

我在很久以前写过一个几乎重合的帖子,但是我觉得当时的我太年轻了,很多东西没有写明白,而一年后我决定重新搞一下这个东西。
FlySky+A8S(SBUS接收机)+ESP8266控制大疆Tello无人机.准备

红红火火的DJI官网
怎么说呢,EDU版本有个ESP32的扩展模块,现在下载的SDK文档里面没有这部分内容了。
我不妨大胆的想想这个问题,DJI确实是做出来了牛逼的东西,但是面向用户的话,用户不太行,玩不转。(本身产品也是毛病星星点点的,有些也不能克服)
最后DJI索性,玩尼玛,桌子都给你掀了:

乌鸦哥真帅啊
。。。我土狗了,原来在后面有这部分内容,上面是我辛苦写的,就不删除了

搞错了
害,有个教育群是有些人希望推出教育产品的无刷版本,对的,现在TT的最大问题就是续航和动力问题,其它的都很棒。
害,无所谓啦~想以前我还差点变成大疆的KOL,妈的,我自己不争气,不搞视频,写文章谁看啊!(鄙人技术垃圾也是个问题,hhhhh,都可以补足了)
对的,机会就悄悄的溜走了
DJI的无人机,除了手机应用以外,还有一个是蓝牙的手柄,害,我也买了,用不明白了。。。
所以最大的问题就是作为一个小航模,没有一个航模遥控器来控制。
TT在拆下扩展模块的时候,使用的WIFI链路+UDP控制,在加扩展模块下,控制的样子和上面大同小异,不过是扩展和飞机之间通讯是串口:
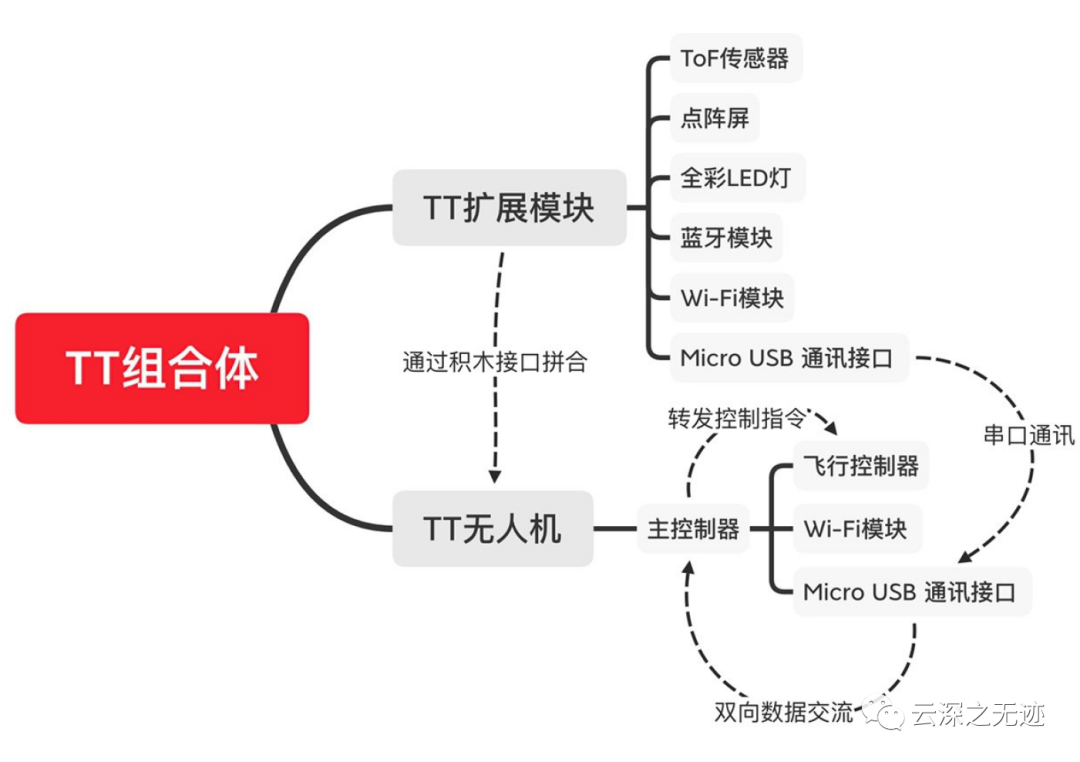
官方有张图,很漂亮
那这个项目就是使用普通RC接收机+遥控器来完成TT。
其实实现起来很简单,就两个代码而已,但是我觉得没有意思。要搞明白写咋写出来的。
你要问我为什么不自己写,那抱歉,我是个菜狗
FlySky的接收机要用一个串口,ESP8266的控制需要用一个串口,必须要用的两个串口,但是通讯程序需要调试,所以还需要一个串口,iBUS还支持信息遥测,所以还可以用一个串口。
而且还要ESP8266要网络支持,所以可以找到这一款硬件,串口+ESP8266的合体。
网上可以买到的就是这个了,但有点贵。。。
其实就单纯的控制来讲,其实一个ESP8266+RC就可以了~
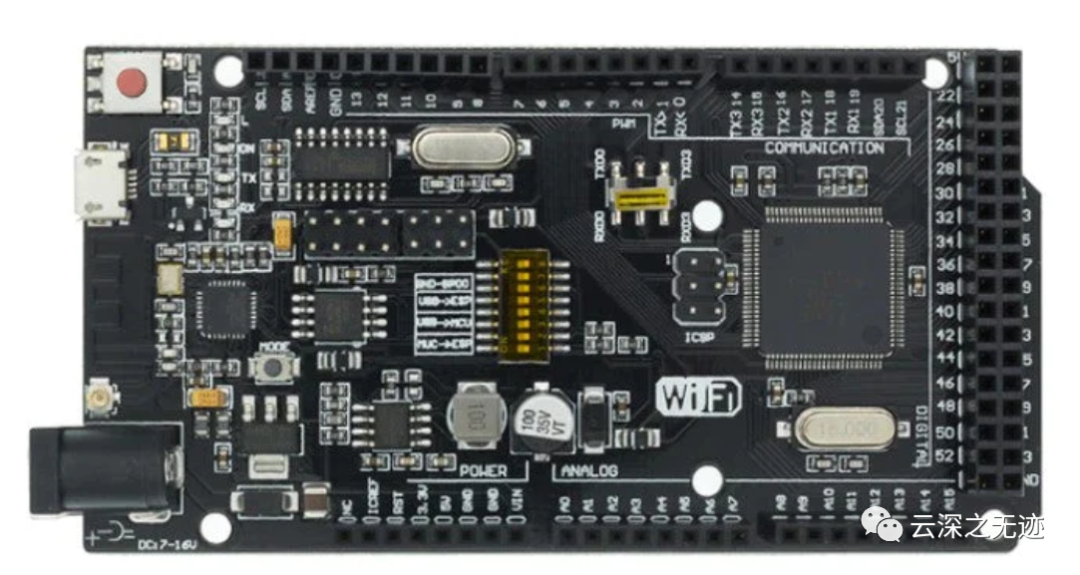
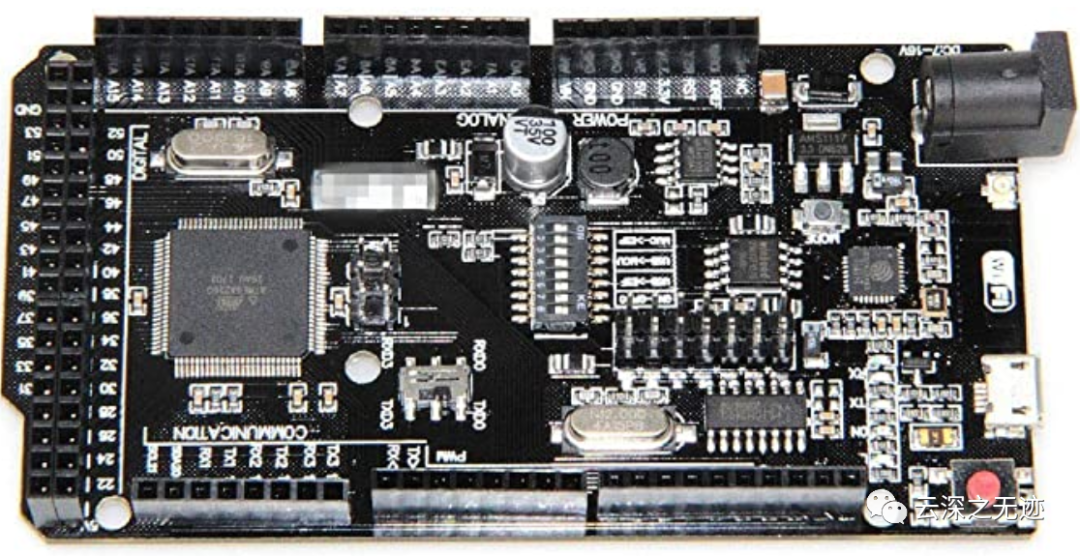
WeMOS Mega
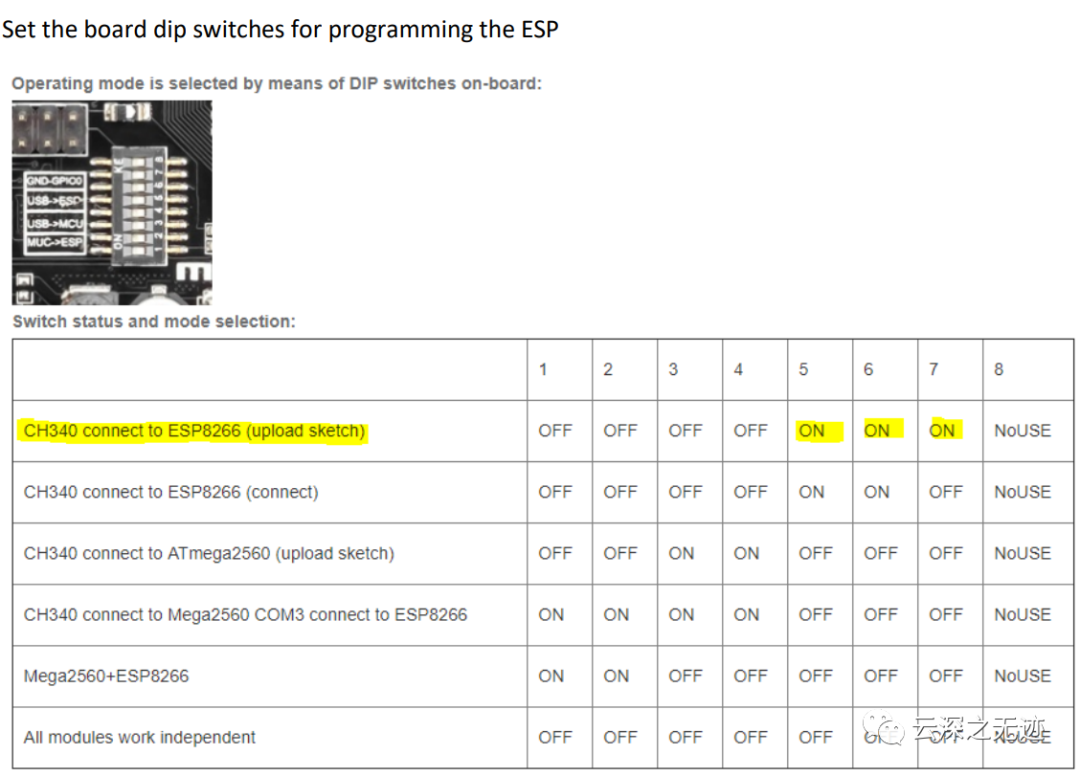
而且上面通过拨码开关,来开启各个芯片之间的连接
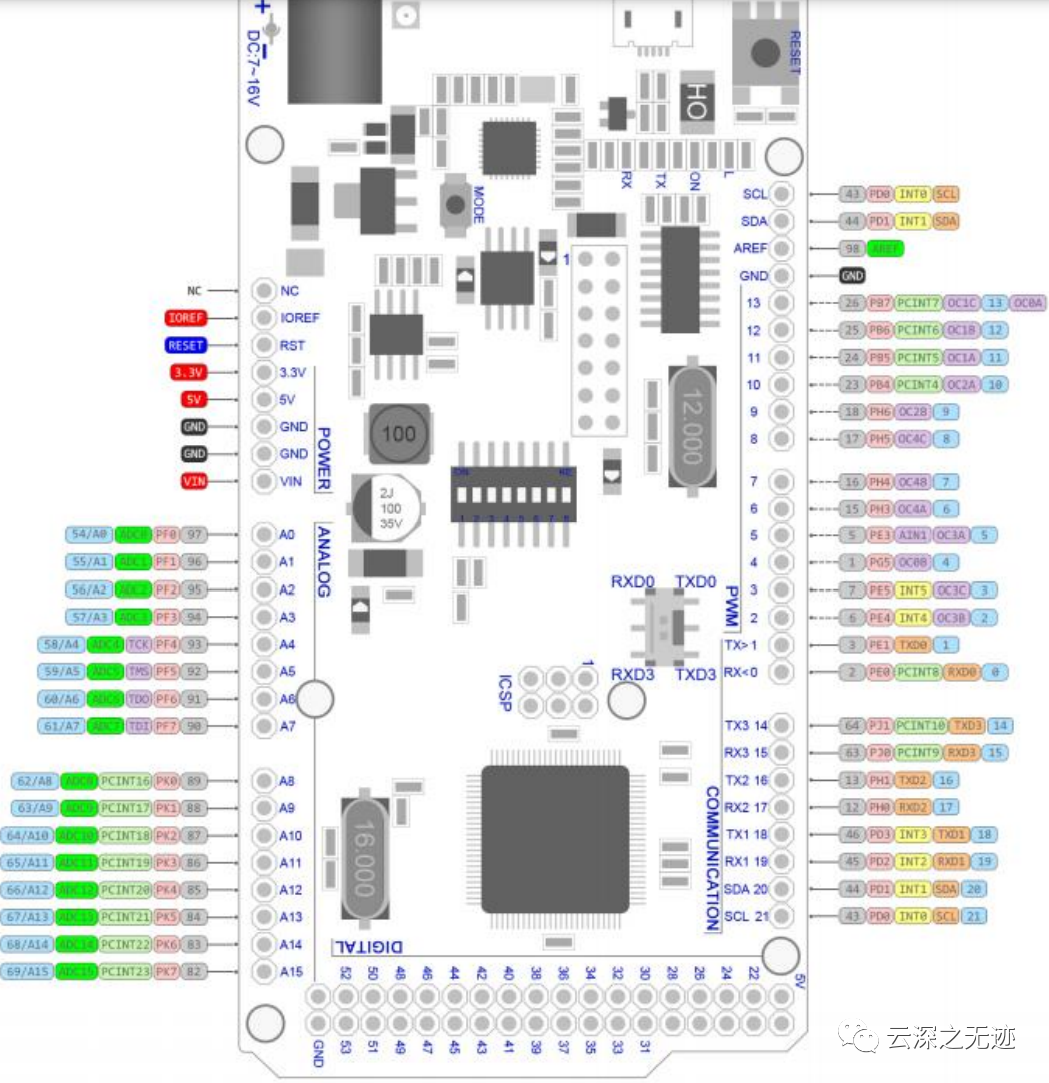
如果有板子的,我也给出Pin图
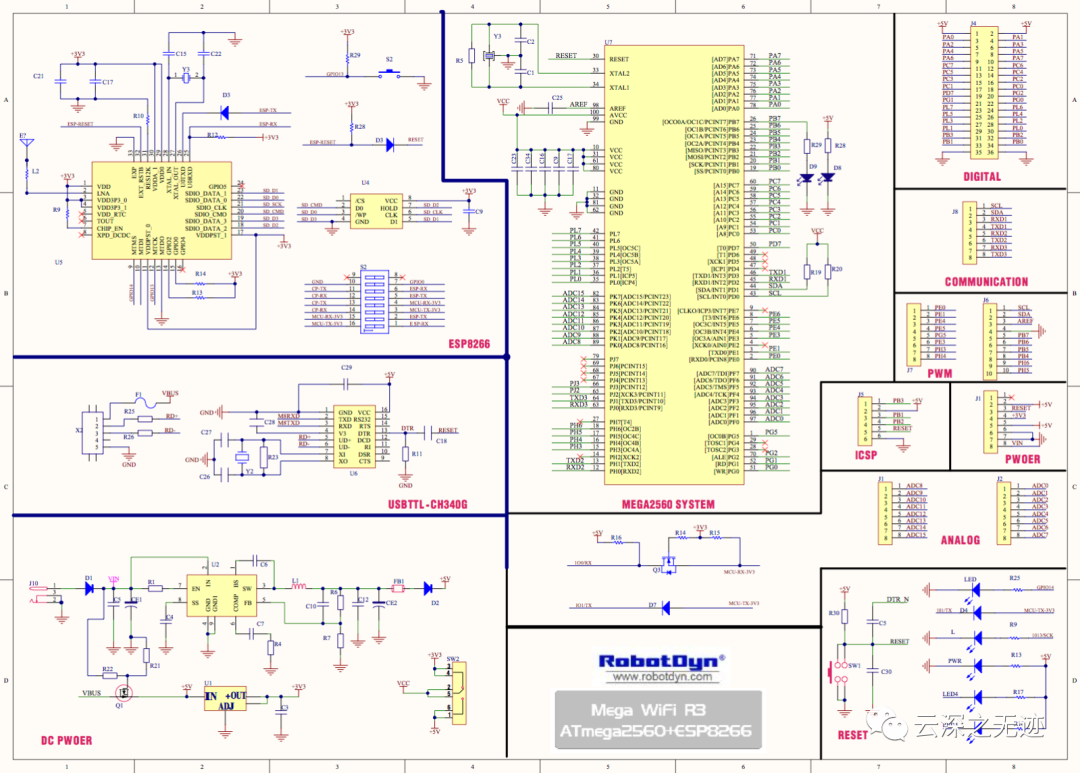
那有人想要原理图,我也有,牛逼不?从俄罗斯搞得~

还不夸我


ESP8266有两个串口
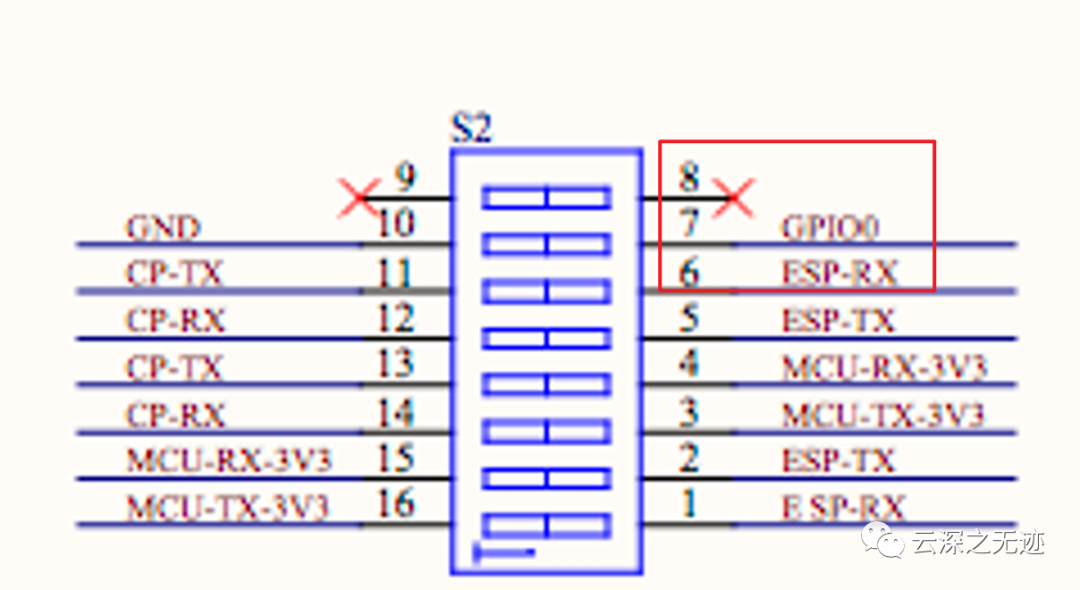
这个是编码开关的连接方式
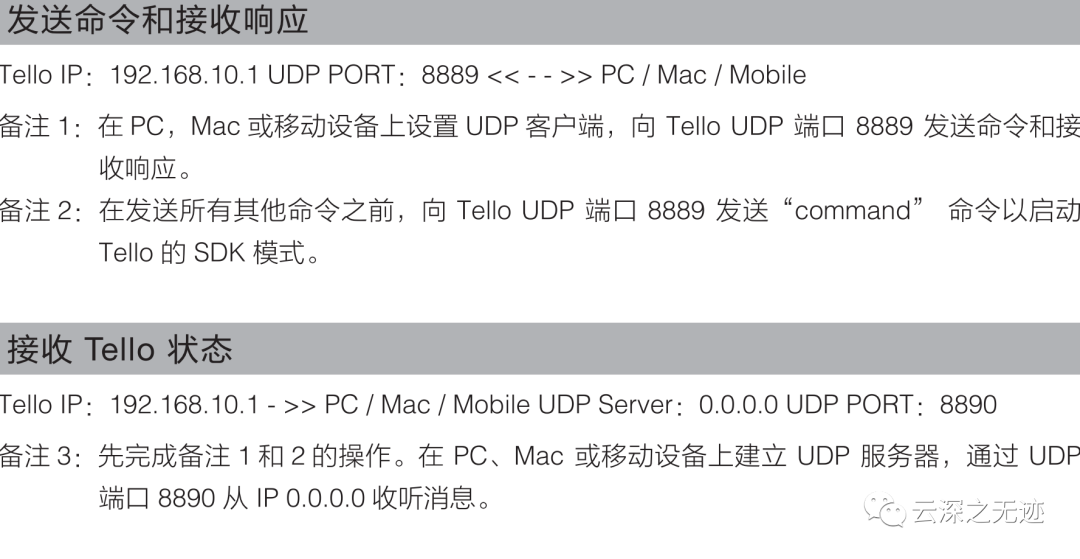
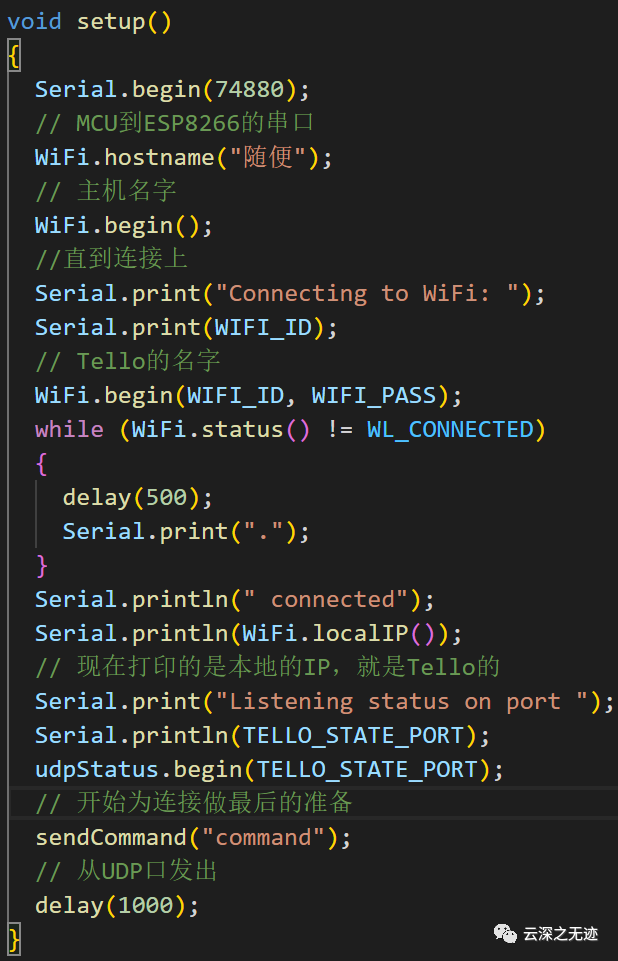
Tello 公开了一个接收命令的 UDP 端口和另一个公开统计信息的端口。ESP8266 模块会先连接到 Tello 建立的WIFI,并发送command消息以稳定通信。
一个通道(遥控器通道)用作起飞和降落的开关。起飞后,使用rc指令连续控制无人机,同时发送所有 4 个通道(左/右、前/后、上/下和偏航)。
这些在源码中都会有体现。
ATmega2560 和 ESP8266 模块之间的通信是通过其中一个串行端口进行的。我选择使用基于文本的通信,只是为了更容易在两个模块之间来回发送数据和调试消息。
这就是我们的控制方式了


我们就要这些说明,不要挑战卡
我是没有接触过网络编程的,这个需要补一个UDP编程。
https://arduino-esp8266.readthedocs.io/en/latest/esp8266wifi/udp-examples.html这里推荐自带的教程
创建一个WiFiUDP对象。然后指定一个端口来监听传入的数据包。最后,我们需要为传入的数据包设置缓冲区并定义回复消息。
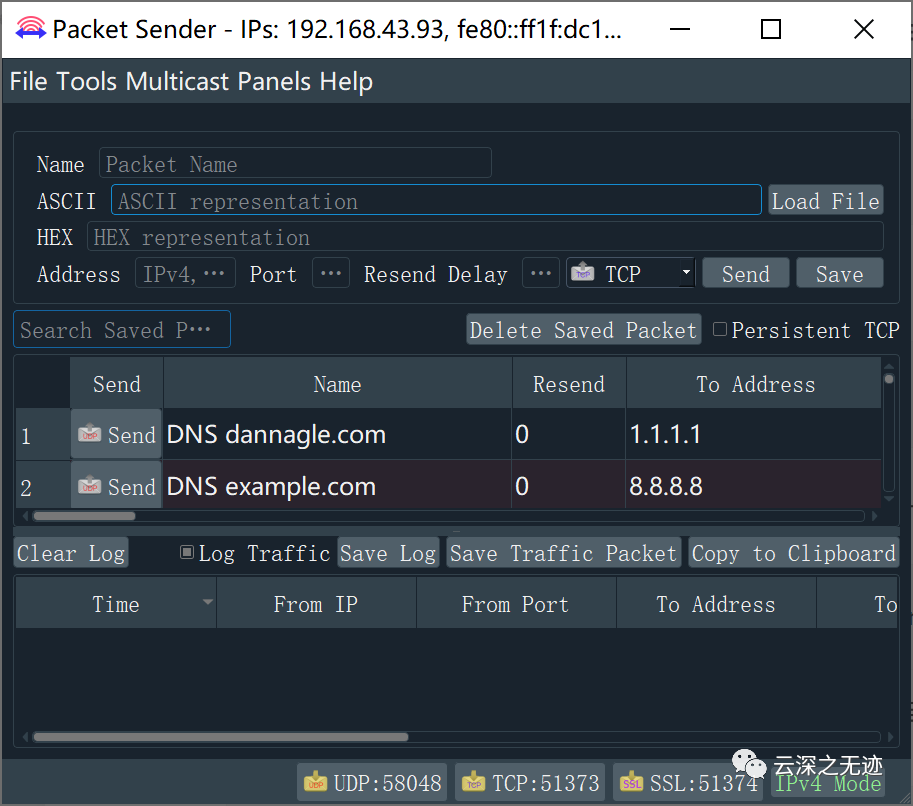
推荐这个开源的调试软件
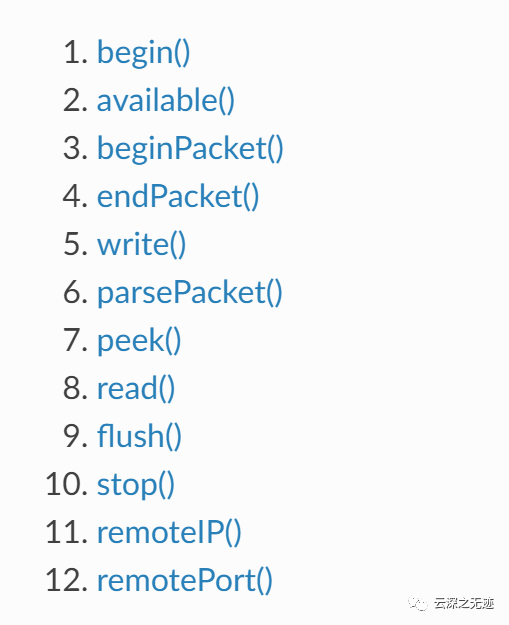
8266中,UDP只有12个函数
函数用法在这里:
uint8_t begin(uint16_t p)uint8_t begin(IPAddress a, uint16_t p)
启动监听某个端口,或者来自某地址发送给某端口的数据;
void stop()停止监听,释放资源;
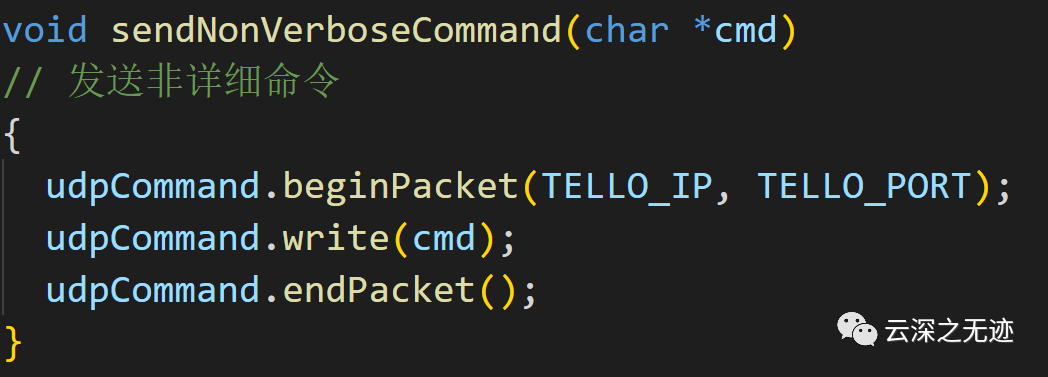
int beginPacket()准备发送数据包(仅在运行parsePacket()方法且返回值大于0时可用);
int beginPacket(IPAddress ip, uint16_t port)准备发送数据包,参数分别为目标IP和目标端口号;
size_t write(uint8_t)size_t write(const uint8_t *buffer, size_t size)
复制数据到发送缓存(同一数据包发送缓存最大1460字节);
int endPacket()发送数据;
int parsePacket()获取接收数据信息,如果有数据包可用,则返回队首数据包长度,否则返回0;
int read()读取首字节数据(仅在运行parsePacket()方法且返回值大于0时可用);
int read(unsigned char* buffer, size_t len)int read(char* buffer, size_t len)
读取数据(仅在运行parsePacket()方法且返回值大于0时可用);
int peek()读取首字节数据,但并不从接收缓存中删除它(仅在运行parsePacket()方法且返回值大于0时可用);
void flush()清空当前接收缓存(仅在运行parsePacket()方法且返回值大于0时可用);
IPAddress remoteIP()返回远端地址(仅在运行parsePacket()方法且返回值大于0时可用);
uint16_t remotePort()返回远端端口号(仅在运行parsePacket()方法且返回值大于0时可用);
因为频繁的使用到串口,这里也说一下串口的使用,ESP8266的串口可以使用特殊优化过的库:
https://github.com/plerup/espsoftwareserial如果你的硬件串口不够用的话,可以考虑使用IO来模拟UART:
传统的SoftwareSerial 库具有以下已知限制:
http://arduiniana.org/NewSoftSerial/NewSoftSerial12.zip这个是库的直接下载位置,可以去读源码
具体的API就不罗列了:
https://blog.csdn.net/poisonchry/article/details/116503393这篇写的很好了
我们这里还缺一个RC的知识铺垫:

TR的遥控器还挺丑的
官网上面早就没有了AFHDS2的协议内容,不过互联网是有记忆的:
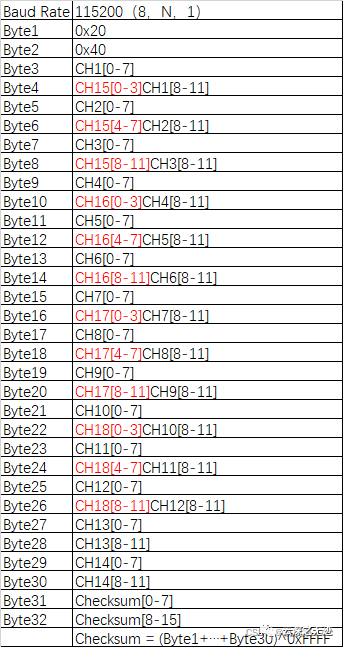
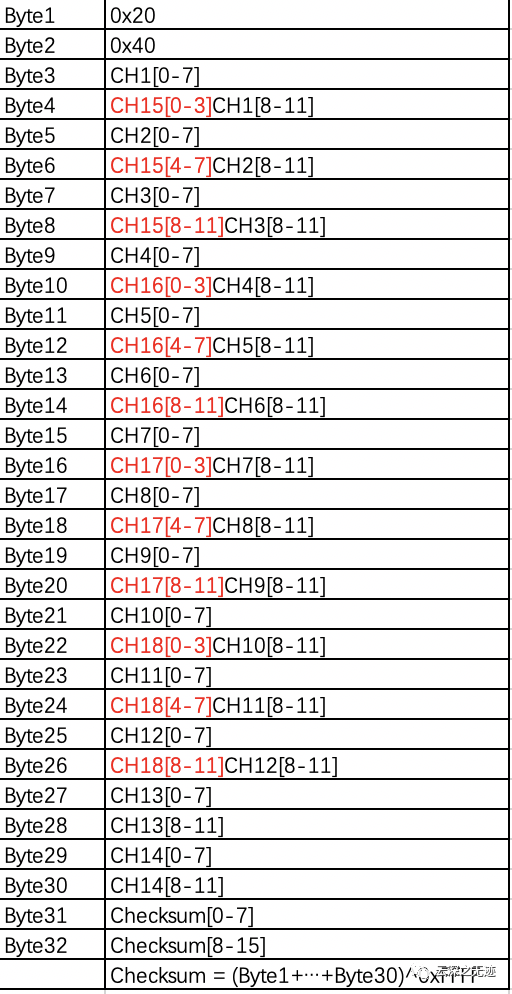
这个是2代的协议
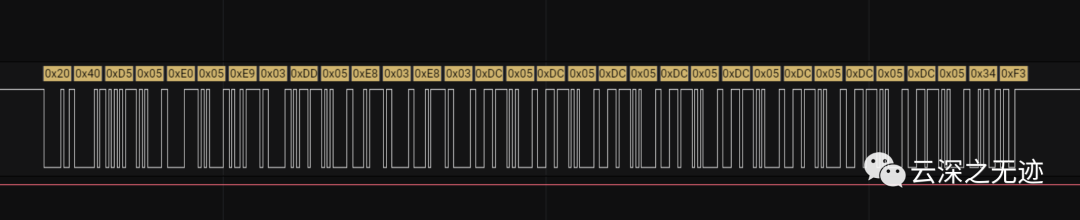
逻辑分析仪的数据
AFHDS 一代协议(FlySky),至于一代的协议在这里。
可以读一下
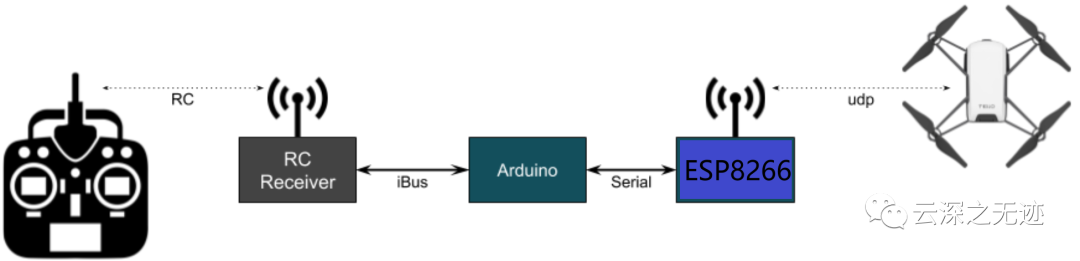
整个通讯链路的话就是这样
我们需要两份代码,一份处理RC,一份负责遥测以及将RC通道的信息解码到UDP使用WIFI发射出去。
我们先看RC部分:
https://github.com/bmellink/IBusBM使用这个库来解码
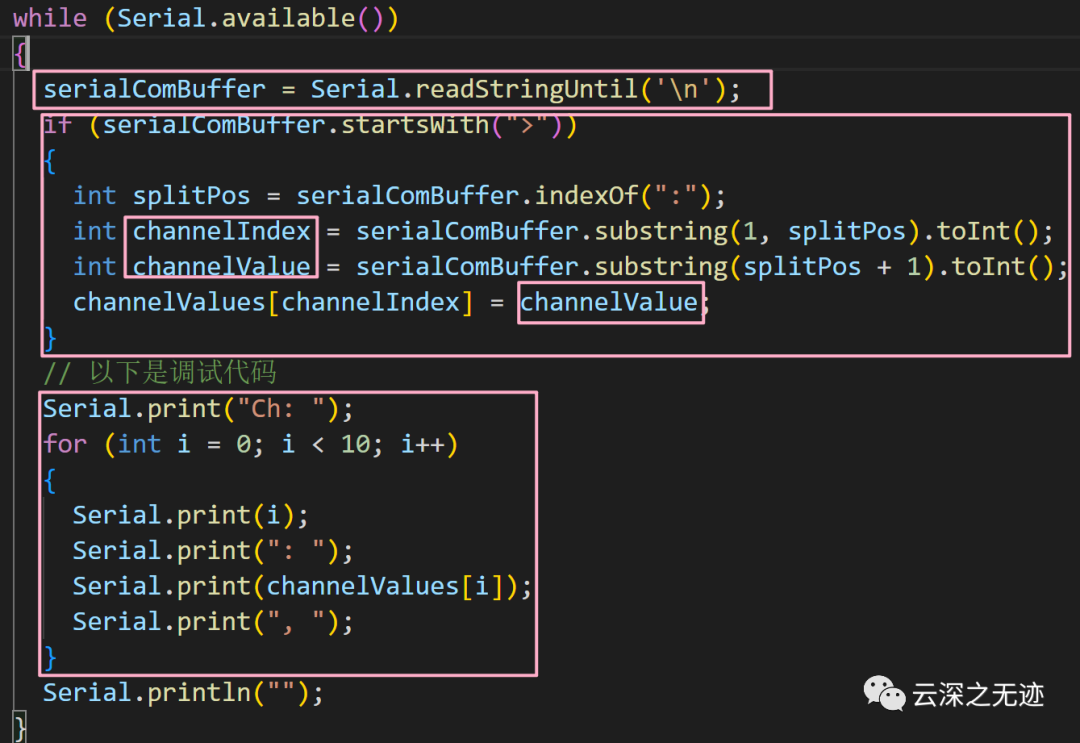
该代码用于与 RC 接收器通信,并将数据从通道数据发送到 ESP8266。它不断地从接收器读取 RC 通道;然后将其序列化为具有格式的字符串:
channelNumber:value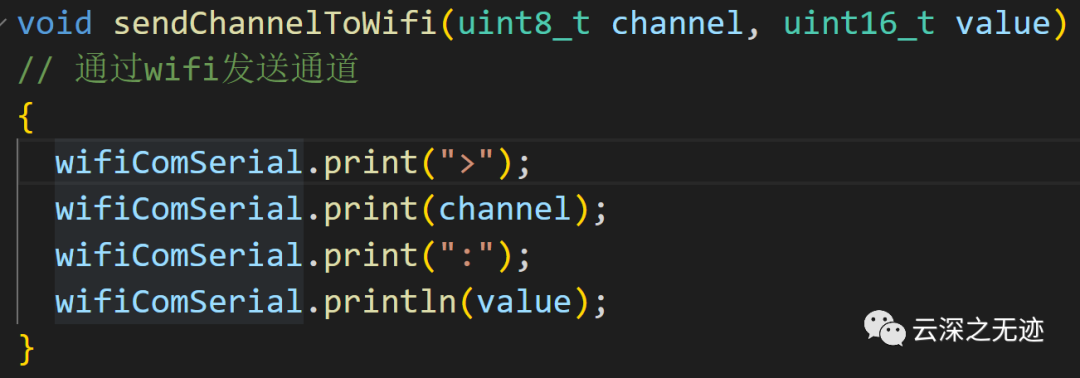
这个是序列化的代码
最后通过ESP8266串口发送。它还从串口读取消息。它们可以是调试或数据消息。两种类型的数据消息是电池电量和温度水平。它们都作为遥测传感器发送回 RC 接收器。
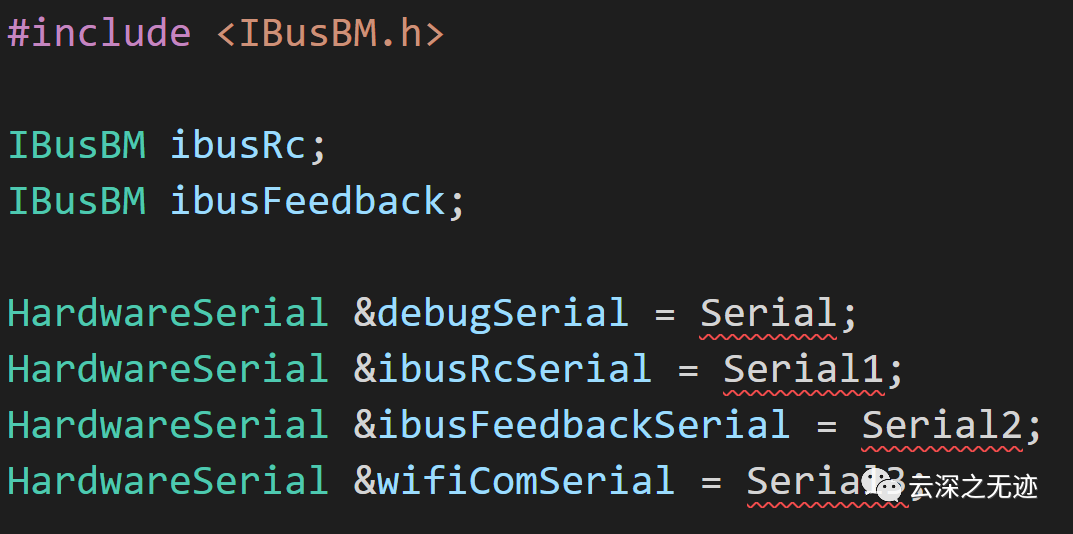
我们建立RC和信息遥测两个对象,以及使用了Mega的4个串口
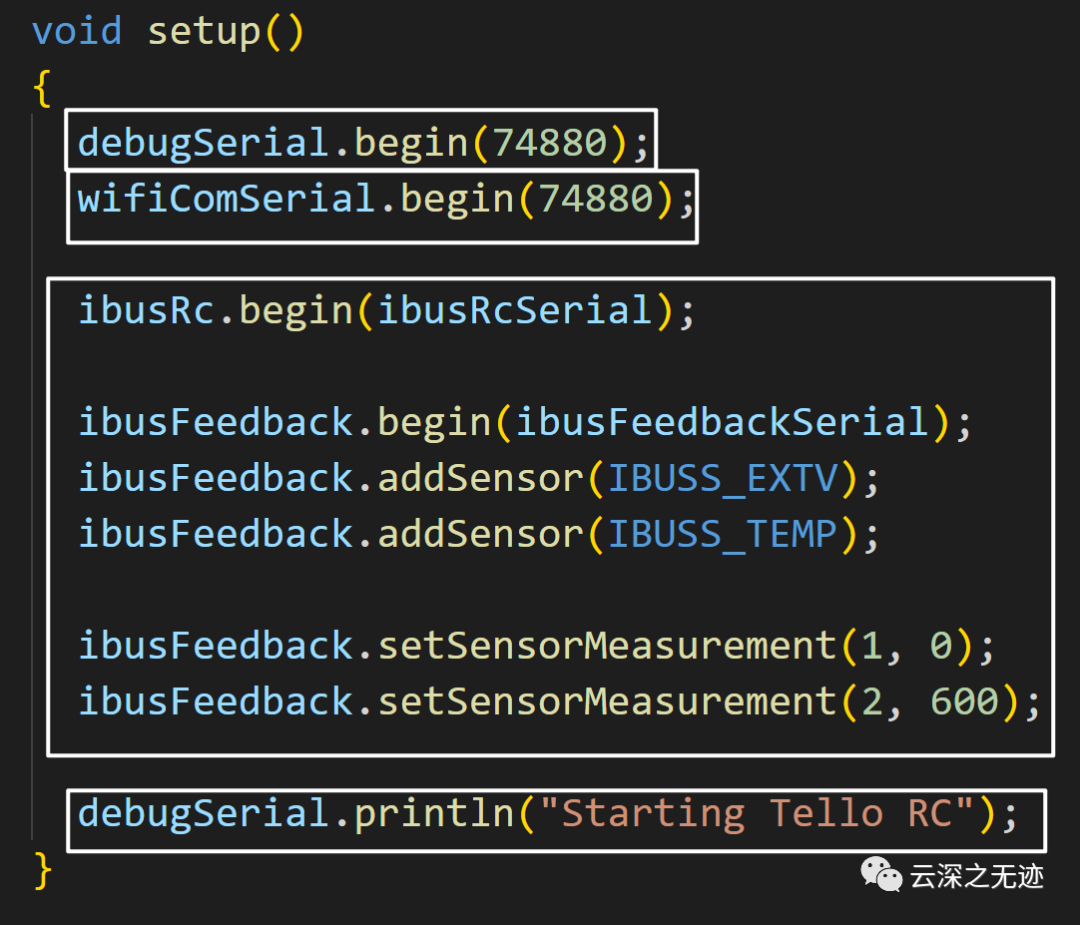
就打印信息,可以波特率不高,信息回调也打开了
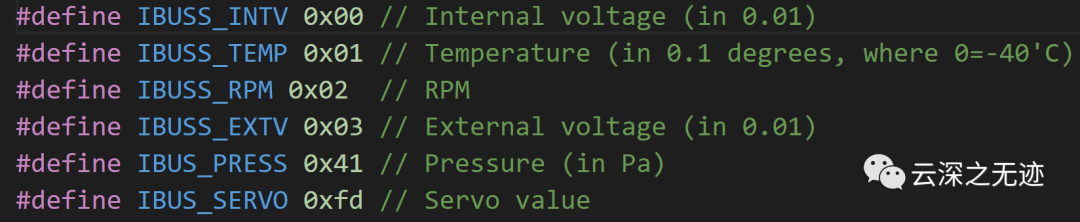
可以遥测的数据
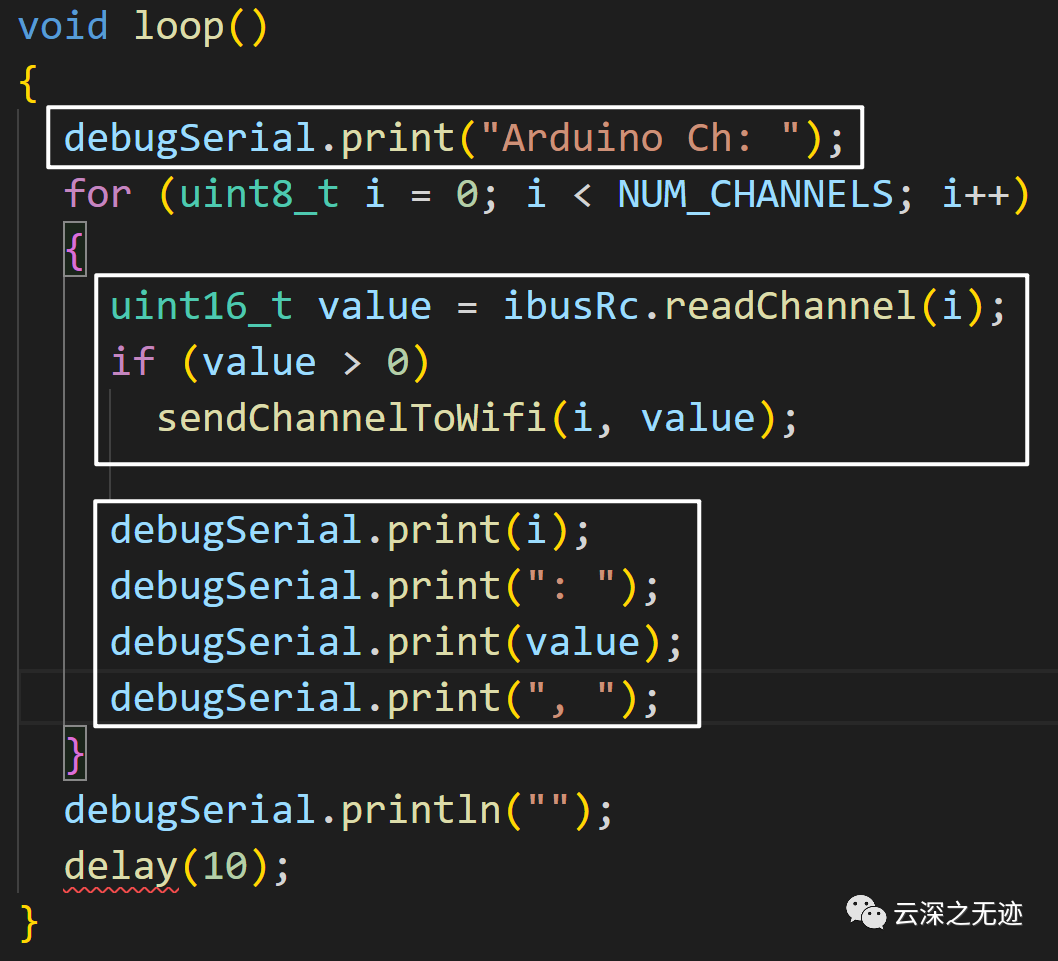
在前面调试的时候开一个串口,将解码出来的数据打印出去,获得的是第几个通道的值是多少。
SerialEvent()函数。函数将在loop()中自动被内部调用。在我们写的代码中如果串口有任何数据(只要不是换行符),那么就将数据加到一个缓存字符串中。在收到换行符时就返回缓存字符串。发送后将会将字符串清空为null。
这个有点回调的感觉,但是又感觉不是:
三串口是信息回调串口:然后一直读到换行,如果里面有
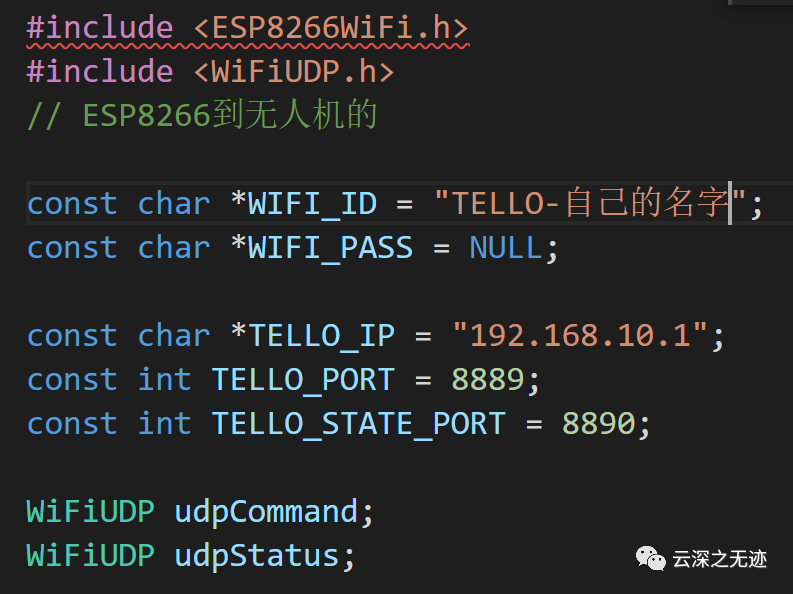
硬件的连接,和IP+控制端口+信息端口
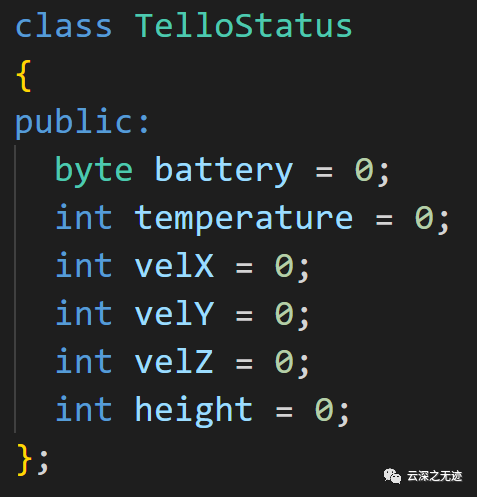
打印的信息用类来包装
应该写的够详细了吧
连接WIFI到Tello,并且发送控制命令。
模块有三种模式:
1:STA 模式:ESP8266模块通过路由器连接互联网,手机或电脑通过互联网实现对设备的远程控制。
2:AP 模式:ESP8266模块作为热点,实现手机或电脑直接与模块通信,实现局域网无线控制。
3:STA+AP 模式:两种模式的共存模式,即可以通过互联网控制可实现无缝切换,方便操作。
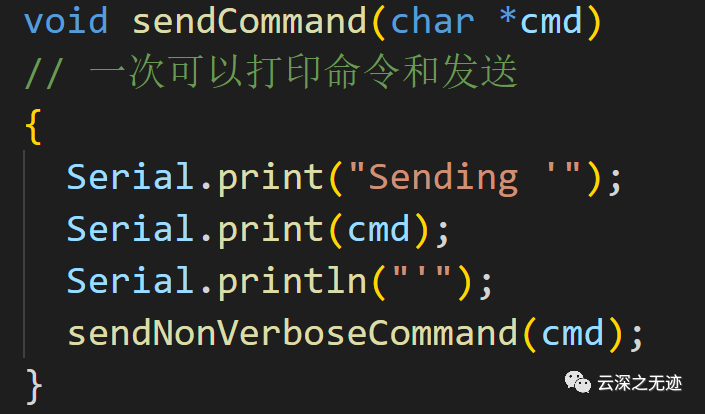
发送的命令的时候随便打印在终端上面
和Tello的通讯

SDK3.0

SDK2.0
这个代码来处理这个字符串
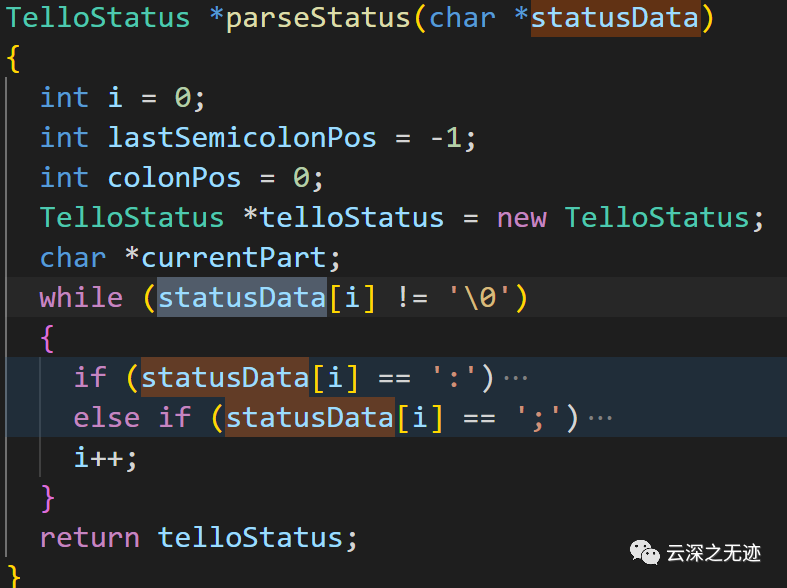
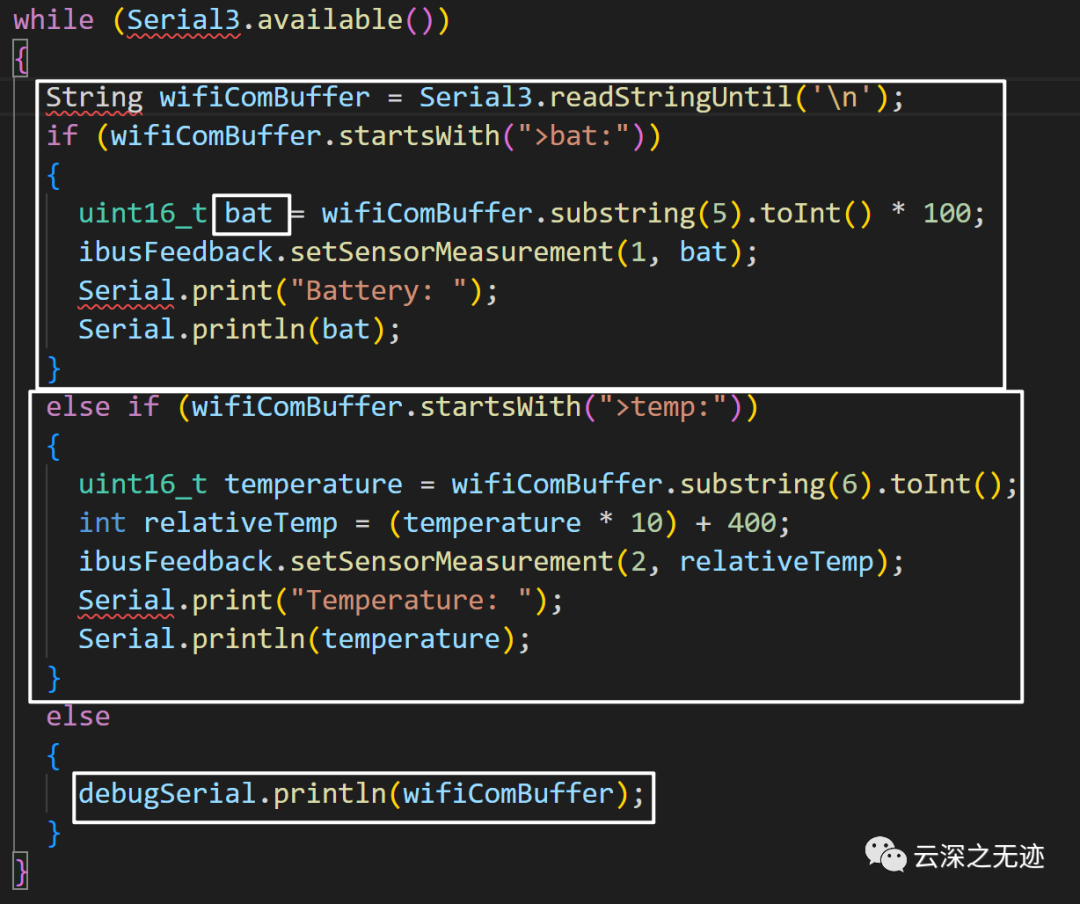
这个从UDP 端口 8890 读取统计数据。这些统计数据被序列化为一个字符串,其中包含几个不同的键和值,由“;”分隔。此代码解析此字符串,并选择电池和温度。它从串行接口读取 RC 通道并将统计数据写回。
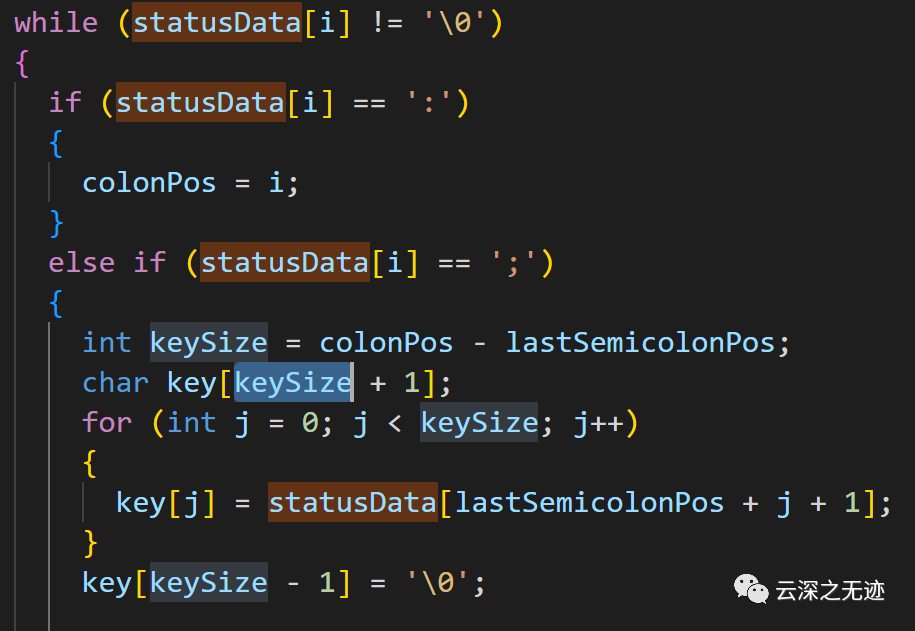
这个是自编码的,在从缓冲区取到的字符串插入:/0,末尾有EOF的时候停止,开始插入,不停的插入:;,来分割字符串。
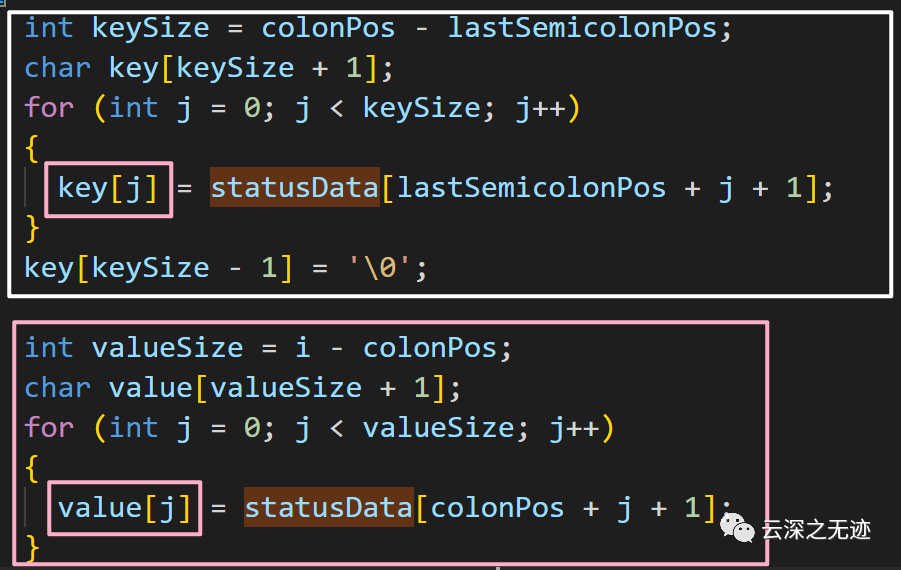
其实就是键值对拆分,妈的,写Python久了看着这东西还有点害怕
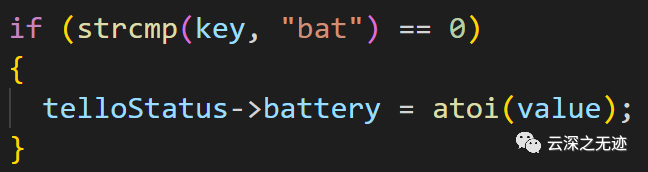
最后把解码的值装载到Tello的状态类里面
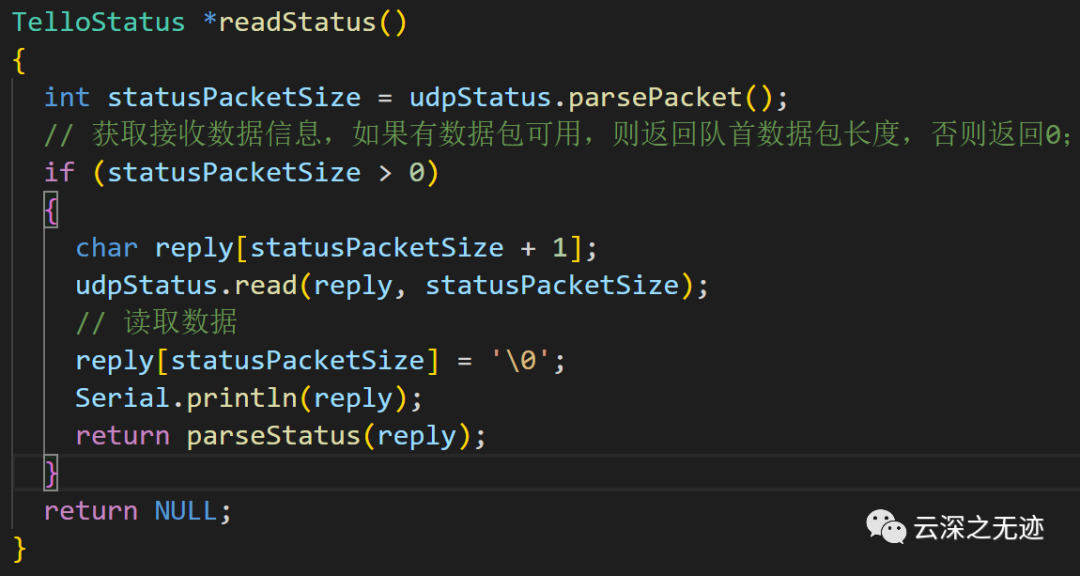
这个代码是从UDP口取到信息,和上面的代码运行的时候有顺序区别
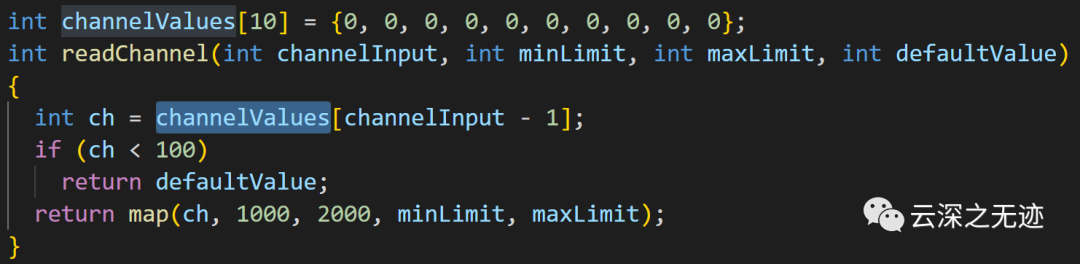
上面的数组,就是为了确定状态,这个是工具函数,来处理摇杆的数据
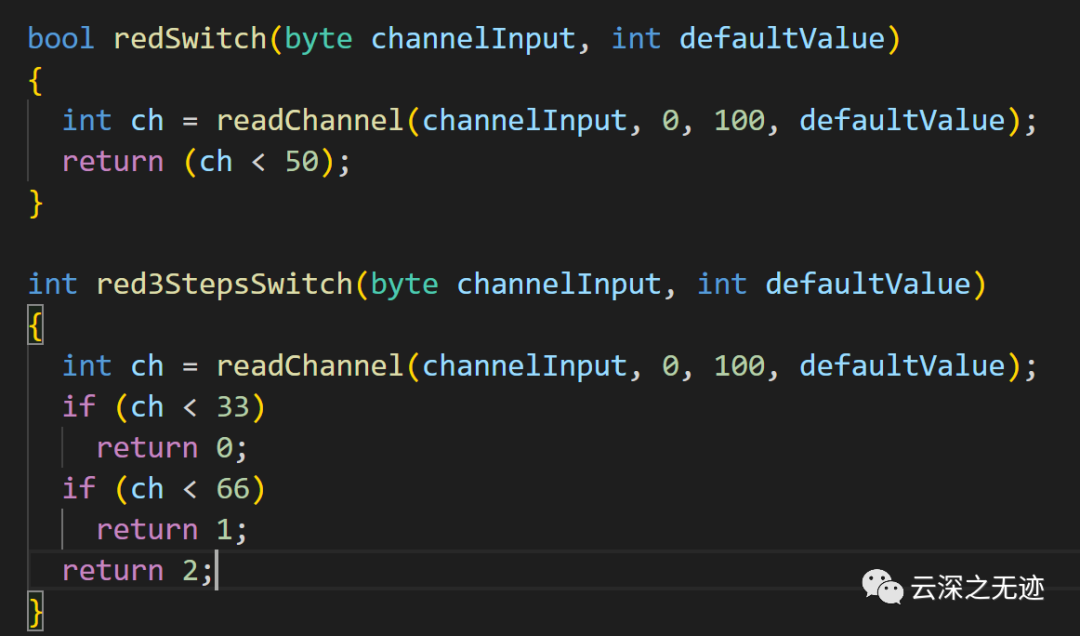
这个是拨钮开关和三段式开关,控制飞行起落的
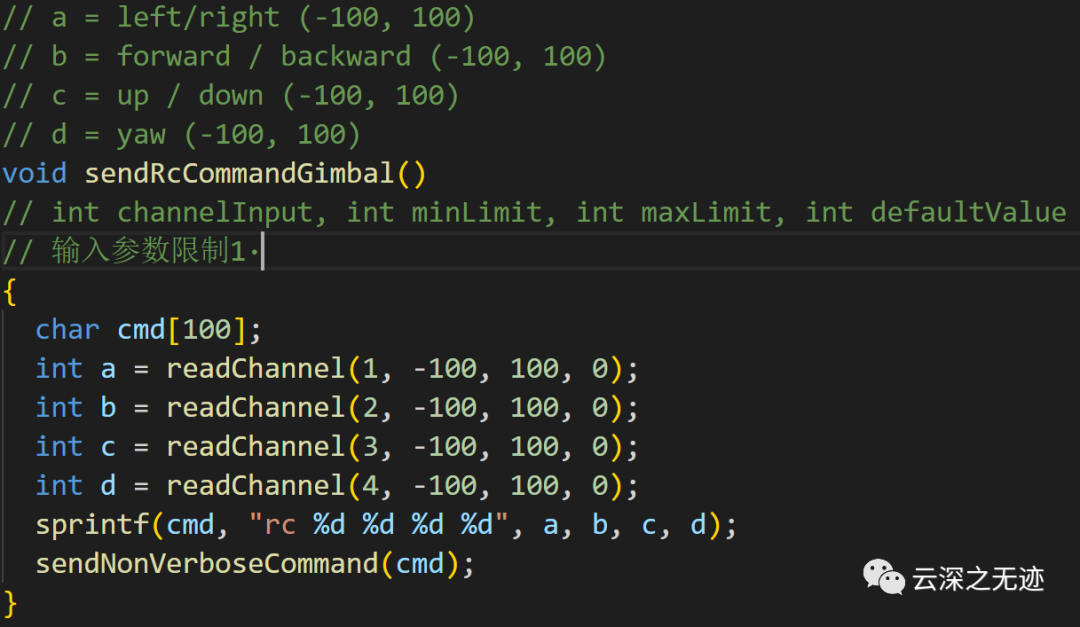
这个就是我们心心念念的RC函数了,写入到cmd,然后UDP发送
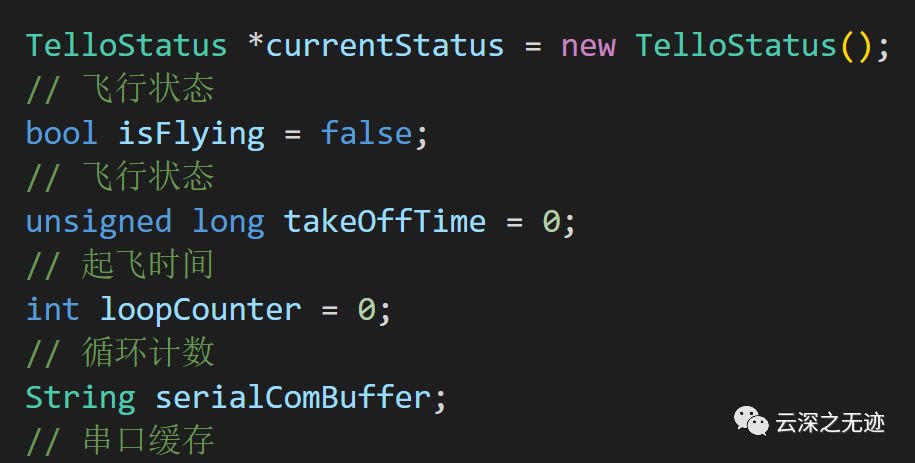
一些前置准备
这里就是和RC遥控器的纠葛了
把取到的字符串开始拆解:
channelNumber:value读到>的时候,开始取出通道后面的值。后面也有一段终端的打印代码。
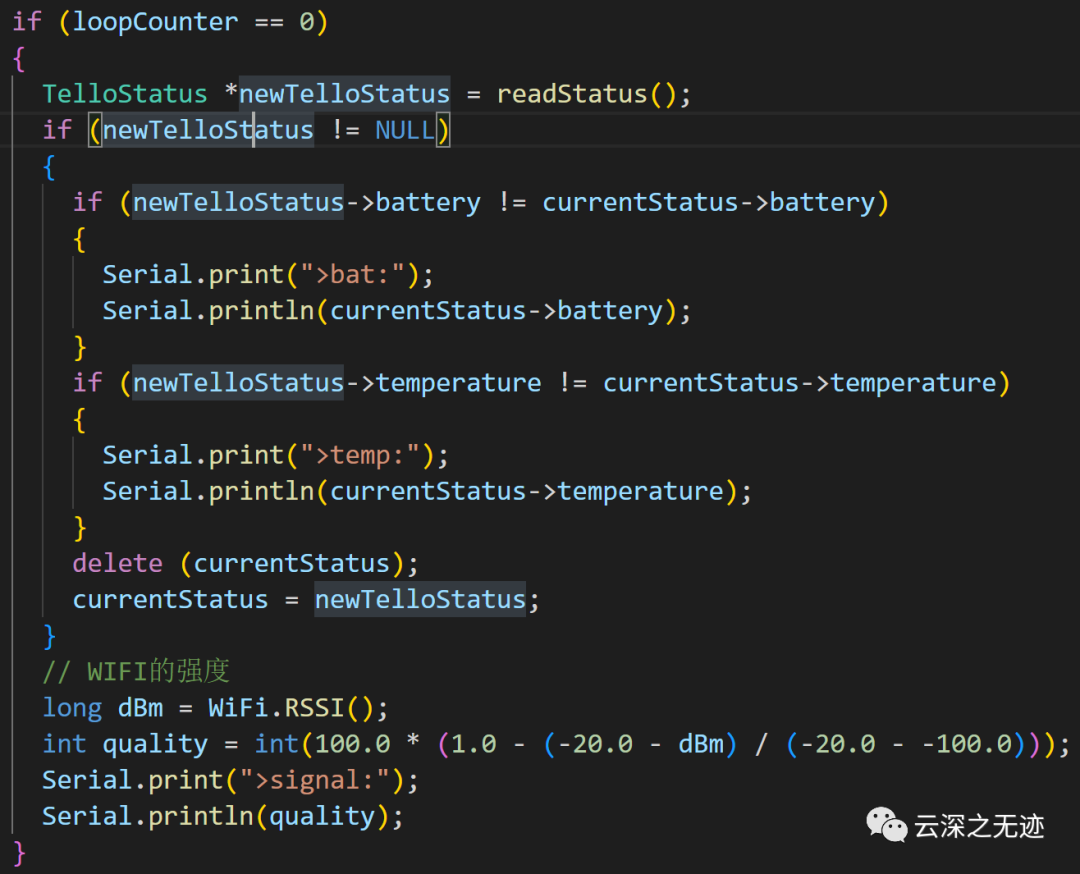
这个是快速的打印电池和温度的信息,也可以自己加wifi强度等信息。
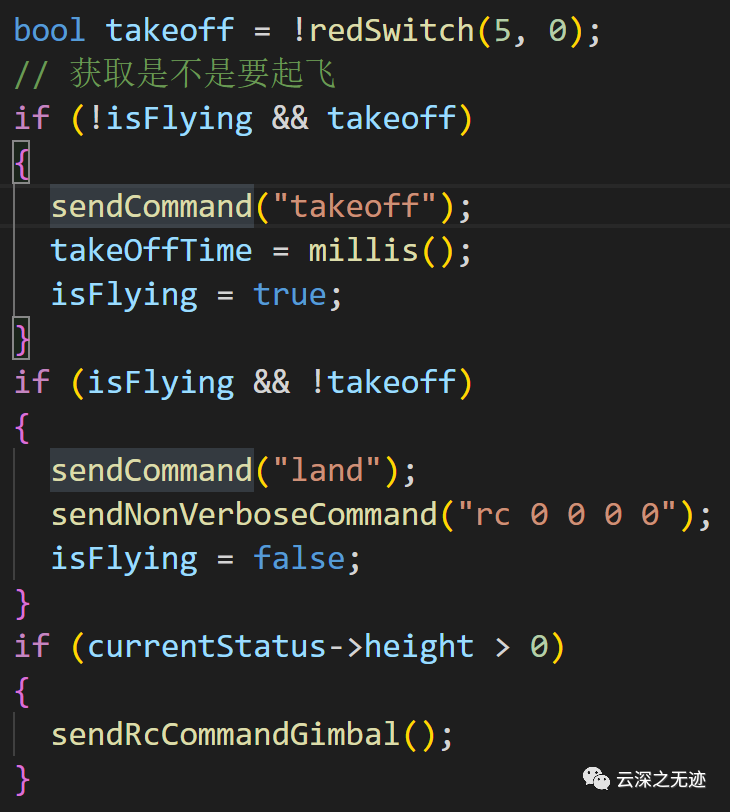
如果要起飞的话,就发送,也会检查降落情况,顺便油门全关。
之后就是发送RC控制了。
不知不觉写了这么多,受益匪浅了,睡觉去了~
视频演示稍后附上。

小彭同学的摄影技术越来越(๑•̀ㅂ•́)و✧
欢迎领取
https://terra-1-g.djicdn.com/2d4dce68897a46b19fc717f3576b7c6a/Tello%20%E7%BC%96%E7%A8%8B%E7%9B%B8%E5%85%B3/For%20Tello/Tello%20SDK%20Documentation%20EN_1.3_1122.pdfhttps://arduino-esp8266.readthedocs.io/en/latest/libraries.htmlhttps://www.arduino.cc/reference/en/libraries/wifi/https://github.com/espressif/arduino-esp32/tree/master/libraries/WiFihttp://arduiniana.org/libraries/newsoftserial/https://blog.csdn.net/m0_61543203/article/details/126706199https://blog.csdn.net/m0_51220742/article/details/123568721?spm=1001.2014.3001.5501https://blog.csdn.net/m0_51220742/article/details/123791062https://github.com/espressif/arduino-esp32/tree/master/libraries/WiFihttps://github.com/espressif/arduino-esp32/tree/master/libraries/AsyncUDP
https://packetsender.com/https://forum.arduino.cc/t/mega-wifi-r3-atmega2560-esp8266-8-mb-memoire/446340/12https://www.instructables.com/Arduino-MEGA-2560-With-WiFi-Built-in-ESP8266/https://www.amazon.it/ATmega2560-ESP8266-USB-TTL-NodeMCU-Arduino/dp/B07HML8DZDhttps://github.com/werneckpaiva/telloRChttps://github.com/esp8266/Arduinohttps://terra-1-g.djicdn.com/851d20f7b9f64838a34cd02351370894/RM-TT/RoboMaster%20TT%20Arduino%20IDE%20%E4%BD%BF%E7%94%A8%E8%AF%B4%E6%98%8E.pdfhttps://dl.djicdn.com/downloads/RoboMaster%20TT/Tello_SDK_3.0_User_Guide_cn.pdfhttps://github.com/tianbot/rmtt_roshttps://www.dji.com/cn/robomaster-tt/downloadshttps://login.squarespace.com/api/1/login/oauth/provider/authorize?client_id=qNgYXXcY8Fa8M&redirect_uri=https%3A%2F%2Fflysky.squarespace.com%2Fauth%2Foauth%2Fconnect%3FdestinationUrl%3Dhttps%253A%252F%252Fflysky.squarespace.com%252Fconfig%252F%253FframeUrl%253D%252Fchinese-blog-1%252F2019%252F9%252F28%252Fafhds3-ibus-&state=1%3A1674458861%3AtrpJciNyjaO3jrl3EHDMTFPuKwVuHAQ08JV%2Fg9QF9tE%3D&overrideLocale=en-US&options=%7B%22isCloseVisible%22%3Afalse%2C%22isCreateAccountViewActive%22%3Afalse%7D