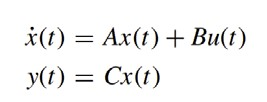
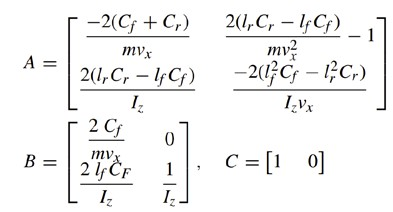
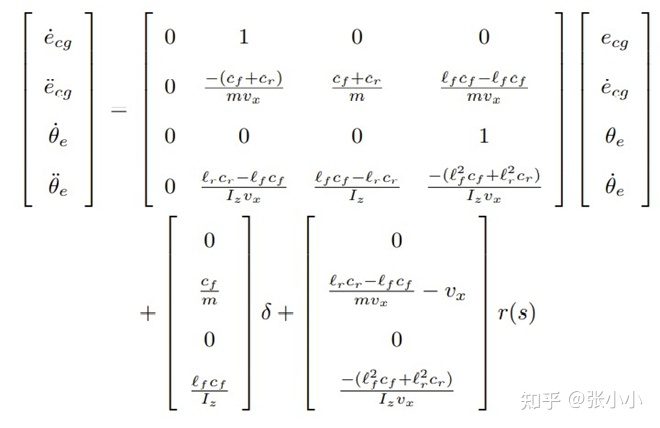
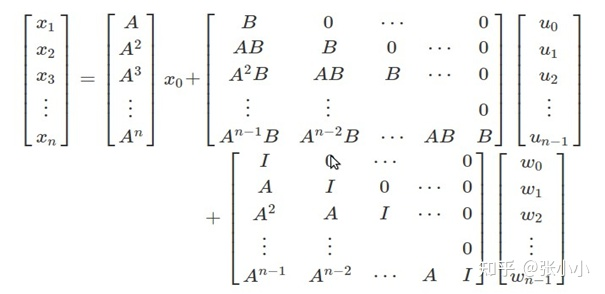
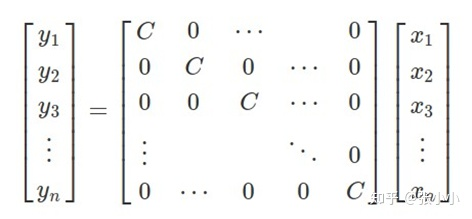
线性二次调节器(Linear Quadratic Regulator或LQR)是基于模型的控制器,它使用车辆的状态来使误差最小化。LQR理论是现代控制理论中发展最早也最为成熟的一种状态空间设计法。LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。LQR 最优设计是指设计出的状态反馈控制器 K 要使二次型目标函数 J 取最小值,而 K 由权矩阵 Q 与 R 唯一决定,故此 Q、R的选择尤为重要。如下公式为LQR代价函数:根据车辆动力学模型和LQR代价函数可以推到出代数里卡提方程:最终通过迭代黎卡提方程计算反馈矩阵,再根据反馈矩阵获取最优控制量。
Snider J M. Automatic steering methods for autonomous automobile path tracking[J]. Robotics Institute, Pittsburgh, PA, Tech. Rep. CMU-RITR-09-08,2009.
Rajamani R. Vehicle dynamics and control[M]. Springer Science & Business Media, 2011.
Minseong, Chae, Youngjin, et al. Dynamic Handling Characteristics Control of an in-Wheel-Motor Driven Electric Vehicle Based on Multiple Sliding Mode Control Approach[J]. IEEE Access, 2019, 7:132448-132458.