 关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
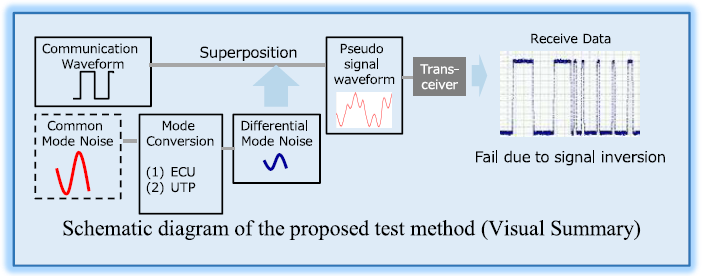
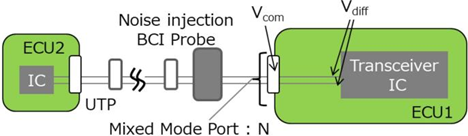
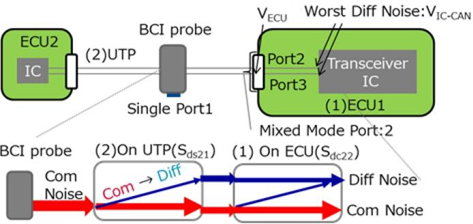
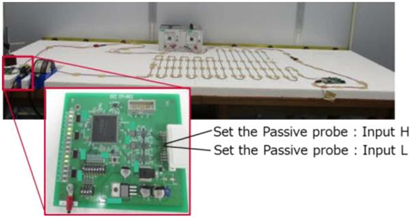
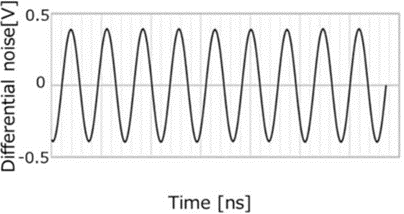
众所周知,大量的电子控制单元(ECU)和高速通信局域网(LAN)对于高级驾驶辅助系统(ADAS)来说是必要的。原始设备制造商(OEM)有兴趣在车辆上引入具有灵活数据速率的控制器区域网络(CAN-FD),因为它具有高数据速率和低数据速率的仲裁阶段。同时,确保抗干扰性能是使用差分信号的CAN-FD的主要问题之一。我们以前报道过一种方法,以100Mbps以太网ECU的Sdc11为基础,使用差分信号来定义抗扰性能的标准。我们还研究了CAN-FD的模式转换S参数的定义。在此基础上,我们提出了一种CAN-FD收发器IC的抗扰度评估方法,以用于IC的选择。最近,汽车上安装了许多ECU,由于驾驶辅助功能和电气组件的增加,ECU之间处理的数据量也增加了。CAN被广泛用作连接ECU的车内局域网标准,其中数据的传输和接收速度主要为500 kbps。然而,随着上述车载局域网上信息量的增加,罗伯特-博世新制定了CAN- FD,可以以5 Mbps的速度发送和接收数据。CAN在仲裁阶段和数据阶段使用相同的比特率。相比之下,CAN-FD可以改变数据阶段的比特率,使数据传输的最高速度为5Mbps[1],ISO标准[2]。具体来说,数据相位的信号振幅是相同的,而5 Mbps的数据相位速率是500 kbps的十倍。因此,确保抗干扰性能是CAN-FD的主要问题之一。相比之下,CAN-FD作为CAN的替代品,正在进行车内研究。预计许多汽车制造商将继承传统的CAN组件和设计政策,如通信线路和ECU设计要求。为了确保这一点,有必要确定收发器IC的抗扰度性能。因此,我们认为有必要事先估计一下收发器IC的抗干扰性能,并选择一个可以安装在车上的收发器IC。过去已有多项研究报道了以太网系统或差分通信系统的抗扰性能与100Base-T1[3]、1000Base-T1[4]和仿真分析[5]的模式转换混合模s参数(Sdc)之间的关系。在此基础上,提出了一种定义Sdc11100mbps以太网[6]和1gbps以太网ECU[7]抗扰性能标准的方法。我们确认了批量电流注入(BCI)测试结果与Sdc11值之间的关系,其中BCI测试是车辆设备[8]的抗扰度测试之一。由于CAN-FD已经被指定为继承传统设计要求中的Sdc11,到达收发器IC端的波形预计将根据BCI测试期间到达ECU端的噪声来估计。以往关于BCI测试建模的研究通常基于三维电磁场模拟[9]、等效电路模型(部分与实测模型相结合)[10]或实测模型[11]。被测目标设备通常与BCI测试环境分开建模,作为电路模型或阻抗模型。此外,这些研究还采用了单端特性进行建模。在这项研究中,我们将目标限定为CAN-FD差分通信。这使我们能够将模式转换s参数的概念应用于噪声传播分析,并专注于到达收发端最坏的差分噪声。此外,通过将目标频率限制在CAN-FD的抗扰度性能恶化的频段,可以使用经验知识进行有效分析。这项研究的目的是建立一种评估收发器IC的抗干扰性能的方法,并将其作为一种IC选择方法。作为一个标准,它应该能够估计实际收发器IC在BCI测试中的误差。在BCI测试中,共模噪声被应用于非屏蔽双绞线(UTP)电缆。然后,根据通信路径的不平衡程度,将其转换为差分噪声。我们提出了一种使用100 Mbps和1 Gbps ECU的SdcNN定义抗扰性能标准的方法(图1),其中我们定义了以dB符号表示的标准方程:Vcom: 通过BCI测试施加到ECU的最大共模噪声水平[V]。Vdiff: 收发器可接受的差分噪声的阈值水平[V]。到达收发器IC的差分噪声是造成误差的主要原因。因此,有必要选择一个能够承受BCI测试中产生的最差差分噪声的收发器IC。视觉摘要(在第1页)显示了所提出的IC选择方法的原理图。在这项研究中,我们重点关注在OEM测试条件下CAN-FD的高错误率的10-16MHz。通过使用通信路径的模式转换S参数对BCI测试期间到达ECU端的共模噪声的影响来量化到达收发器IC端的最差差分噪声(图2),下一节将详细解释。接下来,通过将得出的最差差分噪声叠加到通信信号上,产生一个伪信号波形。伪信号通过信号发生器直接作用于收发器IC。然后,根据输出波形中是否存在错误,来估计BCI测试的通过或失败。在这些频率中,位宽有时会因噪声而波动,高(H)或低(L)被误判。在我们的研究中,我们把错误的原因限制在这种位宽波动上。本节介绍了最差差分噪声VIC-CAN的推导和验证。到达CAN-FD收发器端的差分噪声VIC-CAN被认为是由ECU中的模式转换产生的差分噪声VIC和由通信线路(UTP)上的模式转换产生的差分噪声VUTP之和,具体如下:VIC: ECU上模式转换的电压:VECU * Sdc22[V] @10-16 MHz。VUTP: 来自UTP上模式转换的电压:VECU* Sdc21[V]@10-16MHz。为了计算由ECU中的模式转换产生并到达收发器IC终端的差分噪声VIC,在BCI测试期间在ECU端测量VECU(图3)。分析频率被设定为10到16MHz,在这个频率下,CAN- FD的抗干扰性能会恶化,达到的共模噪声会超过监测电流。一个使用VIC= VECU*Sdc22的VIC计算结果的例子显示(图4),其中ECU的Sdc22被设定为40dB。根据传统的CAN ECU规范,Sdc被选择为40dB。图4. VIC的例子(在BCI测试期间12MHz的噪音)。
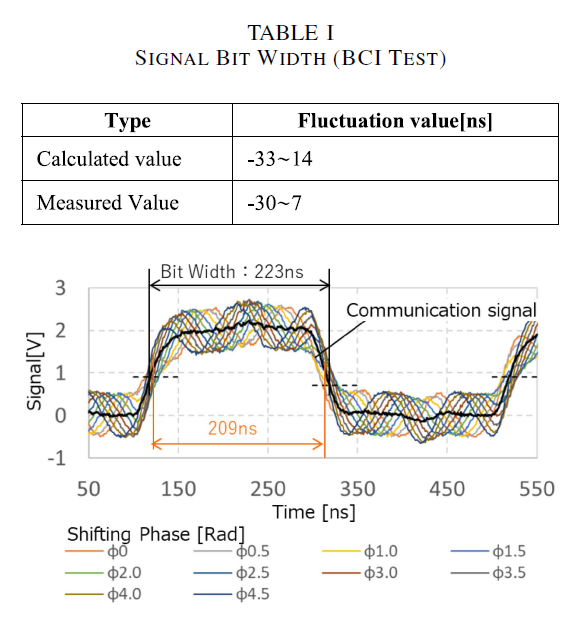
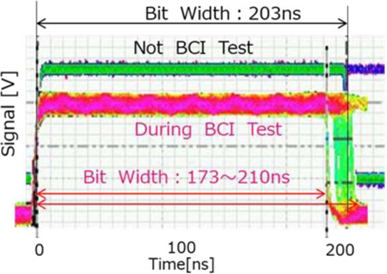
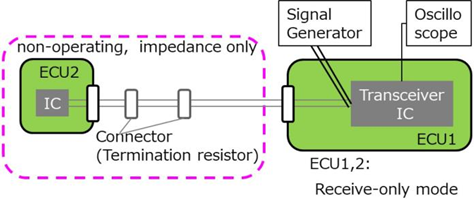
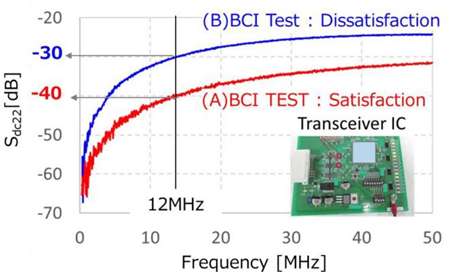
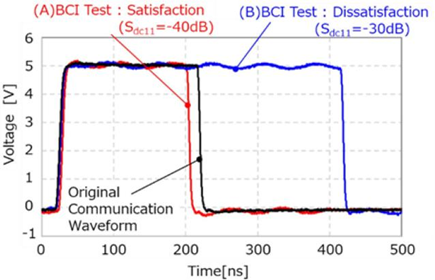
据估计,在10到16MHz时,最大约0.4V的差分噪声已经到达。接下来,由通信线路的模式转换产生的差分噪声VUTP被导出。根据原始设备制造商设定的ECU的Sdc测量频段,它被测量到50MHz。构建BCI测试环境是为了测量从BCI探头通过通信线路到达ECU端的信号的模式转换Sdc21(图5和6)。由于VECU的最大值在12MHz时为120V,通过乘以12MHz时61dB的Sdc21,得到VUTP为0.1V。因此,VUTP的最差值被设定为0.1V,并在本研究中应用于10-16MHz的其他频率。从上述情况来看,到达收发端的差分噪声VIC-CAN在12MHz时被计算为约0.5V。因为在BCI测试中很难测量到达收发器IC端的差分噪声,因为通信差分信号是叠加的。因此,我们把重点放在通信信号的位宽因差分噪声而变化的事实上,并从位宽的波动量验证了差分噪声计算的有效性。即加噪声时,主隐性判断位置发生变化,信号波形的位宽发生变化,因此以波动量作为指标。先前计算的VIC-CAN(12MHz时为0.5V)被用作最差的差分噪声。为了看到连续变化的相位的最大值,通过以足够小的0.1rad步长进行移位来检查。在信号波形上叠加VIC CAN,并以0.1rad的步长移动相位,信号波形的最大波动量为33ns(表I,图7)。这种波动直接影响到收发电路中的比特提取。图8. 在收发器输出(RXD)进行BCI测试期间的位宽波动测量值。在BCI测试期间测量接收数据(RXD)波形的结果是,信号波形的最大波动量为30ns(表I,图8)。在这里,比特波动由接收信号主导,但信号幅度相对稳定,因为它是由RXD输出电路控制的。由于证实了计算出的信号波形的最大波动量与实际测量的波动量几乎相同,因此得出结论,12MHz的VIC CAN可以在上一节中被适当估计。由于上一节中计算的VIC CAN是到达收发器IC端的差分噪声,在BCI测试期间输入到收发器IC的信号可以通过将VIC CAN叠加到通信信号上进行模拟。伪信号波形的输入系统和输出波形的测量系统如图所示(图9)。伪信号从信号发生器直接施加到安装在评估板上的收发器IC的CAN-H和CAN-L终端。然后,用示波器测量输出,以获得其波形。由于只有一种类型的样品IC(来自合作的半导体制造商的原型)可用,因此准备了以下两种类型的伪信号波形,并用于验证测试方法。我们准备了两块具有不同Sdc22值的板子,即40分贝和30分贝,并安装了收发器IC以进行BCI测试(图10)。我们确认,BCI测试结果的通过或失败在两个板子中是不同的。结果显示在图11中。波形(A)相当于原始波形,没有发生错误,而波形(B)会导致位反转,可以估计出一个通信错误。从这一结果中,我们可以确认使用应用于收发器IC的伪信号波形对BCI测试的通过或失败进行估计。
提出了一种CAN-FD收发器的IC选择方法,利用混合模式的S参数来估计UTP和ECU上的模式转换,来定义抗干扰性能的最差差分噪声。在BCI测试期间到达收发器IC的最差差分噪声被叠加在信号波形上,以获得一个用于评估IC输出信号的伪信号。通过比较其在IC输出信号终端的位宽波动与具有实际通信错误的BCI测试中的位宽波动,验证了最差的差分噪声水平。最后,通过与实际BCI测试的结果进行比较,我们确认使用该方法可以估计BCI测试的通过或失败,只需将伪信号直接应用于收发器IC,而无需使用BCI测试环境。关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯