

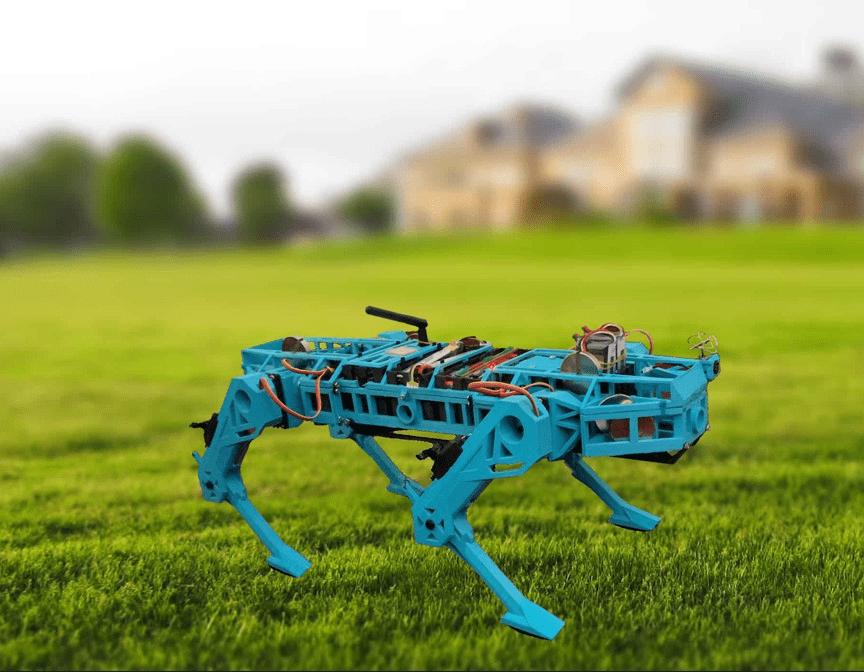

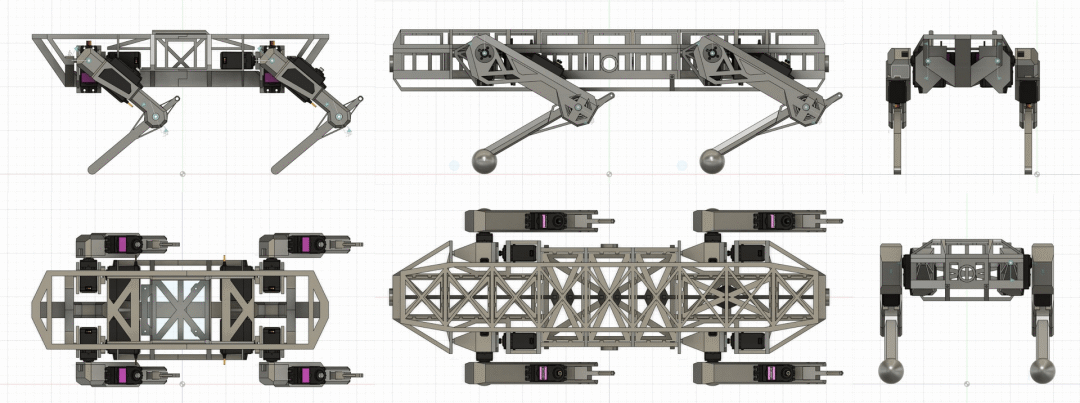
作者做的是一个完全由可替换模块组成的四足机器狗。这种模块化的方法使机器人可以比传统的机器人有更好的适应性,随着新模块的引入,该机器人平台的能力可以得到极大的增强。
该平台在默认配置下由六个不同的单元组成。核心是一个计算单元,负责收集输入,进行计算,并输出动作。由于Teensy 3.5的速度快,而且有大量的RAM/闪存,所以采用了它。此外,该单元还有一个Wi-Fi模块、一个GPS模块和一个用于定位数据的陀螺仪。主电池单元和备用电池单元用一对锂电池组为机器人提供电源,一个稳压器单元将电压降低到6V,用于舵机,3.3V/5V用于电子设备。最后,定位在腿部的压力传感器在压力下可以调整身体。
还有一个摄像头可以将实时视频发送到远程控制器上。
来源:https://hackaday.io/project/188660-lotp-robot-dog-v2
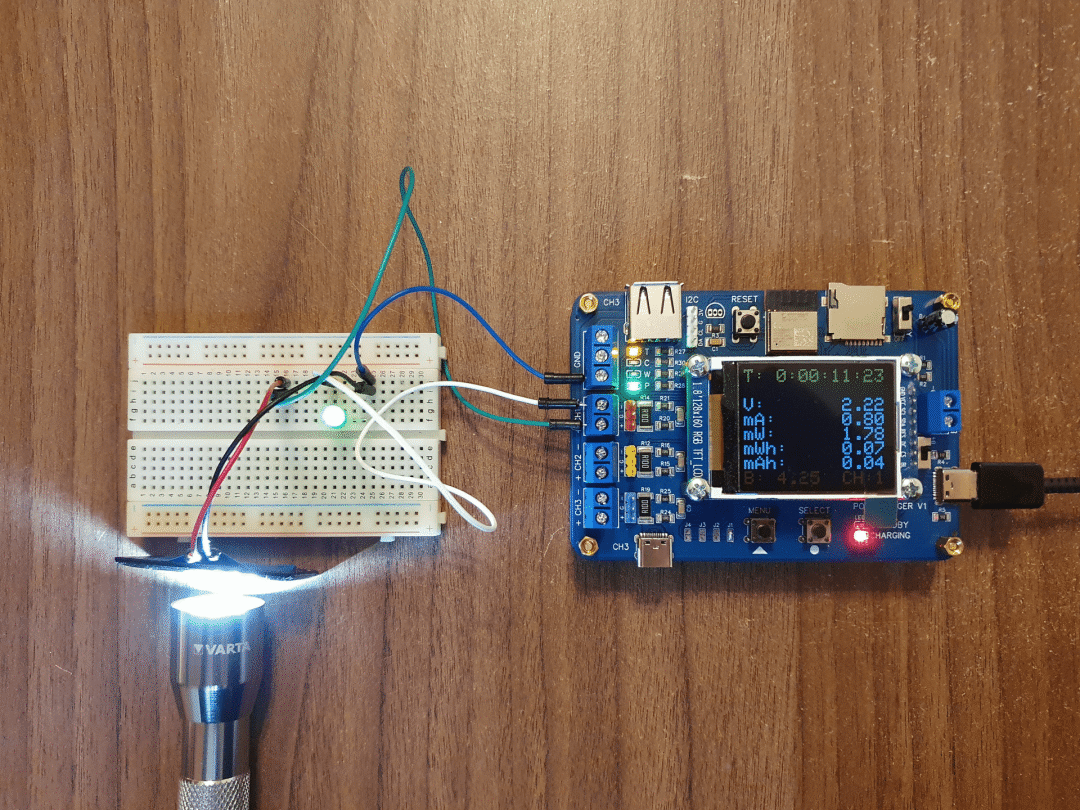
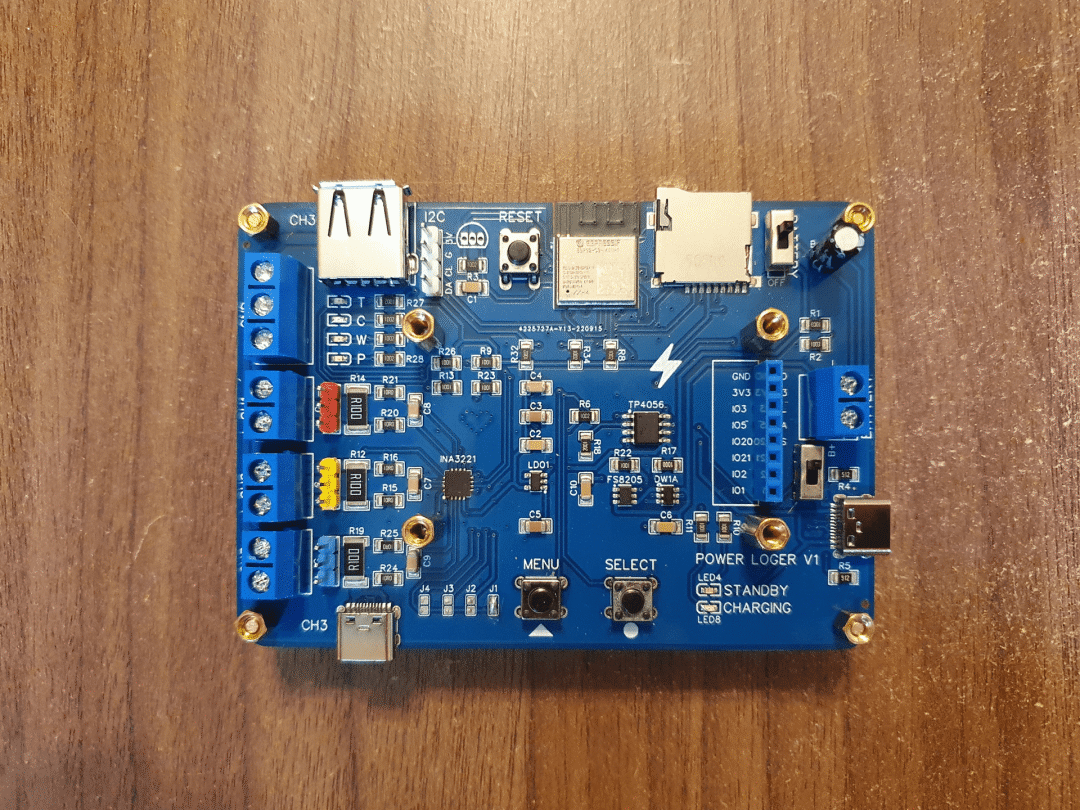
一个基于INA3221芯片的电源记录器,支持TFT显示、SD卡和电池(充电和监测)。
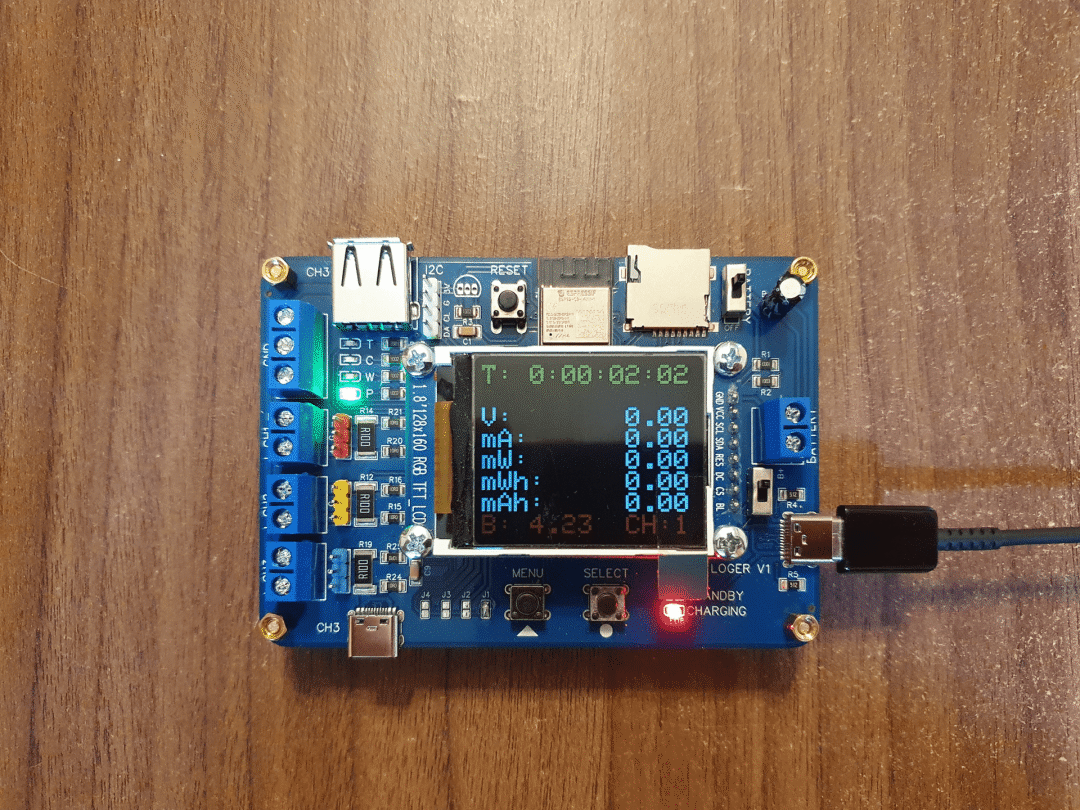
在一个电池或太阳能供电的项目中,我们往往需要知道到底跑了多少电流。
最简单的测量方法是使用INA219或INA3221模块,这些模块可以很便宜地找到。不过,这些模块有缺陷,往往需要修改才能按预期工作。
所以作者设计了这款功率记录器,它的功能很多,非常有意思,而且制作也相对容易。
来源:https://hackaday.io/project/187504-esp32-3-channel-power-logger
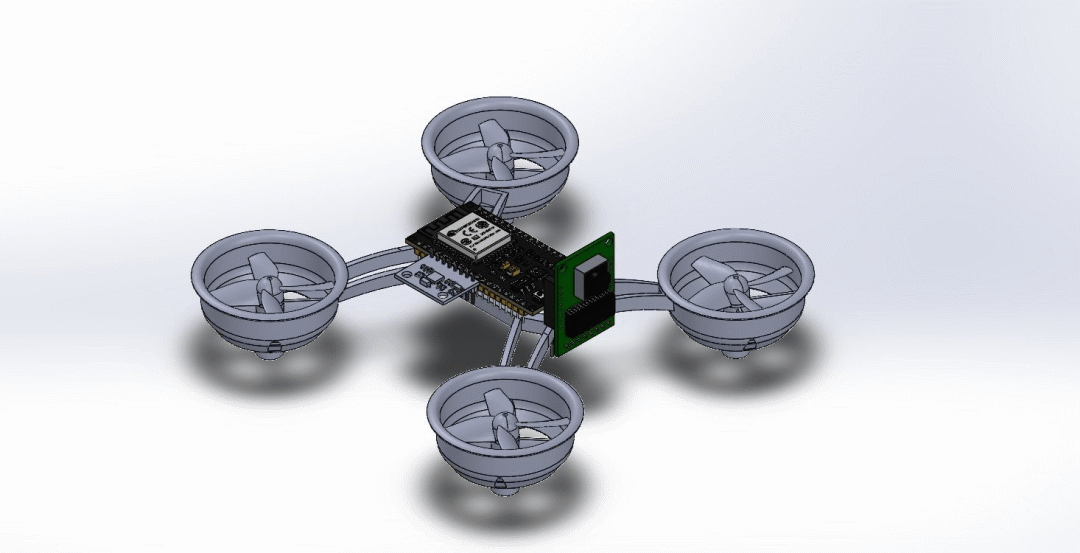
这个项目使用ESP-WROOM-32作为主飞行控制器,利用它的WIFI功能进行通信和控制,用GPIO运行直流电动机,用SPI和I2C运行ArduCAM mini 2mp plus相机,还有3轴陀螺仪MPU6050。
材料清单:
控制器方面,作者打算用软件来控制无人机。
使用rawdrawandroid,让安卓手机/平板电脑可以连接到ESP并控制无人机。
来源:https://hackaday.io/project/188578-esp32-drone

一个基于ESP32 Pico D4和一个小型TFT显示器的WiFi遥控器。它可以用来控制各种东西,作者用它来演示播放GIF图片。
来源:https://www.youtube.com/@makermoekoe

“鸿蒙之父”重申:鸿蒙不是安卓!
什么是特斯拉?他和爱迪生相爱相杀。

这些改变世界的数学公式,YYDS!

三极管和MOS管有什么不一样?用MOS管还是三极管?
