

Boot作为启动术语的来源确实与靴子有关。因为计算机的启动都是从硬件上电开始的,此时软件还没工作,需要一个引导程序把它拉起来。而拉起软件的动作又需要软件自身的启动和运行,这个过程就很像一句英文谚语:
Pull oneself up by one's bootstraps.
意思是通过鞋带把自己提起来,寓意自食其力,靠自己振作起来。由于两者思想如出一辙,计算机发展初期就把启动的引导程序称作BootStrap Loader,或Bootloader或Boot。
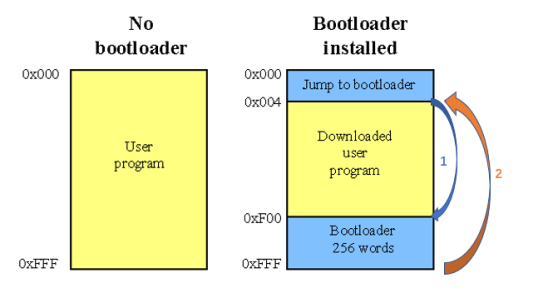 图2:Bootloader示意图
图2:Bootloader示意图
实际上,Flash Bootloader应该算是Bootloader引导后的第二道程序。第一道被引导起来的Bootloader会判断ECU状态,再根据这个状态来拉起应用程序或者进入Flash Bootloader。由于简略表达或者概念模糊,在实际工作场合中很多时候都会听到有人把Bootloader和Flash Bootloader混为一谈。我们可以根据场合保持沟通的连贯性,但心里应该清晰区分两者的区别。

图3:Flash Bootloader与内存关系示意框图
PBL的作用是在应用软件有效时引导它。PBL存储在MCU芯片的Flash,它一般是产品出厂时一次性刷好的,芯片上电或重启后,第一批执行的代码就是PBL。需要刷写软件时,PBL可以通过统一诊断服务(UDS),基于CAN或以太网等底层总线协议与外界诊断仪通信。在校核完诊断仪的权限后,PBL会将诊断仪上的SBL下载到MCU的内存RAM上,然后由SBL进行刷写。SBL包含PBL提供的所有服务以及闪存驱动器(Flash Driver)和一些额外的UDS服务。通过UDS触发,SBL会利用Flash Driver擦除旧软件,并把新软件写到对应的存储区。具体流程如下图4所示:
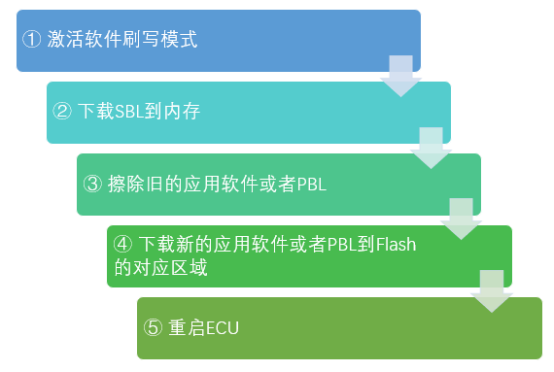
图4:MCU刷写流程示意图
为了避免应用软件被意外误刷写或者删除,PBL中一般不包含Flash Driver,不能直接操作闪存。每次刷写时,包含Flash Driver的SBL都会从诊断仪中重新加载到内存。这种PBL和SBL的分工方案,有这些好处:
1.平时防止应用软件被误刷写。
3.通过SBL还能反向刷写更新PBL,提高了Bootloader的整体灵活度。
上面说的Flash Bootloader是针对传统高度嵌入式系统的。但相信各位汽车同仁也感受到,越来越多的高性能计算芯片正在汽车上普及,汽车中央电脑等方案也是不绝于耳。对于这些高性能计算芯片,行业内常以SoC(System on Chip)相称。SoC的启动和刷写方案和MCU如出一辙,但由于其内部存储管理系统和内部总线更加复杂,启动的具体实现与MCU略有差异,其细节更接近于我们熟悉的个人电脑。总体的启动流程如下图所示。
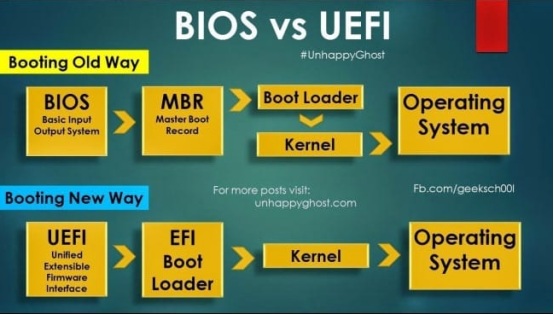
图5:BIOS和UEFI启动流程示意图
传统计算机的启动一般采用上图上部分的BIOS启动。BISO是Basic Input Output System的缩写,是计算机硬件与软件第一次相遇的地方。BIOS的代码通常被嵌入到电脑的主板的EEPROM中。BIOS可以完成计算机上电后的基本自检,并指示计算机如何执行基本功能,如启动和键盘控制。在BIOS中也可以选择配置启动参数。对,这就是我们以前重装电脑系统时,在BIOS里可以选择从光盘还是硬盘启动等操作的原因。然后BIOS会调用硬盘起始位置的MBR(Master Boot Record),然后按照其中的分区表拉起Bootloader,然后是操作系统内核,再到操作系统和应用。
当然BIOS的设计已经有年头了。现在生产的电脑基本都是使用UEFI(Unified Extensible Firmware Interface),汽车上的高性能计算单元也一样。从实现功能上来看,UEFI可以认为是升级版的BIOS。
UEFI是一个微型操作系统,它在内存中加载Bootloader,再执行额外的操作程序。作为微型操作系统,UEFI运行在固件之上,可以支持的功能比BIOS多得多,包括系统验证等安全功能。其中最核心的区别是,UEFI支持更大的寻址空间,并且可以在32位或64位模式下运行(BIOS只支持16位),也就是UEFI可以支持更大的硬盘或者网络共享,并且启动速度更快。
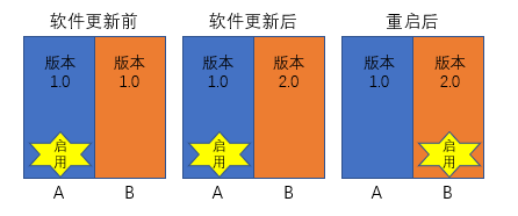
图6:A/B分区升级示意图
新年伊始,万象更新。每年的开始阶段对这一整年的影响都举足轻重。对车载控制器的启动来说也是类似,好的开始是成功的一半。正是由于启动的重要性,也有不少挑战要通过启动过程来解决。其中最突出的就是关于信息安全和启动时间的挑战。

图7:一种MCU和SoC安全启动方案的示意图
车载业务对于启动时间又非常敏感。例如当下大家都习惯的倒车影像,我们通常坐上车、系好安全带、发动车辆挂倒挡,就希望影像能够出现在中控屏。试想如果整个启动时长需要1分钟,那我们就需要在车上等待几十秒,或者脱离辅助功能“盲开”出去了,这样的用户体验会很差。
为了迎接这个挑战,车载域控制器或计算平台经常会引入休眠模式。这也类似我们电脑的休眠模式,就是让原本掉电丢失的内存上的内容先存储到硬盘里,下次启动时再将所有内容重新加载到内存上,而不是采用重新从UEFI加载Bootloader到内核再初始化的那一套流程。这样控制器技能长时间保持低功耗,又能在需要唤醒时能够快速启动工作。当然,这需要耗费硬盘上的额外空间来存储休眠时的内存数据。以下图Windows 8的示意图为例,传统冷启动需要耗费大量的时间来初始化系统,但是从休眠模式中启动时,只需把硬盘中的休眠数据(Hiberfile)加载到内存,就可以开始用户登录了。
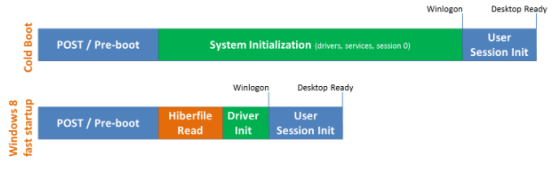
图8:Windows 8冷启动和从休眠中的启动时长对比示意图
而除了休眠模式,控制器还可以通过优化安全启动策略缩短启动时长。有些情况下,可以允许控制器先拉起Bootloader,操作系统和应用,并记录其启动的签名、指纹等关键数据。待系统工作后,TEE会在后台再次校验已经启动的系统是否合法,如果非法则进入相应的安全模式。这种做法比先验证再启动的方案会损失安全性,但是能缩短启动时长。基于整车网络安全架构的分析,可以让部分较为安全的控制器(例如不与外网直接通讯的本地控制器)采用这种策略。
当然,产品的发展都是多维度而不是单一维度的。车载控制器的启动过程也应该按照多维度标准去取舍和开发。这就像当年传统非智能手机的启动时间是很快,也很安全,没有那么多病毒。但还是被现在启动时间更长、安全风险更大的智能手机所取代了。春节期间大家在家看的智能电视也是一个道理。在汽车智能化的大趋势下,启动过程相信也会不断平衡,做得更加智能、高效、安全。
参考来源:
1.https://buildstorm.com/blog/automotive-bootloader-fbl/
2.https://www.embitel.com/blog/embedded-blog/what-is-flash-bootloader-and-nuances-of-an-automotive-ecu-re-programming
3.https://baike.baidu.com/item/Bootloader/8733520
4.http://www.oz1bxm.dk/PIC/bootloader.htm
5.https://www.timesys.com/security/secure-boot-snapdragon-410/
车身控制器功能规范
小鹏P7的热管理系统详解
大众ID4.X内部ECU技术细节整理
比亚迪海豹整车技术整理
揭秘理想的整车电子电气架构
国内主机整车EEA架构汇总
谈谈Bootloader自更新
谈谈对两家AUTOSAR工具看法
奥迪首款800V车型技术总览
汽车软件需求是如何变成用户功能?
汽车E/E架构的网络安全分析
电子电气架构设计需要考虑哪些方面?
分享不易,恳请点个【👍】和【在看】
