点击左上方蓝色“一口Linux”,选择“设为星标”
所有瑞芯微的文章合集,建议订阅:
《瑞芯微文章合集》
上一篇我们讲解了如何编写gpio驱动,但是实际操作中,经常发现gpio引脚被占用的情况发生,那么本篇文章就详细讲解rxw平台下如何快速定位gpio复用问题以及如何解决。
要想查看某个GPIO引脚可以配置的功能以及地址信息,需要查看TRM手册:
《Rockchip RK3568 TRM Part1》
gpio2a2_sel
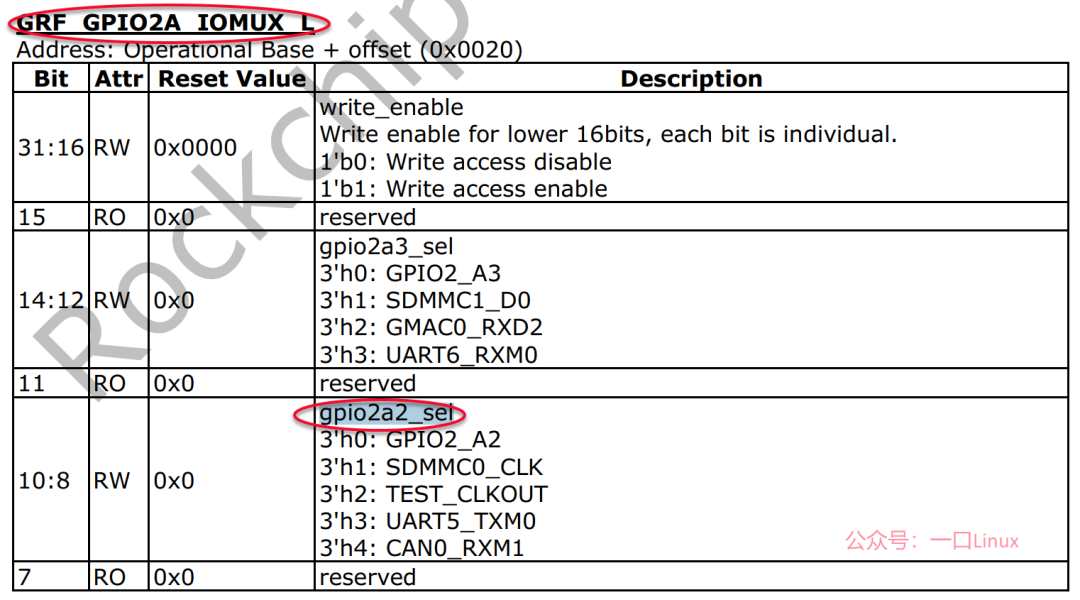 这样我们就可以直接找到该引脚iomux配置寄存器,bit[10:8]。该寄存器地址:
这样我们就可以直接找到该引脚iomux配置寄存器,bit[10:8]。该寄存器地址:
基地址+0x0020
那么如何找到基地址呢?
搜索该引脚寄存器的名字:
GRF_GPIO2A_IOMUX_L
注意向上搜索
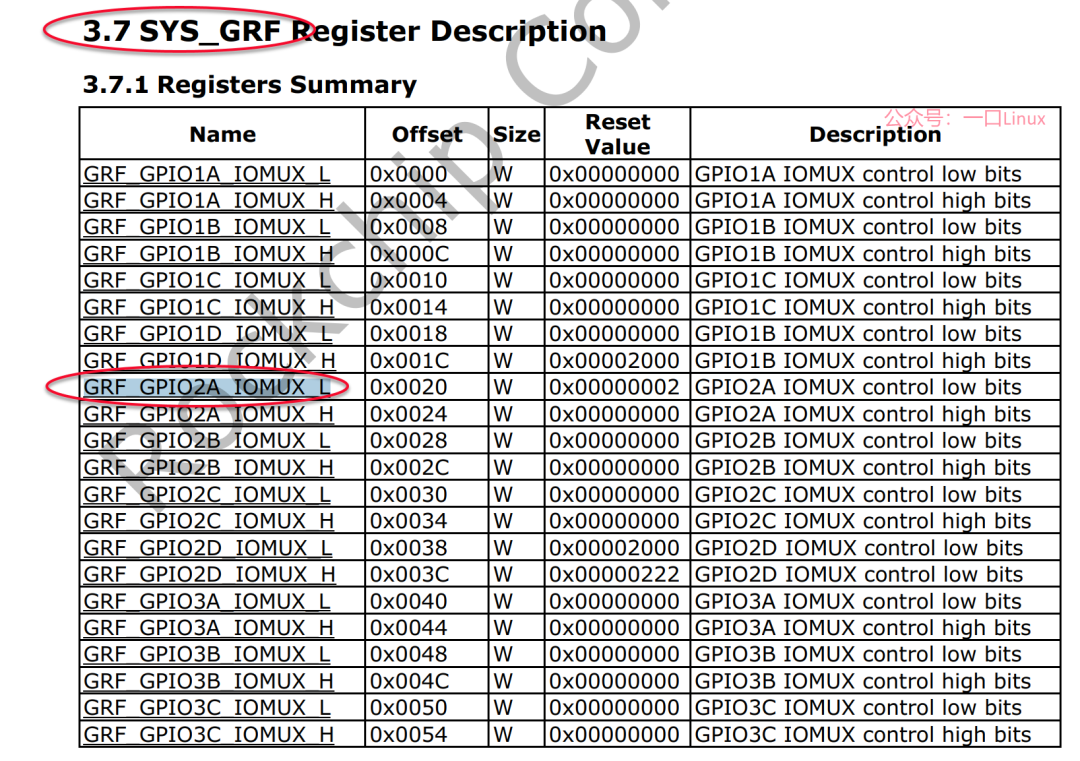 可以得到该寄存器基地址名称:
可以得到该寄存器基地址名称:
SYS_GRF
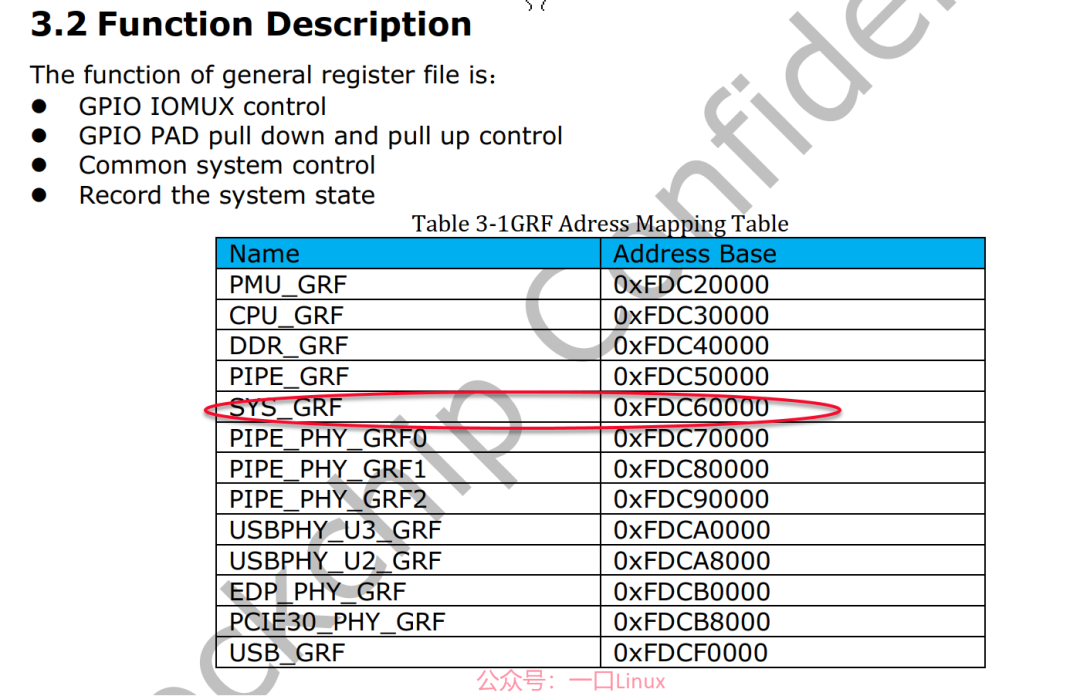 可得SYS_GRF 基地址
可得SYS_GRF 基地址
0xFDC60000
那么我们就得到了GPIO2 A2的IOMUX配置寄存器地址为
0xFDC60000 + 0x0020
该寄存器的bit[10:8]用于设置该寄存器功能。
当然也可以用下图来查找,更加方便: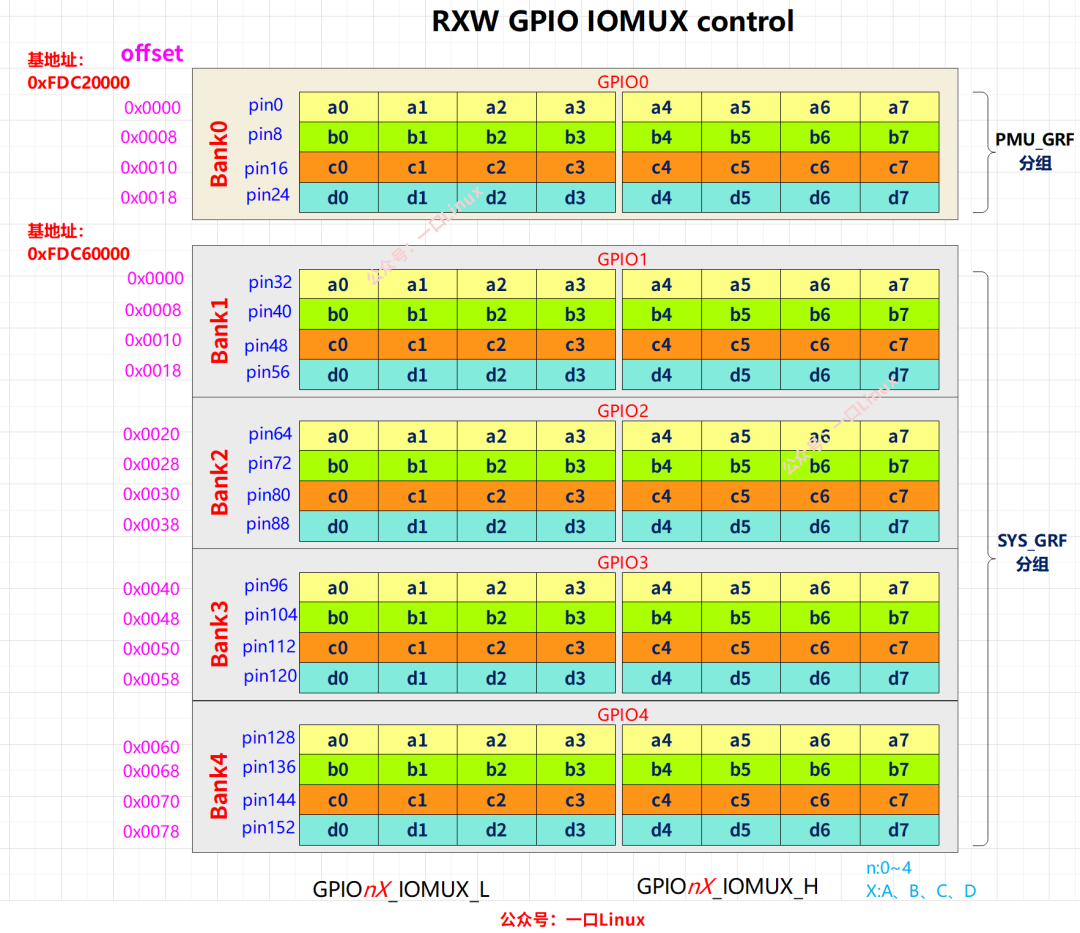
那么找到了这个寄存器地址,我要如何来直接读取这个寄存器的值呢?
这个可以借助于一个命令io。
io命令可以直接操作某个寄存器,用于查看设置某个PIO 引脚配置了什么iomux,非常方便。
RK 的 Android 平台,默认有包含 io 工具(源码位置:external\io), linux 系统平台如果没有此源码, 可以将 Android 平台此源码打包过去编译即可( linux 平台代码同步最新都已带有 IO 工具,可直接使用命令)。
vim drivers/char/Makefile
增加
+obj-$(CONFIG_DEVMEM) += mem.o
vim drivers/char/Kconfig
改文件已经包含下面信息
10 config DEVMEM
11 bool "/dev/mem virtual device support"
12 default y
13 help
14 Say Y here if you want to support the /dev/mem device.
15 The /dev/mem device is used to access areas of physical
16 memory.
17 When in doubt, say "Y".
io命令需要内核驱动支持,驱动文件如下:
drivers/char/mem.c
找到下面代码:
#ifdef CONFIG_DEVMEM
[1] = { "mem", 0, &mem_fops, FMODE_UNSIGNED_OFFSET },
#endif
修改为
+//#ifdef CONFIG_DEVMEM
[1] = { "mem", 0, &mem_fops, FMODE_UNSIGNED_OFFSET },
+//#endif
vim arch/arm64/configs/rockchip_defconfig
增加
+CONFIG_DEVMEM=y
重新编译内核,烧录重启。
rockchip_defconfig需要根据平台选择
rk3568_r:/ # ls /dev/mem -l
ls /dev/mem -l
crw------- 1 media media 1, 1 2017-08-04 09:00 /dev/mem
io命令正是通过这个字符设备来实现寄存器的读写的。
rk3568_r:/dev # io
io
Raw memory i/o utility - $Revision: 1.5 $
io -v -1|2|4 -r|w [-l ] [-f ] []
-v Verbose, asks for confirmation
-1|2|4 Sets memory access size in bytes (default byte)
-l Length in bytes of area to access (defaults to
one access, or whole file length)
-r|w Read from or Write to memory (default read)
-f File to write on memory read, or
to read on memory write
The memory address to access
The value to write (implies -w)
Examples:
io 0x1000 Reads one byte from 0x1000
io 0x1000 0x12 Writes 0x12 to location 0x1000
io -2 -l 8 0x1000 Reads 8 words from 0x1000
io -r -f dmp -l 100 200 Reads 100 bytes from addr 200 to file
io -w -f img 0x10000 Writes the whole of file to memory
Note access size (-1|2|4) does not apply to file based accesses.
读取gpio2 A2引脚配置寄存器
io -4 -l 0x30 0xFDC60000
-4 : 按字(4个字节) 访问内存
0x30 : 读取0x30(48)个字节
0xFDC60000 : 基地址
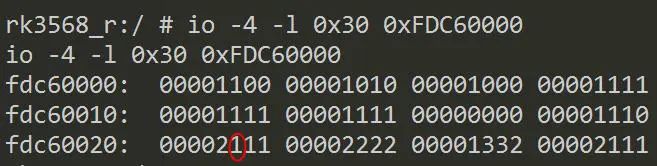
由上图可得0xFDC60020的bit[10:8]值为1
所以该io引脚被设置的iomux为
3'h1: SDMMC0_CLK
如果我们是希望通过设备树设置该引脚为普通gpio,那么该值应该为0,
那么这就说明了,我们设置失败了,
那就可以到设备树中查找设置SDMMC0的地方,将其注释掉。
要读取单个寄存器,可以用下面命令:
io -4 -r 0xFDC60024
比如已经通过命令:io -4 -r 0xFDC60024读出了寄存器的值,那么此时想把gpio2 A2修改为普通GPIO, 那么只需要对0xFDC60024这个寄存器的第 3 个 1 写 0,那么可以如下操作:
io -4 –w 0xFDC60024 0x01002011
注意:
修改过后,再查看,可以发现对应的位的值变为了1:
思 路 :驱 动 里 如 果 想 要 去 操 作 GPIO , 肯 定 会 调 用 到 gpio_direction_output 、gpio_direction_input、 gpiod_direction_output、 gpiod_direction_input 这几个接口, 他们的定义位置是:
vim kernel/drivers/gpio/gpiolib.c
在这些接口里添加判断对应查询的 IO 口条件,通过以下函数就可以打印出哪些模块复用了该引脚:
dump_stack();
注意:在 linux3.10 内核的 sdk 中用的是 gpio_direction_output 和gpio_direction_input 接 口 , 在 linux4.4 内 核 中 则 是 gpiod_direction_output 和gpiod_direction_input。
下面以 linux4.4 版本为例来讲解如何查看引脚:gpio4 b3。
首先,需要计算出代表 gpio4b3 的值,算法如下:
gpio4_B3 = 4 *32 + (B-A) * 8 + 3 = 3 *32 + 1 * 8 + 3 = 139
计算方法参考:《rk3568 | 瑞芯微平台GPIO引脚驱动编写》
注:在 linux4.4 内核, io 引脚的值有些变化,也就是按照上文算法计算的结 果要+1000,所以 GPIO4B3 如果是 linux4.4 内核里要填 1139。
int gpiod_direction_output(struct gpio_desc *desc, int value)
{
if (!desc || !desc->chip) {
pr_warn("%s: invalid GPIO\n", __func__);
return -EINVAL;
}
+ if ( desc_to_gpio(desc) == 1139)
+ {
+ printk("dump_stack_start\n");
+ dump_stack();
+ printk("dump_stack_end\n");
+ }
if (test_bit(FLAG_ACTIVE_LOW, &desc->flags))
value = !value;
return _gpiod_direction_output_raw(desc, value);
}
添加后编译烧录,只要对应判断的引脚有被调用,启动 log 中就会打印出堆栈,可以根据找出结果查看,找到驱动调用函数。
配置IOMUX会调用该接口,
仍然以引脚gpio4 b3为例。
[drivers/pinctrl/pinctrl-rockchip.c]
@@ -1224,6 +1224,17 @@ static int rockchip_set_mux(struct rockchip_pin_bank *bank, int pin, int mux)
dev_dbg(info->dev, "setting mux of GPIO%d-%d to %d\n",
bank->bank_num, pin, mux);
+ if((bank->bank_num == 4)&&(pin == 11)){
+ printk("6902 setting mux of GPIO%d-%d to %d\n",
+ bank->bank_num, pin, mux);
+ dump_stack();
+ }
if (bank->iomux[iomux_num].type & IOMUX_SOURCE_PMU)
regmap = info->regmap_pmu;
刚才分析,发现GPIO2 A2被SDMMC0占用,那么如何来解决这个冲突呢?
只要从设备树下手即可。
瑞芯微平台的设备树,根据平台区分,往往前缀是:
rk + 平台 + 板子型号 + ddr型号 + 版本
比如rk3568系列设计的设备树文件如下:
arch/arm64/boot/dts/rockchip/rk3568-amp.dtsi
arch/arm64/boot/dts/rockchip/rk3568-android9.dtsi
arch/arm64/boot/dts/rockchip/rk3568-android.dtsi
arch/arm64/boot/dts/rockchip/rk3568-dram-default-timing.dtsi
arch/arm64/boot/dts/rockchip/rk3568.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10-android9.dts
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtb
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10-linux.dts
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10-linux-spi-nor.dts
arch/arm64/boot/dts/rockchip/rk3568-evb2-lp4x-v10-bt1120-to-hdmi.dts
arch/arm64/boot/dts/rockchip/rk3568-evb2-lp4x-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb2-lp4x-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb4-lp3-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb5-ddr4-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb5-ddr4-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10-linux.dts
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10-rk628-bt1120-to-hdmi.dts
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10-rk628-rgb2hdmi.dts
arch/arm64/boot/dts/rockchip/rk3568-evb6-ddr3-v10-rk630-bt656-to-cvbs.dts
arch/arm64/boot/dts/rockchip/rk3568-evb7-ddr4-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb.dtsi
arch/arm64/boot/dts/rockchip/rk3568-iotest-ddr3-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-iotest-ddr3-v10-linux.dts
arch/arm64/boot/dts/rockchip/rk3568-linux.dtsi
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v10-linux.dts
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v10-linux-spi-nand.dts
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v12.dtsi
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v12-linux.dts
arch/arm64/boot/dts/rockchip/rk3568-nvr-demo-v12-linux-spi-nand.dts
arch/arm64/boot/dts/rockchip/rk3568-nvr.dtsi
arch/arm64/boot/dts/rockchip/rk3568-nvr-linux.dtsi
arch/arm64/boot/dts/rockchip/rk3568-pinctrl.dtsi
一口君的板子是evb1,ddr4,v10版本,所以去掉其他的文件,
我们只需要关注以下文件即可。
arch/arm64/boot/dts/rockchip/rk3568-android.dtsi
与安卓相关的信息
arch/arm64/boot/dts/rockchip/rk3568.dtsi
描述cpu、memory、timer、clk、sata、usb host、gic、视频控制器、sram、cru、i2c控制器、uart、pwm、pmu等各种Soc内部硬件信息
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dts
arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi
arch/arm64/boot/dts/rockchip/rk3568-evb.dtsi
与evb1底板相关的外设硬件信息
arch/arm64/boot/dts/rockchip/rk3568-pinctrl.dtsi
pinctl相关硬件信息
还有1个描述pinctl引脚驱动能力的文件:
rockchip-pinconf.dtsi
使用grep命令来查询:
grep sdmmc0 arch/arm64/boot/dts/rockchip/rk3568* -nr
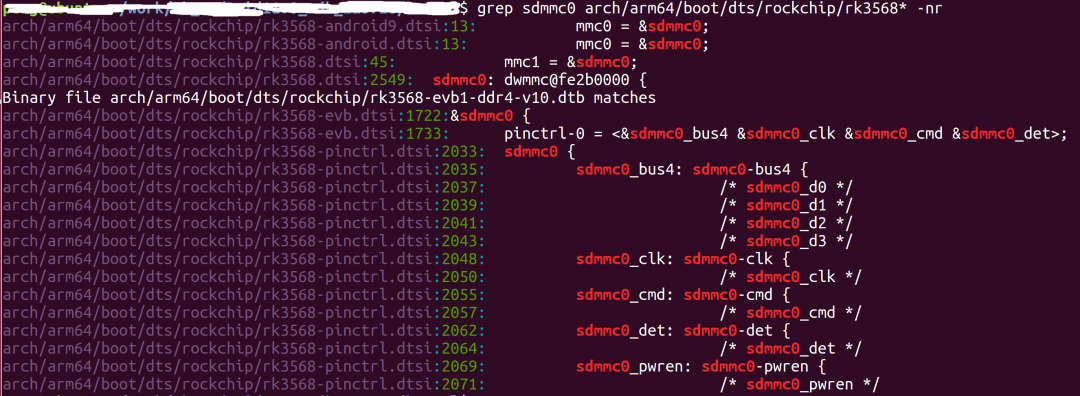
好在信息不多,逐个查看,下面这个文件,我们找到了复用的地方。
rk3568-pinctrl.dtsi
该引脚被定义为sdmmc0_clk,作为时钟被使用了。
sdmmc0 {
………………
/omit-if-no-ref/
sdmmc0_clk: sdmmc0-clk {
rockchip,pins =
/* sdmmc0_clk */
<2 RK_PA2 1 &pcfg_pull_up_drv_level_2>;
};
修改的方法有很多种:
投机取巧法 将sdmmc0_clk改成其他没有用的gpio
简单粗暴法 如果确定没有使用sdmmc0,可以将所有sdmmc0地方全部注释掉
设备树支持下面这种方法:
#if 0
#endif
找硬件工程师飞线,改用其他的GPIO
那就只能修改冲突的GPIO,
但是这种情况,往往会牵一发而动全身,
要改好几处,那就需要各位老铁细心慢慢修改了。
好了,本文到底结束。
一口君目标是写100篇瑞芯微平台的文章,
有喜欢瑞芯微的老铁,
欢迎大家关注学习。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
