
来源:直观学机械
视频来源:Boston Dynamics
没错,还是那个一直苦练本领,身上已经挂满无数伤痕的Atlas。现在的Atlas的头部有两个摄像头,一个是彩色相机,另一个则是深度相机,用TOF飞行时间来测量距离。
依靠这两个摄像头,Atlas来寻找环境中的形状和其他特征,来识别关键物体信息。找到了关键物体之后,依照它现有的姿势等属性来思考如何将它抓取上来,这就涉及到了控制系统。

这其中,波士顿动力的工程师们提到了一项关键技术:模型预测控制,即思考未来会发生什么来进行控制。

比如,在机器人推动和自己体重差不多的箱子之前,就要仔细考虑物体的位置、移动速度,以及两者之间的力,如何不会摔倒等问题。

而在执行方面,有类似于F1赛车的液压系统,每次Atlas活动完后,还有专门的电气“医生”诊断把关。除此之外,工程师们还造了一个虚拟世界。Atlas要在模拟环境中开发学习,再来到现实中测试。
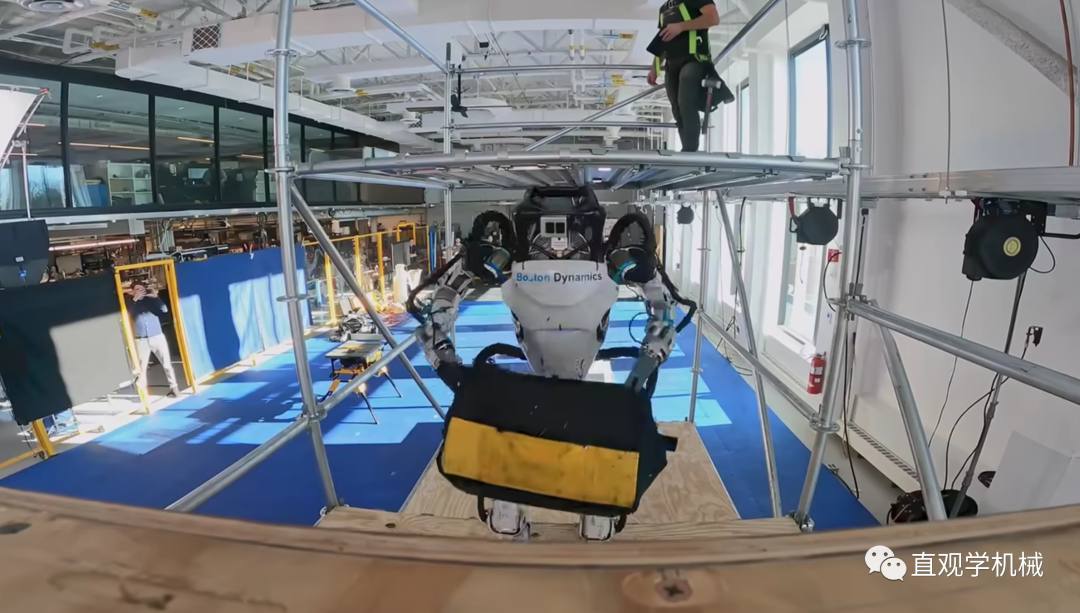
新的视频中,忙碌的工程师又忘记带工具了,他操作Atlas帮忙拿上来,接到命令的Atlas开始环顾四周来完成任务,它找到一块木板:

给自己搭建了一个登上脚手架的通道:
然后兴奋的找到工具包并拎起来:


接下来就是迅速的拎着工具包从刚才搭建好的通道上跑上脚手架:

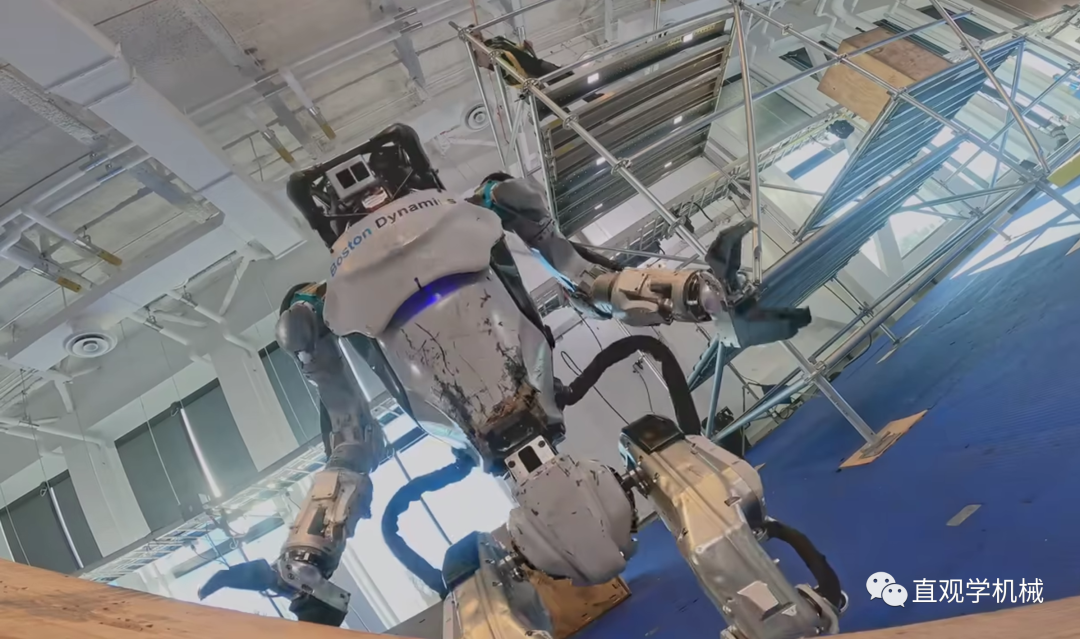
一路跑到倒数第二层后,一个转后承接一个双手抡起来的动作,把工具包顺势扔给了工程师:

完成任务后,Atlas并没有原路返回,它把身边的箱子推到地上:

箱子垫好后,它就迅速跳下。仔细看,它还会伸出双手保持平衡,简直与人无异:

最后最精彩的一个动作,——原地360°后空翻站稳,完美!

Atlas掌控着周边环境,与物体进行交互,还可以设定、修改线路和目标。这是对机器人的运动和感知系统的又一次极限挑战。来看一下视频:

前面的技术动作锁定之后,还要完善和优化跑酷的动作,速度太快时就容易跌倒:

其实波士顿动力在2022年底也更新了一个庆祝圣诞节的小片,是关于波士顿Spot机器狗的,三条狗合作,终于给圣诞树挂上了花:
狗多力量大,再高也不怕。两个视频的主体都是协作完成任务,是不是预示着波士顿动力机器人接下来的研究工作将会在人机协作、机机协作、机狗协作上进行突破呢。。。
2023第二届中国标杆智能工厂评选启动
切勿错失参评良机


