1. 综述
2. perf 前端
2.1 是什么
2.2 为什么
3. 事件(event)
3.1 是什么
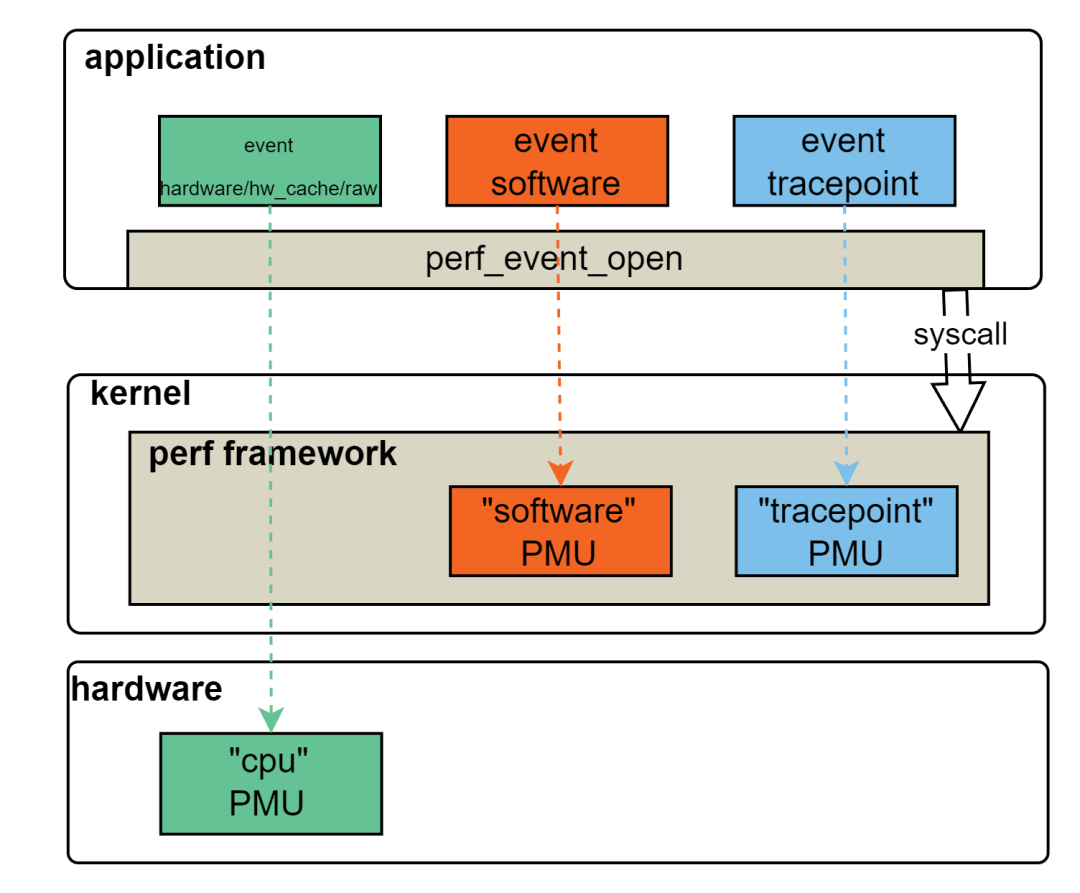
3.2 事件类型
3.2.1 hardware
3.2.2 software
3.2.3 hw_cache
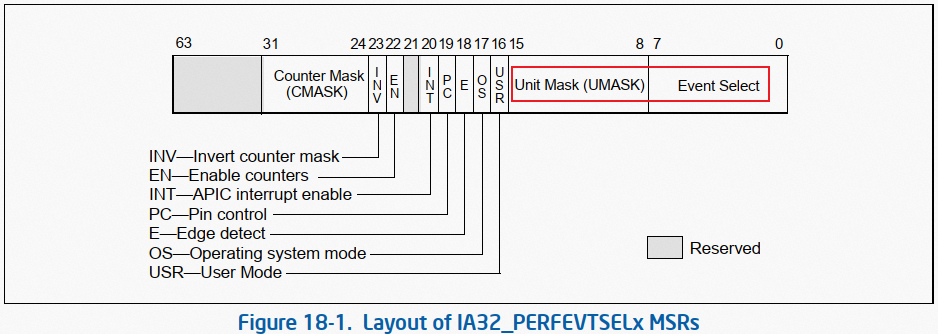
3.2.4 raw
3.2.5 事件类型与 PMU 的关系
3.3 事件监控模式
4. 前端编程基本范式
4.1 基本 counting 模式编程
4.2 事件组读取
4.3 模型总结
5. 总结

/* 用户自己对 syscall 的封装*/long perf_event_open(struct perf_event_attr *hw_event, pid_t pid,int cpu, int group_fd, unsigned long flags) {int ret;ret = syscall(__NR_perf_event_open, hw_event, pid, cpu,group_fd, flags);return ret;}int main(void) {struct perf_event_attr pe;long long count;int fd;/* 这里初始化了一个 attr* 此 attr 是向 perf_event_open 刻画事件属性的关键参数*/memset(&pe, 0, sizeof(struct perf_event_attr));/* type:当前要监控的是一个 hardware 类型事件* 如前文所述,hardware 类型事件,其本质就是 perf 框架提供了抽象事件编码的硬件事件*/pe.type = PERF_TYPE_HARDWARE;pe.size = sizeof(struct perf_event_attr);/* config:指定事件的编码(instruction 事件)*/pe.config = PERF_COUNT_HW_INSTRUCTIONS;/* disable:该事件默认初始是 disabled 模式*/pe.disabled = 1;/* 不监控 kernel(OS)模式下的事件*/pe.exclude_kernel = 1;/* perf_event_open pid 入参是 0* 表明监控当前 task 的 instruction 事件* 一个事件在用户态的呈现,就是一个 fd*/fd = perf_event_open(&pe, 0, -1, -1, 0);/* RESET:复位计数值为 0* ENABLE:enable 此事件(attr 参数中初始此事件是 disabled 的)* 故而需要显式 enable*/ioctl(fd, PERF_EVENT_IOC_RESET, 0);ioctl(fd, PERF_EVENT_IOC_ENABLE, 0);/* 此 printf 的前后对事件进行了 enable、disable* 所以,本程序的 instruction,本质上就是此 printf 语句运行期间的 instruction。*/printf("Measuring instruction count for this printf\n");ioctl(fd, PERF_EVENT_IOC_DISABLE, 0);/* 读出事件的计数值*/read(fd, &count, sizeof(long long));printf("Used %lld instructions\n", count);close(fd);}
struct read_format {u64 nr; /* The number of events */u64 values[2];};int main(void) {struct perf_event_attr pe;struct read_format count;int group_leader_fd, group_member_fd;/* 创建一个 hardware 类型的事件,不赘述*/memset(&pe, 0, sizeof(struct perf_event_attr));pe.type = PERF_TYPE_HARDWARE;pe.size = sizeof(struct perf_event_attr);pe.config = PERF_COUNT_HW_INSTRUCTIONS;pe.disabled = 1;pe.exclude_kernel = 1;/* 这里指定采用 PERF_FORMAT_GROUP 读取方式* 注意,只在 group leader 时需要指定该参数*/pe.read_format = PERF_FORMAT_GROUP;/* 创建 group leader*/group_leader_fd = perf_event_open(&pe, 0, -1, -1, 0);/* 创建一个 raw 类型的事件* 假设要监控的事件编码:umask = 0x00, event_select = 0x3c* 实际上此事件就是 UnHalted Core Cycles(也就是 hardware 类型的 PERF_COUNT_HW_CPU_CYCLES)*/memset(&pe, 0, sizeof(struct perf_event_attr));pe.type = PERF_TYPE_RAW;pe.size = sizeof(struct perf_event_attr);/* 注意 raw 类型事件,config 的编码方式*/pe.config = (0x00 << 4) | 0x3c;pe.disabled = 1;pe.exclude_kernel = 1;/* 创建 group member,perf_event_open 的 group_fd 参数指定为 group_leader_fd*/group_member_fd = perf_event_open(&pe, 0, -1, group_leader_fd, 0);/* 组模式下,只需要操作 group leader 即可*/ioctl(group_leader_fd, PERF_EVENT_IOC_RESET, 0);ioctl(group_leader_fd, PERF_EVENT_IOC_ENABLE, 0);printf("Measuring instruction count for this printf\n");ioctl(group_leader_fd, PERF_EVENT_IOC_DISABLE, 0);/* 读出事件组的计数值,注意这里入参 count 是一个 struct read_format*/read(group_leader_fd, &count, sizeof(count));/* 只有 count.nr 与当前组成员数(包括 leader、member)匹配,才是合法的数据*/if (count.nr == 2)printf("Used %llu instructions, %llu cycles\n", count.values[0], count.values[1]);close(group_leader_fd);close(group_member_fd);}

加【体系结构与性能优化】群,请扫客服小马微信。
