1. CANO简介
CANOe是德国Vector公司出的一款总线开发环境,全称叫CAN open environment,主要用于汽车总线的开发而设计的。CANoe的前期是为了对CAN通信网络进行建模、仿真、测试和开发,后来扩展加入了LIN、Ethernet、FlexRay、MOST等。
2. CANOE硬件版本区别
CANOE硬件分为3个版本,分别为Full,Run,和Pex,其中Full很好理解,支持全功能,Run版本仅支持CAPL脚本的运行,不支持CAPL脚本的修改和编译,其它功能与Full版相同,Pex只提供图形界面操作,实际使用很少。
区分Full版和Run版的方法有两个,一个是CANoe硬件背面标记,另外一个是连接电脑后,打开软件有显示。
3.CANO界面介绍
下图展示了CANOE的基础页面,主要包括导航栏、菜单栏、主界面、Trace。
其中导航栏又分为:
2. Home : Start/Stop CAN信号,新建Pannel等3.Analysis : 打开/关闭 Trace串口;4.simulation : 打开 IG操作界面;7.Environment : Pannel/CAPL相关;8.HardWare : 设置CANOe硬件的Channel;10.Layout : 主界面显示的Layout;
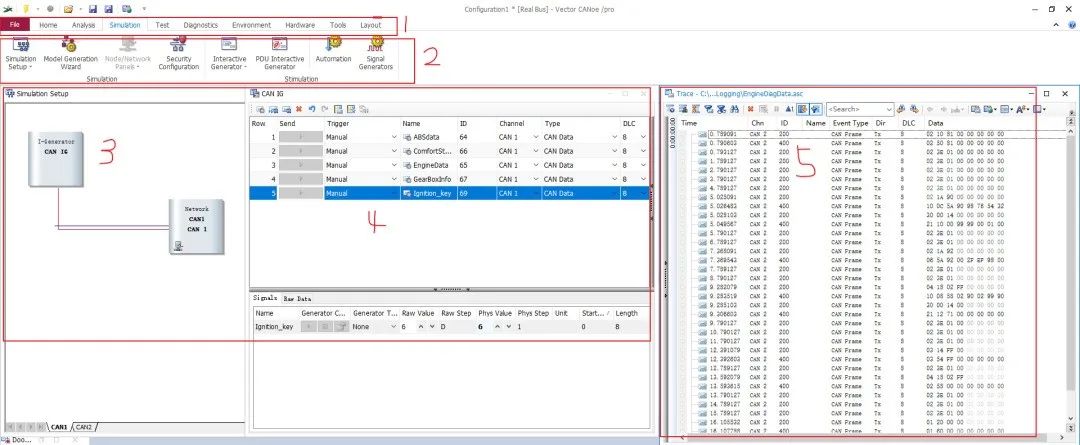
菜单栏主要是对导航栏的细化,主界面主要包括Simulation Setup,用IG模块模拟发送报文,或者用replay模块回放报文,建立capl模块等等,Trace界面主要用于CAN、以太网信号的显示。
4.新建CANOE工程
首先肯定是打开CANOE,然后点击File→New Configuration新建工程;
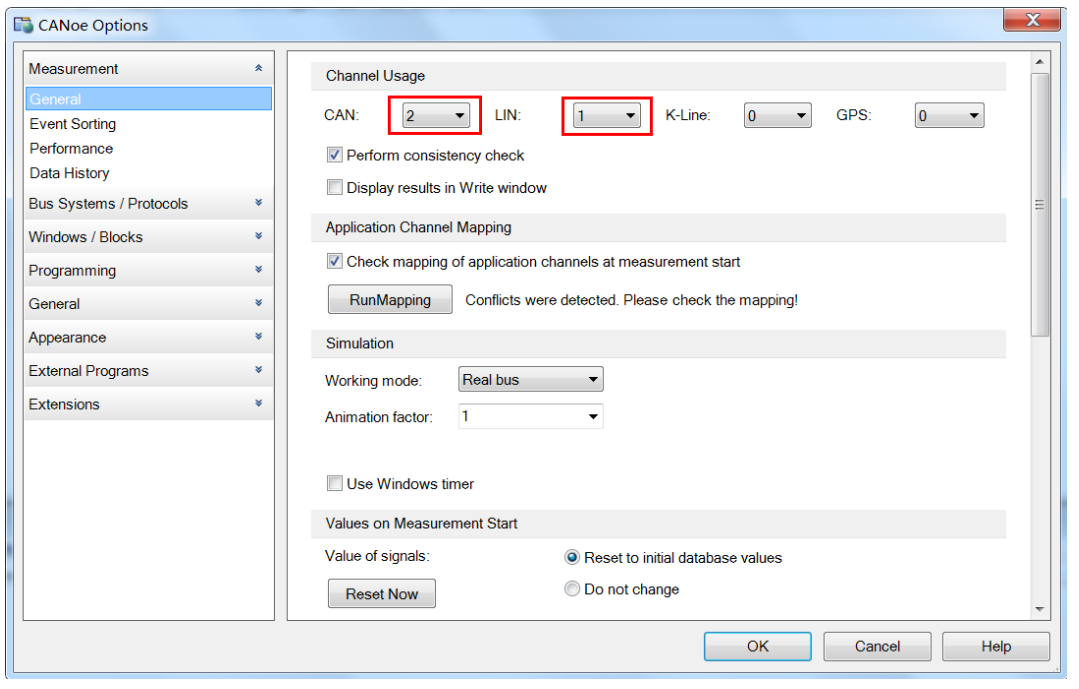
然后点击Configuration→Options,弹出CANoe Options 窗口,左边栏默认为General,在General配置中,需要选择通道的使用情况,注意这里选择的通道数不能超过 CANoe 实际的通道数。最后点击OK。
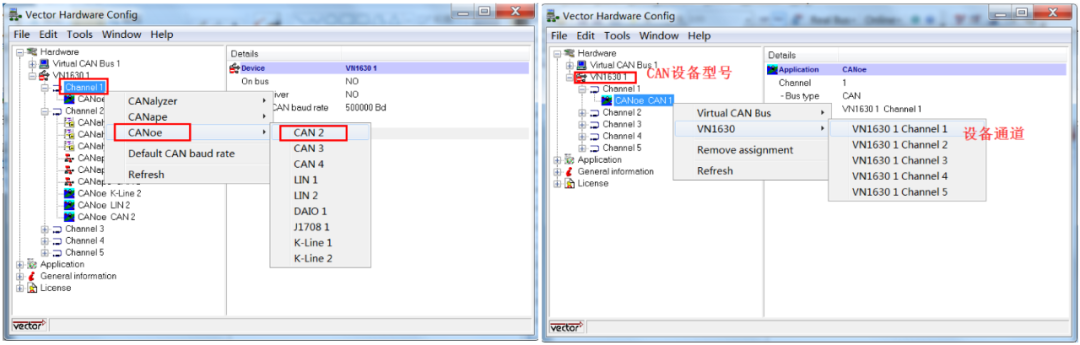
接下来就是配置CANoe 硬件通道接口,点击Configuration→Network Hardware,然后点击driver,配置连接的硬件。
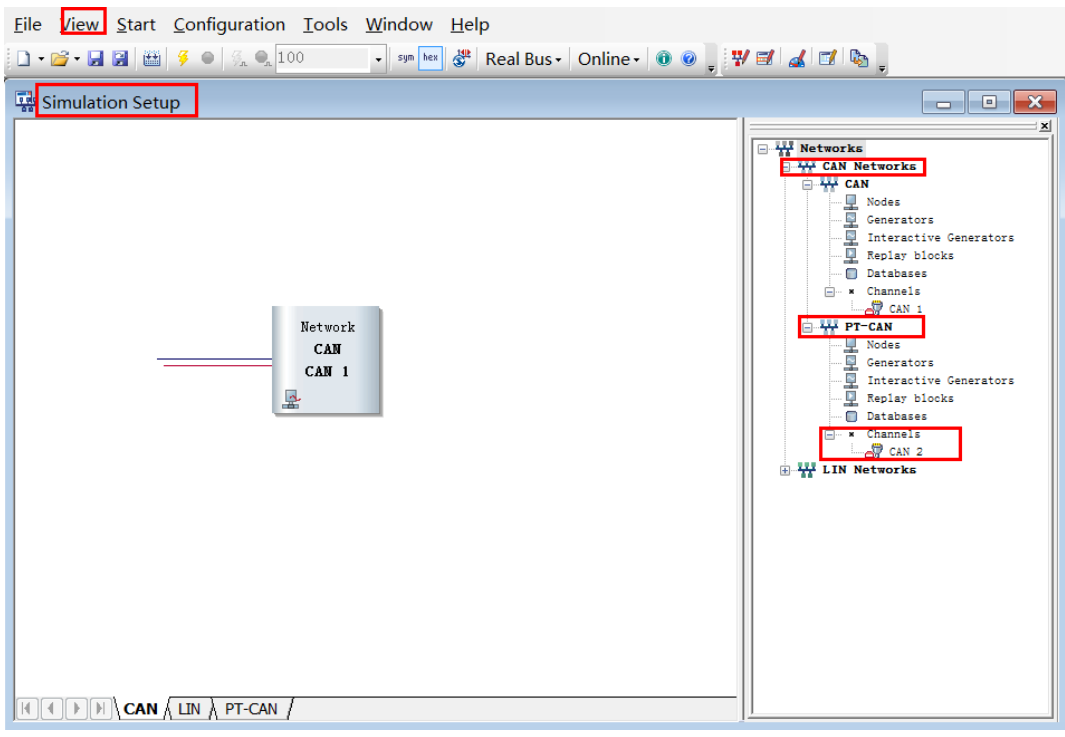
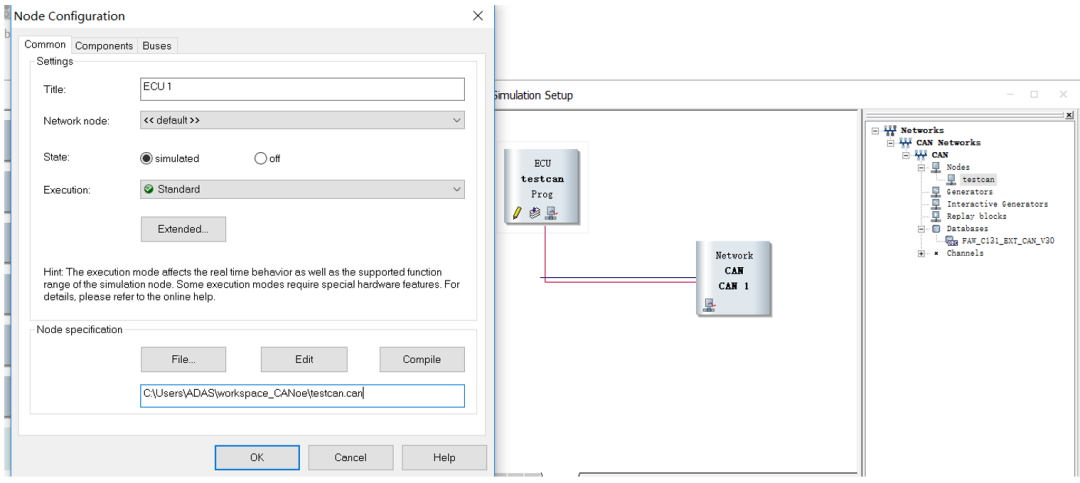
然后就是加载dbc了,点击菜单栏 View→Simulation Setup,弹出 CAN 模拟窗口,在窗口右侧的 CAN Network 上右击,增加CAN通道,然后在database出添加相应通达的dbc即可。
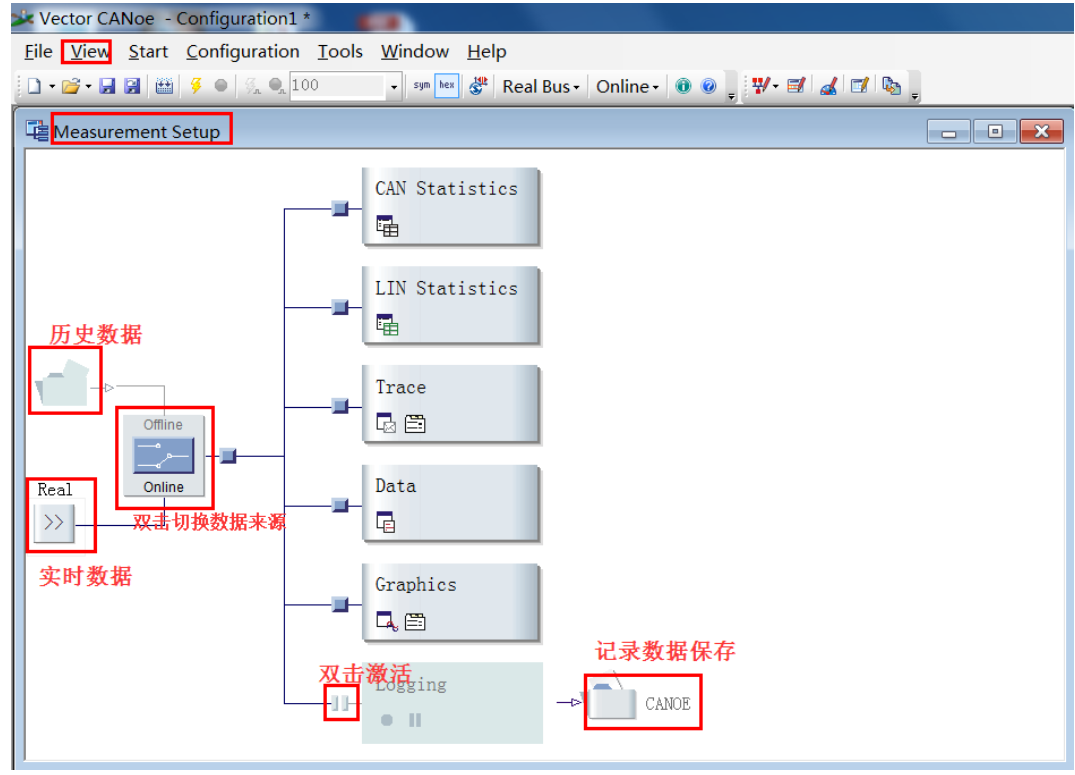
然后点击菜单栏 View→Measurement Setup,设置是否记录数据,以及数据时来源离线播放还是实际测试。
在这里,还可以添加过滤模块,来选择要记录的特定数据。
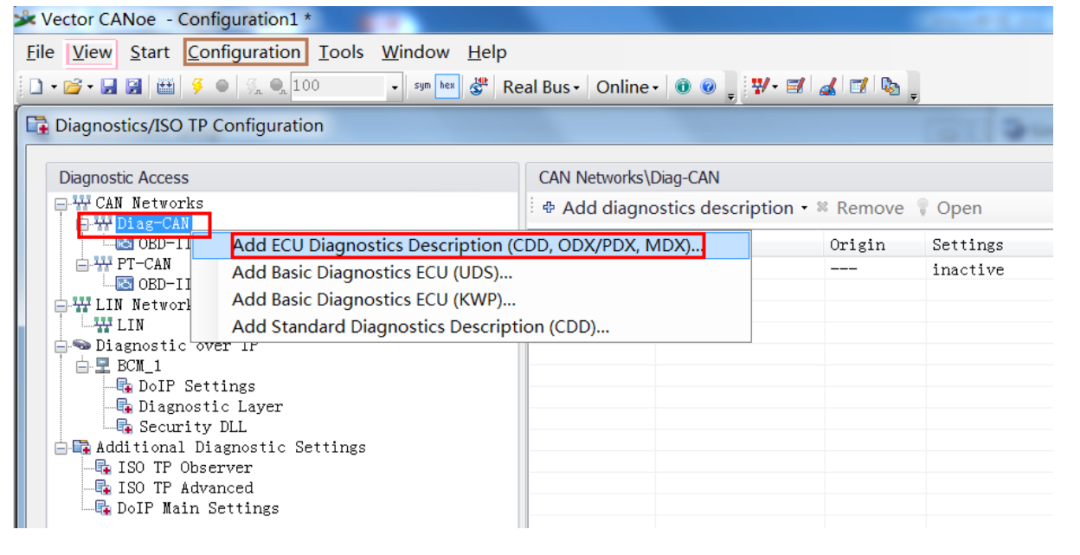
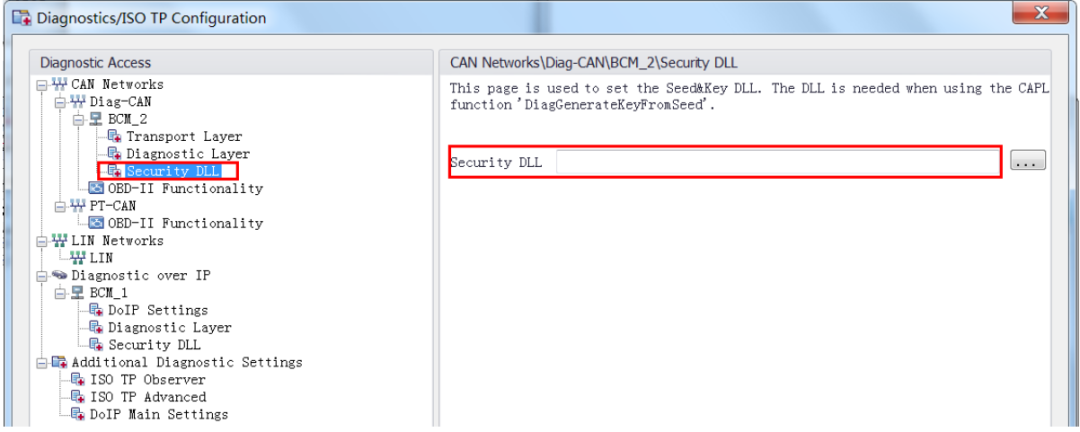
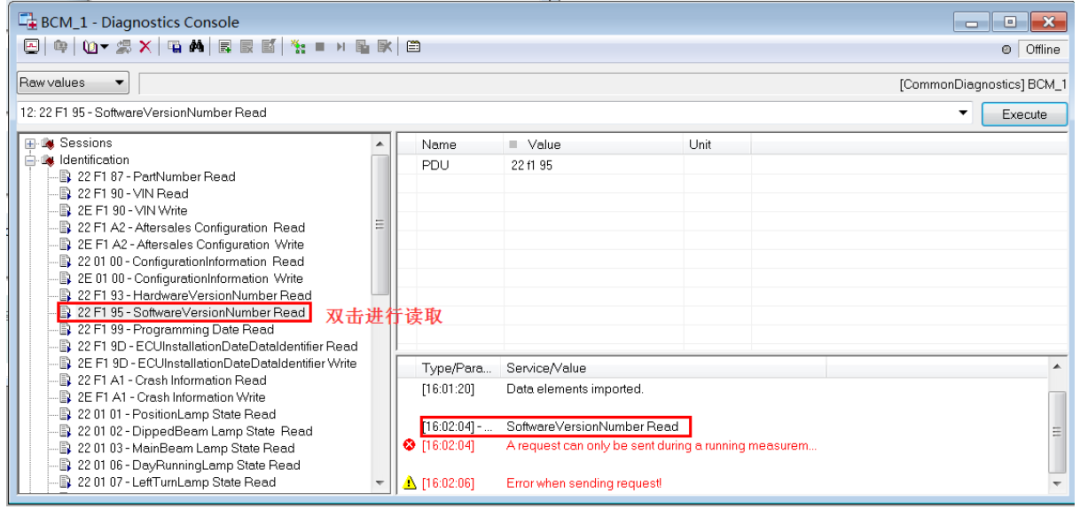
加载诊断功能的第一步,首先是需要在菜单栏 Configuration→Diagnotics/ISO TP..,弹出诊断配置窗口,在左侧栏的 CAN 网络上上右击, Add ECU…加载 cdd 诊断文件。加载完之后,基本大部分配置都有了,只需要在添加0x27服务的dll文件了。然后就可以正常使用cdd中添加的诊断服务了,只需要在下图的左边栏点击服务即可,有些比如写DID,还是需要在填写需要写入的数据的。
另外如果是需要做自动化测试,可以添加capl脚本模块,通过脚本来实现,下图是添加capl脚本模块,最后就是导入现有的.can文件,或者是开始愉快的编写capl脚本了。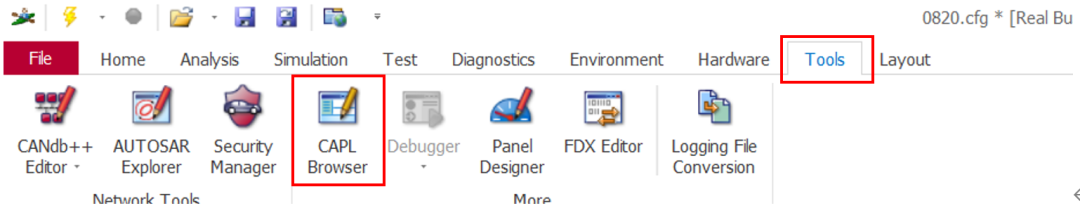
小鹏P7的热管理系统详解
大众ID4.X内部ECU技术细节整理
比亚迪海豹整车技术整理
揭秘理想的整车电子电气架构
国内主机整车EEA架构汇总
谈谈Bootloader自更新
谈谈对两家AUTOSAR工具看法
奥迪首款800V车型技术总览
汽车软件需求是如何变成用户功能?
汽车E/E架构的网络安全分析
电子电气架构设计需要考虑哪些方面?
分享不易,恳请点个【👍】和【在看】