

摘要:能不能在ARM板上运行Ubuntu呢?答案是可以的。Ubuntu是Linux系统的一种,可以简单的将Ubuntu理解为一个根文件系统,就跟用busybox、buildroot制作的根文件系统一样。因此,移植Ubuntu也就是将Ubuntu根文件系统移植到我们的开发板上。
Ubuntu的移植非常简单,不需要我们编译任何东西,因为Ubuntu官方已经将根文件系统制作好了!我们只需要简单配置一下Ubuntu官方提供的base根文件系统,使其在我们的开发板上跑起来即可。
首先需要下载Ubuntu-base,我们移植Ubuntu16.04版本根文件系统。第一步肯定是到Ubuntu官方去下载16.04的根文件系统,根文件系统下载地址为http://cdimage.ubuntu.com/,下载界面如图所示:
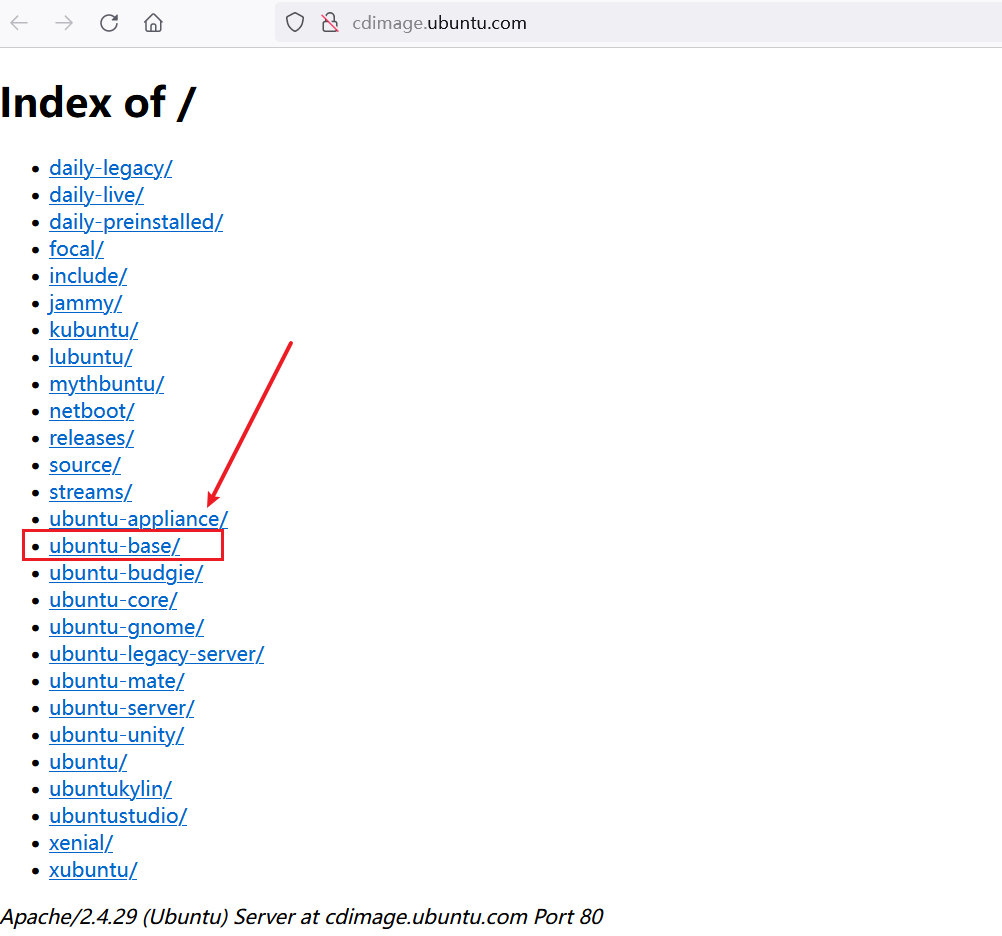
点击图中的ubuntu-base,进入到ubuntu-base下载界面:

点击图中的“releases”,下载releases版本的根文件系统,进去以后如图所示:
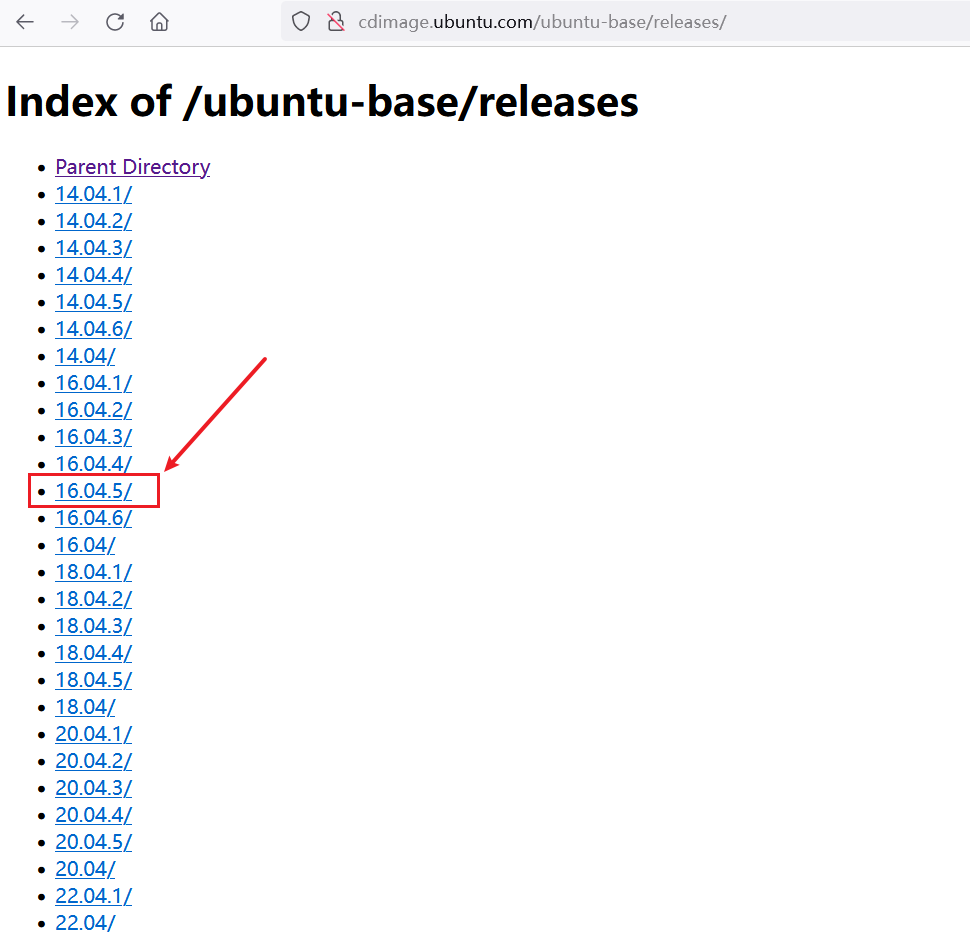
Ubuntu提供了从12.04开始,一直到最新的19.10版本的 ubuntu-base供大家下载。我们选择16.04.5,点击以后进入如图所示界面:
点击图中的“release”,进入16.04.5的下载界面,如图所示:
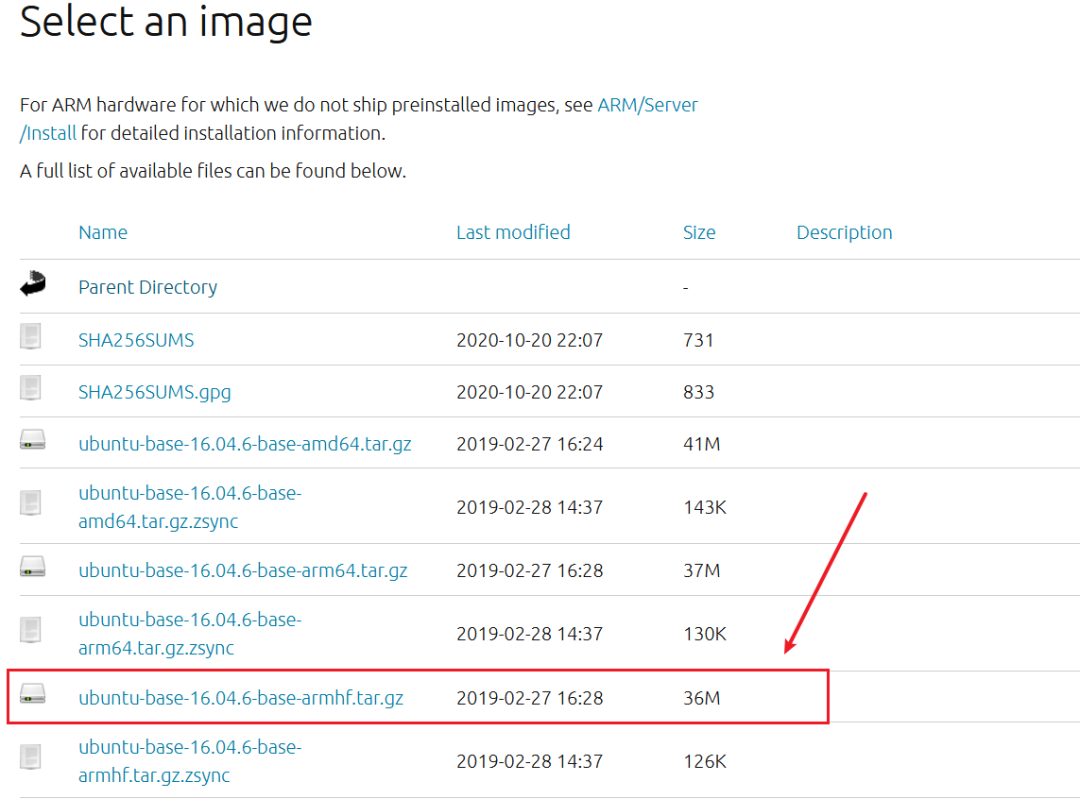
Ubuntu针对不同的CPU架构提供相应的ubuntu-base根文件系统,有amd64(64位X86)、armhf、i386(32位X86)、powerpc、ppc64el等系统的。I.MX6ULL是Cortex-A内核的CPU,并且有硬件浮点运算单元,因此选择armhf版本。
为了存放 ubuntu-base根文件系统,先在PC的Ubuntu系统中的nfs目录下创建一个名为ubuntu_rootfs的目录,命令如下:
cd /home/zhiguoxin/linux/nfs //进入到 nfs 目录下
mkdir ubuntu_rootfs //创建名为“ubuntu_rootfs”目录
将下载得到的ubuntu-base-16.04.5-base-armhf.tar.gz拷贝到上面创建的ubuntu_rootfs目录中,然后使用如下命令对其解压缩:
sudo tar -vzxf ubuntu-base-16.04.5-base-armhf.tar.gz
解压完成以后如图所示:

ubuntu-base解压以后就是大家最常见的linux根文件系统,但是目前还不能直接使用,还需要对其做一些其他的配置。
需要在PC的Ubuntu上安装qemu工具,命令如下:
sudo apt-get install qemu-user-static
将刚刚安装的qemu-user-static拷贝到刚刚解压出来的ubuntu-base目录中,也就是ubuntu_rootfs/usr/bin目录下,命令如下:
cd /home/zhiguoxin/linux/nfs/ubuntu_rootfs //进入到 ubuntu_rootfs 目录下
sudo cp /usr/bin/qemu-arm-static ./usr/bin/ //拷贝 qemu-arm-static
我们在ubuntu下使用apt-get安装软件的时候,是从网上下载软件并安装的,因此需要指定软件源。在设置软件源之前先将 Ubuntu主机下的DNS配置文件/etc/resolv.conf 拷贝到根文件系统中,命令如下:
cd /home/zhiguoxin/linux/nfs/ubuntu_rootfs //进入到 ubuntu_rootfs 目录下
sudo cp /etc/resolv.conf ./etc/resolv.conf //拷贝 resolv.conf
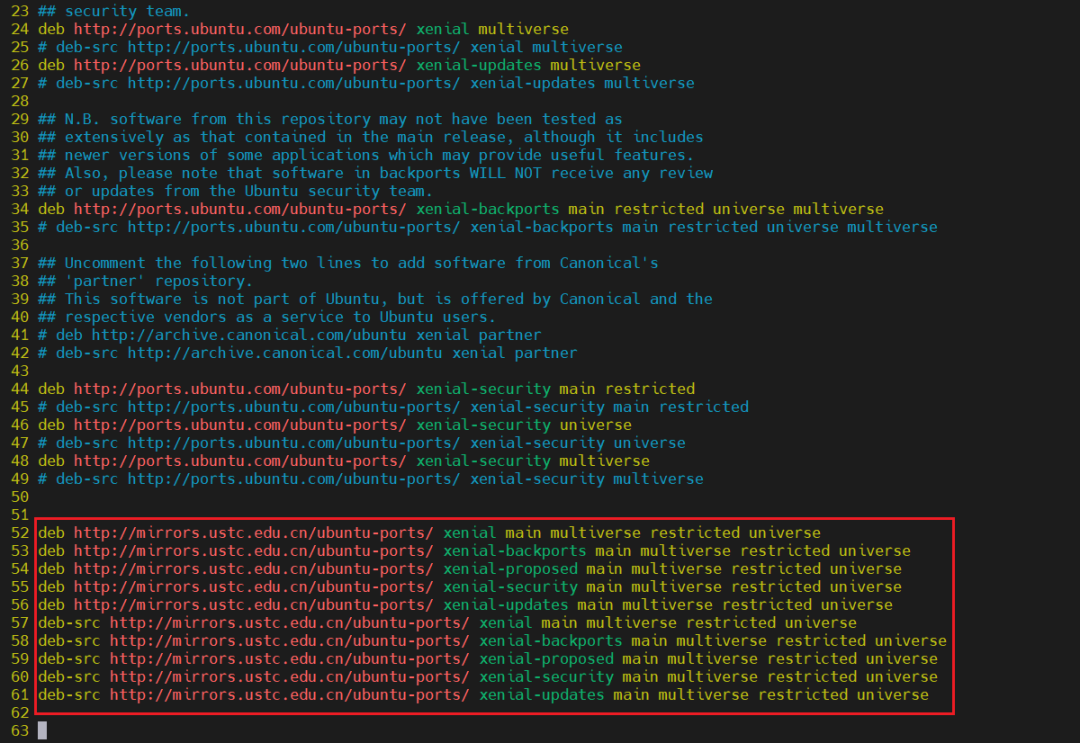
设置软件源,打开根文件系统中的ubuntu_rootfs/etc/apt/sources.list 文件,在此文件最后面添加软件源,比如国内常用的清华源、中科大源等等,这些软件源可以直接在网上查找。
注意,这里要用ubuntu16.04的ARM源,不能找成了 X86的源。
vi etc/apt/sources.list
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-proposed main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-proposed main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main multiverse restricted universe
接下来将上面制作的根文件系统挂载的主机上,需要挂载proc、sys、dev、dev/pts等文件系统,最后使用chroot将主机的根文件系统切换到我们前面制作的根文件系统中。
这里我们通过两个脚本文件来完成挂载和卸载操作,首先是挂载脚本 mount.sh,在ubuntu_rootfs目录下创建一个名为mount.sh的shell脚本,然后在里面输入如下所示内容:
#!/bin/bash
echo "MOUNTING"
sudo mount -t proc /proc
/home/zhiguoxin/linux/nfs/ubuntu_rootfs/proc
sudo mount -t sysfs /sys
/home/zhiguoxin/linux/nfs/ubuntu_rootfs/sys
sudo mount -o bind /dev /home/zhiguoxin/linux/nfs/ubuntu_rootfs/dev
sudo mount -o bind /dev/pts
/home/zhiguoxin/linux/nfs/ubuntu_rootfs/dev/pts
sudo chroot /home/zhiguoxin/linux/nfs/ubuntu_rootfs
再编写一个卸载的脚本文件,新建名为unmount.sh的shell脚本,在里面输入如下所示内容:
#!/bin/bash
echo "UNMOUNTING"
sudo umount /home/zhiguoxin/linux/nfs/ubuntu_rootfs/proc
sudo umount /home/zhiguoxin/linux/nfs/ubuntu_rootfs/sys
sudo umount /home/zhiguoxin/linux/nfs/ubuntu_rootfs/dev
sudo umount /home/zhiguoxin/linux/nfs/ubuntu_rootfs/dev/pts
最后给予mount.sh和unmount.sh这两个shell脚本可执行权限,命令如下:
sudo chmod 777 mount.sh unmount.sh
一切准备就绪以后执行mount.sh脚本,将制作的根文件系统挂载到主机下,输入如下命令:
./mount.sh
挂载成功以后如图所示:
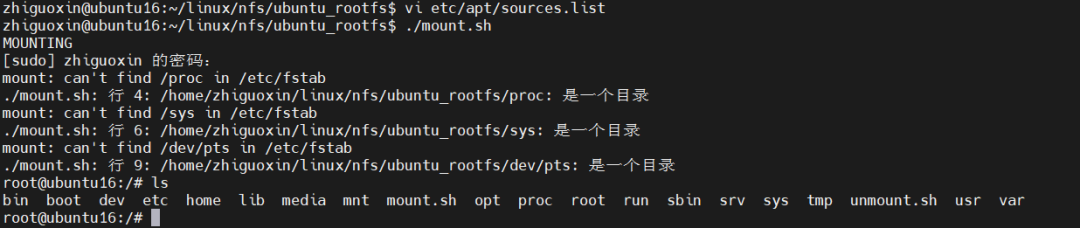
可以看出,当前终端已经将根文件系统切换到了我们上面制作的ubuntu_rootfs根文件系统中。
由于ubuntu base是一个最小根文件系统,很多命令和软件都没有,因此我们需要先安装一下常用的命令和软件,输入如下命令(注意是在电脑的Ubuntu下输入这些命令,因为现在电脑的Ubuntu正挂载着我们移植的Ubuntu-base根文件系统):
apt update
apt install sudo
apt install vim
apt install kmod
apt install net-tools
apt install ethtool
apt install ifupdown
apt install language-pack-en-base
apt install rsyslog
apt install htop
apt install iputils-ping
我们就先安装这些命令和软件,保证ubuntu base根文件系统能够在开发板上正常启动即可,等启动以后再根据实际情况继续安装其他的命令和软件。
设置一下root用户的密码,这里我设置简单一点,root用户密码也设置为root,相当于用户名和密码一样,命令如下:
passwd root //设置root用户密码
输入passwd root以后会让你输入root用户密码,输入两次即可。
输入如下命令设置本机名称和IP地址:
echo "zhiguoxin_imx6ul" > /etc/hostname
echo "127.0.0.1 localhost" >> /etc/hosts
echo "127.0.0.1 zhiguoxin_imx6ul" >> /etc/hosts
ubuntu根文件系统在开发板上启动以后我们通常也希望串口终端正常工作,首先确定自己所使用的串口设备文件,比如正点原子的MINI开发板使用的UART1对应的串口设备文件为ttymxc0,我们需要添加一个名为getty@ttymxc0.service 的链接,链接到getty@.service服务上,输入如下命令:
ln -s /lib/systemd/system/getty@.service /etc/systemd/system/getty.target.wants/getty@ttymxc0.service
设置好以后,就可以退出根文件系统了,输入如下命令退出:
exit
退出以后再执行一下unmount.sh脚本取消挂载,命令如下:
./unmount.sh

至此,ubuntu-base根文件系统就已经制作好了,接下来就是挂载到开发板上去测试。
根文件系统已经制作完成了,接下来就是测试,先用nfs挂载根文件系统,在uboot里面设置bootargs环境变量的值如下:
setenv bootargs 'console=tty0 console=ttymxc0,115200 root=/dev/nfs nfsroot=192.168.10.100:/home/zhiguoxin/linux/nfs/ubuntu_rootfs,proto=tcp rw ip=192.168.10.50:192.168.10.100:192.168.10.1:255.255.255.0::eth0:off'
saveenv
注意设置根文件系统为我们前面制作的ubuntu_rootfs。设置完成以后重启开发板,这个时候就会进入到ubuntu根文件系统中,如图所示:

可以看出,16.04.5版本的ubuntu根文件系统启动成功,并且要求我们输入用户名和密码,用户名和密码都是root。用户名和密码输入成功以后就会进入到系统,如图所示:
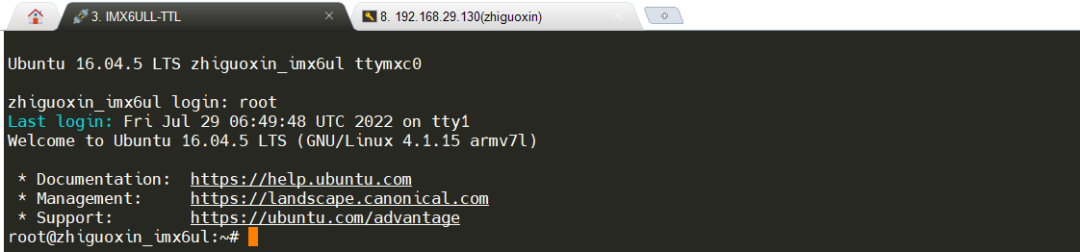
可以看出,ubuntu根文件系统工作正常,这个时候就可以在ARM板上玩Ubuntu系统了。
至此,ubuntu根文件系统已经完全在开发板上运行起来了,如果要安装什么软件的话直接使用apt工具即可,和我们在PC下使用ubuntu一样。比如我们安装cmatrix,那么就可以直接输入:
sudo apt-get install cmatrix//安装cmatrix
等待安装完成,完成以后就可以使用cmatrix了。
当然,也可以在arm板上运行黑客帝国矩阵代码cmatrix。具体可以点击文末“阅读原文”进行查看。

END
→点关注,不迷路←
