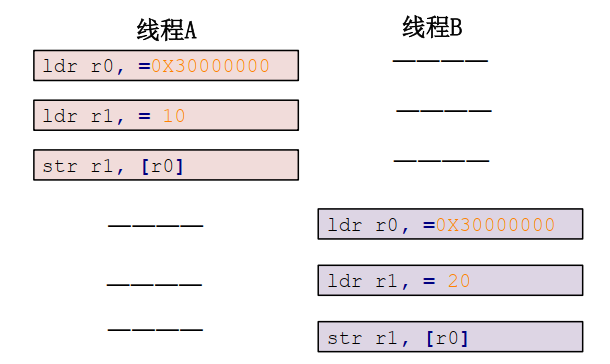
示例代码 只是一个简单的举例说明,实际的结果要比示例代码复杂的多。从上述代码可以看出, C 语言里面简简单单的一句“a=3”,编译成汇编文件以后变成了 3 句,那么程序在执行的时候肯定是按照示例代码 中的汇编语句一条一条的执行。假设现在线程 A要向 a 变量写入 10 这个值,而线程 B 也要向 a 变量写入 20 这个值,我们理想中的执行顺序如图 所示:
按照图所示的流程,确实可以实现线程 A 将 a 变量设置为 10,线程 B 将 a 变量设置为 20。但是实际上的执行流程可能如下图所示:
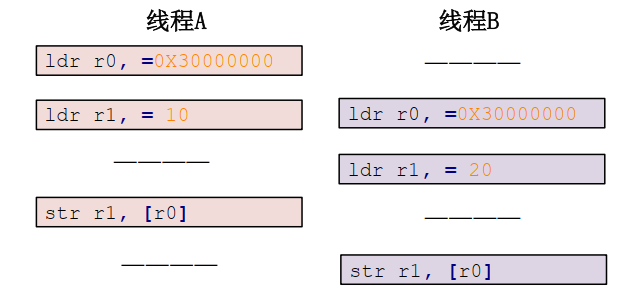
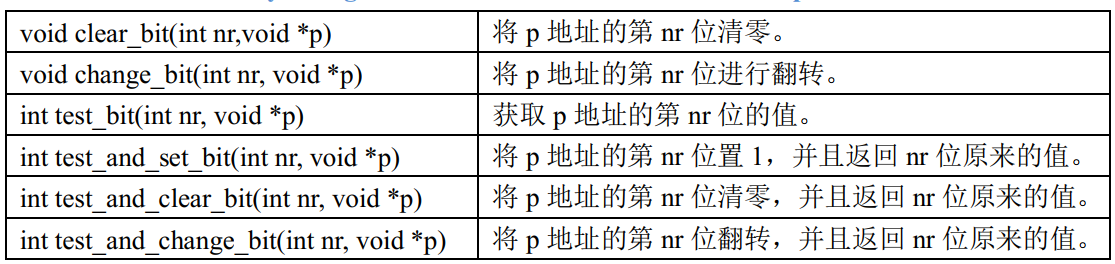
按照图 所示的流程,线程 A 最终将变量 a 设置为了 20,而并不是要求的 10!线程B 没有问题。这就是一个最简单的设置变量值的并发与竞争的例子,要解决这个问题就要保证示例代码 中的三行汇编指令作为一个整体运行,也就是作为一个原子存在。 Linux 内核提供了一组原子操作 API 函数来完成此功能, Linux 内核提供了两组原子操作 API 函数,一组是对整形变量进行操作的,一组是对位进行操作的,我们接下来看一下这些 API 函数。
Linux 内核定义了叫做 atomic_t 的结构体来完成整形数据的原子操作,在使用中用原子变量来代替整形变量,此结构体定义在 include/linux/types.h 文件中,定义如下:
typedef struct {
int counter;
} atomic_t;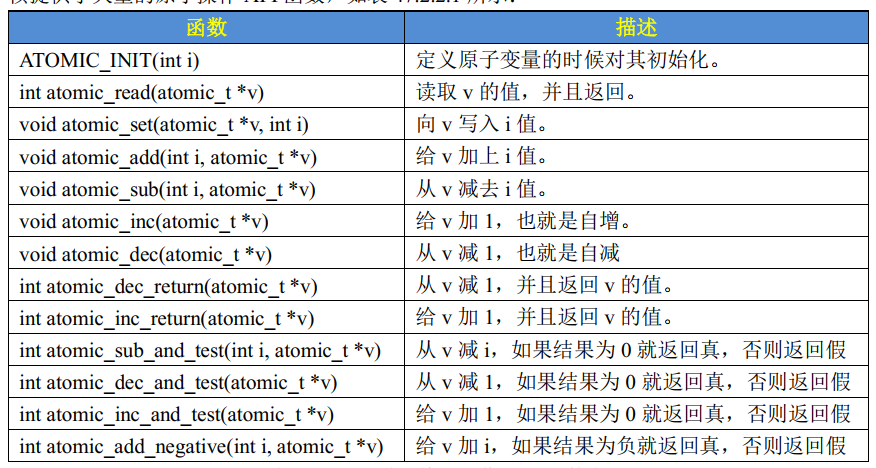

我们这个还是之前的思路,如果不牵扯到硬件操作,那么我们就在ubuntu pc做实验,这样高效,比较方便
driver
#include <linux/types.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/mm.h>
#include <linux/slab.h>
#include <linux/spinlock.h>
#include <linux/module.h>
#include <linux/device.h>
#define CHRDEVBASE_MAJOR 200
uint8_t kernel_buffer[1024] = {0};
static struct class *hello_class;
atomic_t lock;
static int hello_world_open(struct inode * inode, struct file * file)
{
int count;
printk("hello_world_open\r\n");
count = atomic_read(&lock);
printk("count:%d\r\n",count);
if(count)
{
printk("already open ,return fail\r\n");
}
else
atomic_inc(&lock);
return 0;
}
static int hello_world_release (struct inode * inode, struct file * file)
{
printk("hello_world_release\r\n");
atomic_dec(&lock);
return 0;
}
static const struct file_operations hello_world_fops = {
.owner = THIS_MODULE,
.open = hello_world_open,
.release = hello_world_release,
.read = NULL,
.write = NULL,
};
static int __init hello_driver_init(void)
{
int ret;
printk("hello_driver_init\r\n");
atomic_set(&lock,0);
ret = register_chrdev(CHRDEVBASE_MAJOR,"hello_driver",&hello_world_fops);
hello_class = class_create(THIS_MODULE,"hello_class");
device_create(hello_class,NULL,MKDEV(CHRDEVBASE_MAJOR,0),NULL,"hello"); /* /dev/hello */
return 0;
}
static void __exit hello_driver_cleanup(void)
{
printk("hello_driver_cleanup\r\n");
device_destroy(hello_class,MKDEV(CHRDEVBASE_MAJOR,0));
class_destroy(hello_class);
unregister_chrdev(CHRDEVBASE_MAJOR,"hello_driver");
}
module_init(hello_driver_init);
module_exit(hello_driver_cleanup);
MODULE_LICENSE("GPL");
app
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
/* mknod /dev/chrdevbase c 200 0 */
uint8_t buffer[512] = {0};
int main(int argc, char *argv[])
{
int fd;
int ret;
fd = open(argv[1], O_RDWR);
printf("sleep\r\n");
sleep(60);
printf("wake up\r\n");
close(fd);
}Makefile
KERNELDIR := /lib/modules/$(shell uname -r)/build
CURRENT_PATH := $(shell pwd)
obj-m := atomic_driver.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
$(CROSS_COMPILE)gcc -o test_app test_app.c
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
rm -rf test_app参考:
1.【韦东山】嵌入式Linux应用开发完全手册V4.0_韦东山全系列视频文档-IMX6ULL开发板.docx
2.【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.4.pdf
