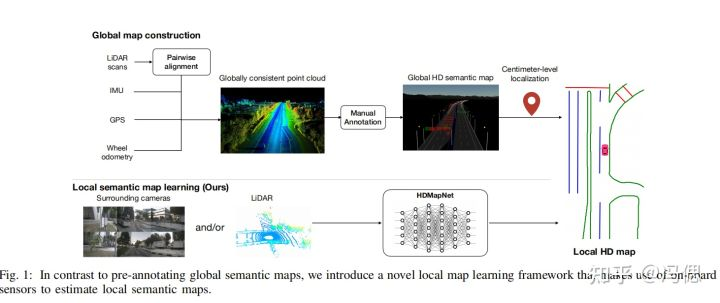
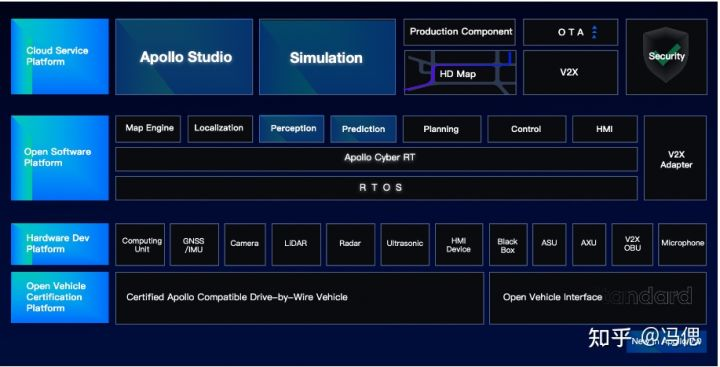
典型论文:HDMapNet: A Local Semantic Map Learning and EvaluationFramework 自动驾驶感知模块中对是否要使用激光雷达的问题分成了两派。一种是坚定的纯视觉技术路线,比如特拉斯等。还有一种是国内的多传感器数据融合路线。在没有接触到BEV之前,我是坚定的纯视觉路线的拥护者,但是在研究了一些论文后,我的观点逐步改变。传感器融合路线的机会在前融合或者中融合层面,而目前市面上的多模态数据融合方案多为后融合或者结果层面的融合。就是在生硬的融合方式下,各个传感器的缺点形成了木桶效应。 BEV的出现给多模态数据提供了一个统一尺度的可能,比如在HDMapNet论文中,主要目的是基于多模态数据采集制作低廉高效的高精地图。作者设计了多传感器的动态可插拔结构。把所有传感器的数据或特征统一到BEV视角下,这样的统一尺度理论上来说天然成立。减少传感器会影响检测的效果,但是不会影响感知系统的可使用性,是1+1>2的正向结果。
BEV带来了简洁高效的感知模块
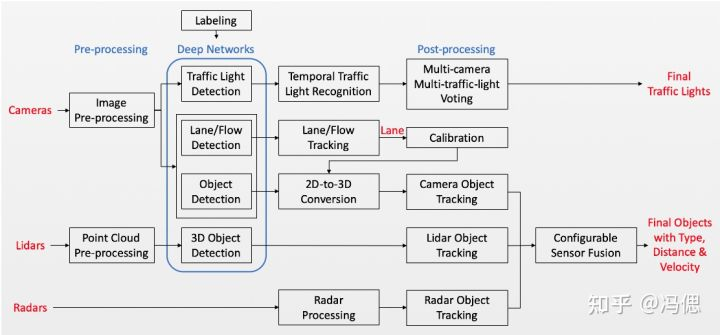
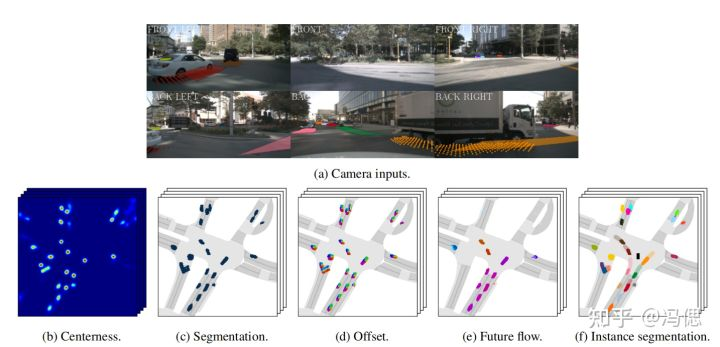
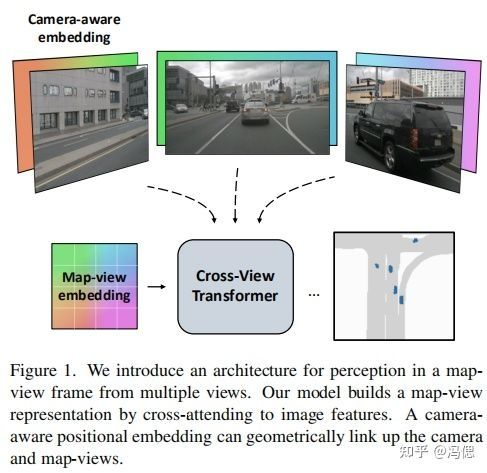
典型论文:FIERY: Future Instance Prediction in Bird’s-Eye View from Surround Monocular Cameras 现有的自动驾驶感知模块中,包含了2d/3d目标检测,语义分割,全景分割,多目标跟踪,轨迹预测等。整个感知模块是又臭又长,需要的算法开发/算法维护/模型迭代等人员数量众多。而BEV的出现,让更加简洁高效的感知模块成为可能。 fiery的论文和代码有幸研究了一段时间,结构设计的巧妙和统一任务的架构一下子打开我新世界的大门。这篇文章使用的传感器只有摄像头,也就是纯视觉方案。fiery是在lift论文的基础上进行的改进,这篇论文将多个相机数据通过神经网络进行了基于BEV的投影。在一个算法框架下实现了3d目标检测(无高度h),障碍物实例分割,车道线分割,可行驶区域分割,多目标跟踪,障碍物轨迹预测的功能。维护上述模块可能要大几十的团队,但是现在维护fiery可能十多人就够了(我离失业越来越近了,哈哈)。这篇文章的缺点是耗时太长(8fps),主要是用于未来轨迹预测的GRU网络部分,要3帧一起输入网络。
BEV促进端到端的自动驾驶框架发展
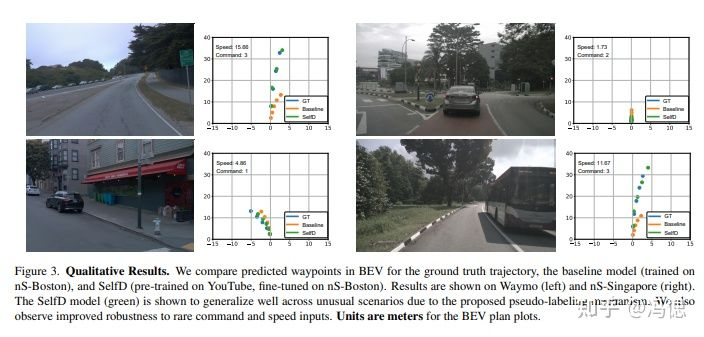
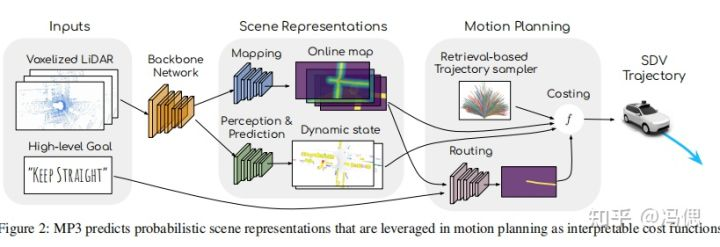
典型论文1:MP3: A Unified Model to Map, Perceive, Predict and Plan典型论文2:SelfD: Self-Learning Large-Scale Driving Policies From the Web 从apollo等开源的自动驾驶框架上看,自动驾驶技术常被分为感知模块,预测模块,规划决策模块,控制模块等。各个模块通过消息机制或者共享内存的方式进行交互,保持相对的独立。此外这样的架构虽顺应了当下的自动驾驶技术发展,但不一定就是合理的,比如强解耦造成的鲁棒性变差等问题。无论是工业界和学术界都在期盼一个端到端的自动驾驶框架的出现。 BEV下的自动驾驶技术发展很可能就是端到端的自动驾驶框架的契机。 SelfD里作者利用BEV视角统一了大量行车视频的数据尺度,并进行了规划和决策模块的模型学习。 MP3中,将地图,感知,预测和规划设计成一个统一模块,形成了一个接近端到端的自动驾驶框架。
一、SAE J1939协议概述SAE J1939协议是由美国汽车工程师协会(SAE,Society of Automotive Engineers)定义的一种用于重型车辆和工业设备中的通信协议,主要应用于车辆和设备之间的实时数据交换。J1939基于CAN(Controller Area Network)总线技术,使用29bit的扩展标识符和扩展数据帧,CAN通信速率为250Kbps,用于车载电子控制单元(ECU)之间的通信和控制。小北同学在之前也对J1939协议做过扫盲科普【科普系列】SAE J
 关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯