

摘要:一个Linux人脸识别小项目,可以拿过来来练练手。使用RV1126核心板通过瑞芯微API进行视频采集并进行人脸识别,并输出到设备上。

网络文件系统NFS,是由SUN公司研制的UNIX表示层协议,能使使用者访问网络上别处的文件就像在使用自己的计算机一样。我们可以Ubuntu上制作板子需要的文件,然后使用NFS来加载文件到板子的DDR上。
因为我们使用的板子内存太小,而人脸识别有需要很多的文件来支持,板子放不下,只能通过这种挂载的方式,将程序运行所需要的数据库模型文件放在挂载的目录下,这样就可以了。
在Ubuntu终端执行以下指令安装NFS。
sudo apt-get install nfs-kernel-server
新建NFS共享目录,并给予NFS目录可读可写可执行权限。
sudo mkdir /home/zhiguoxin/linux/nfs
sudo chmod 777 /home/zhiguoxin/linux/nfs/
执行以下指令打开etc/exports文件
sudo vi /etc/exports
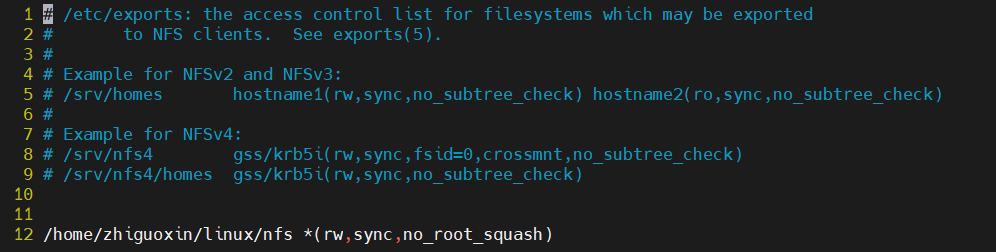
进入etc/exports文件,在最后添加如下内容
/home/zhiguoxin/linux/nfs *(rw,sync,no_root_squash)
/home/zhiguoxin/linux/nfs 表示NFS共享的目录,*表示允许所有的网络段访问,rw表示访问者具有可读写权限,sync表示将缓存写入设备中,可以说是同步缓存的意思。no_root_squash表示访问者具有root权限。修改完如下图所示。
修改完以后保存退出。执行以下指令重启 NFS 服务器。
sudo /etc/init.d/nfs-kernel-server restart
执行以下指令查看 NFS 共享目录。
showmount -e

确保网络环境正常,Ubuntu、Windows和开发板能相互ping 通。开发板IP:192.168.100.75 虚拟机IP:192.168.100.100 电脑网口IP:192.168.100.102
源码可以周期官网下载,放在我的共享文件夹下,然后解压。
这个RV1126的源码包在购买板子的时候商家会送你的
这个那文件夹里面有交叉编译工具链。在交叉编译之前,得在sdk里面找到交叉编译工具链:

然后我这里放在samba共享目录下,我的共享文件夹对应我的ubuntu的目录是
/home/zhiguyoxin/shared/
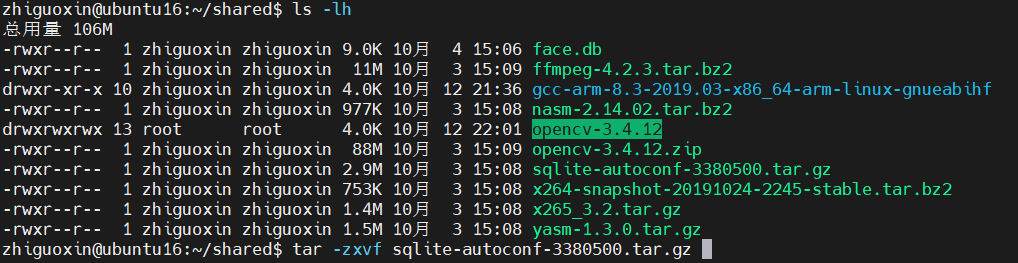
现在开始来交叉编译SQLite3,这个SQLite3的源码还是用之前给大家的源码包:
使用命令解压
tar -zxvf sqlite-autoconf-3380500.tar.gz
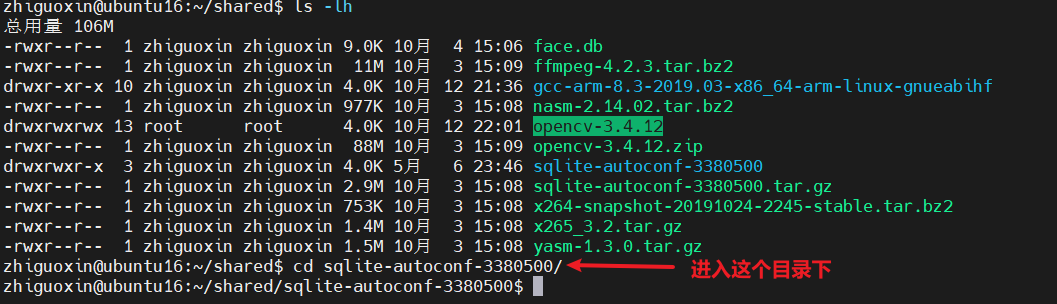
然后开始进行交叉编译,不过在在这之前,先在当前目录下创建一个文件夹来存放等下交叉编译出来文件:
mkdir arm_sqlite3_install

最后最为关键部分是,现在找到那个之前交叉编译的路径来,也就是结对路径:
/home/zhiguoxin/shared/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf/bin
接着刚才建立的arm_sqlite3_install,也是要找到他的绝对路径来:
/home/zhiguoxin/shared/sqlite-autoconf-3380500/arm_sqlite3_install

最后就可以按照下面这个命令来执行编译了:
./configure CC=/home/zhiguoxin/shared/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc --host=arm-linux --prefix=/home/zhiguoxin/shared/sqlite-autoconf-3380500/arm_sqlite3_install

然后执行分别执行以下命令即可:
make -j8
make install
最后在arm_sqlite3_install目录下生成四个文件:

进入到arm_sqlite_install目录下的lib目录,这里面就是交叉编译出来的.so的动态库文件,如下图所示:

我们把这些动态库进行一个打包:
zip -r arm_sqlite3_lib.zip *so*

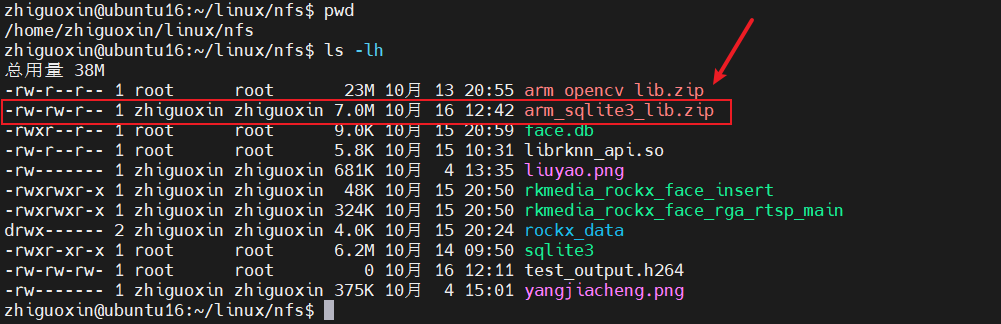
把这个打包文件拷贝到nfs目录下去:
cp -rf arm_sqlite3_lib.zip /home/zhiguoxin/linux/nfs

令外还要将sqlite3可执行文件拷贝至/home/zhiguoxin/linux/nfs目录下

使用这个可执行文件我们查看数据库中的数据,做一下添加删除的操作。
同样现在官网下载号源码包,放再共享文件夹下

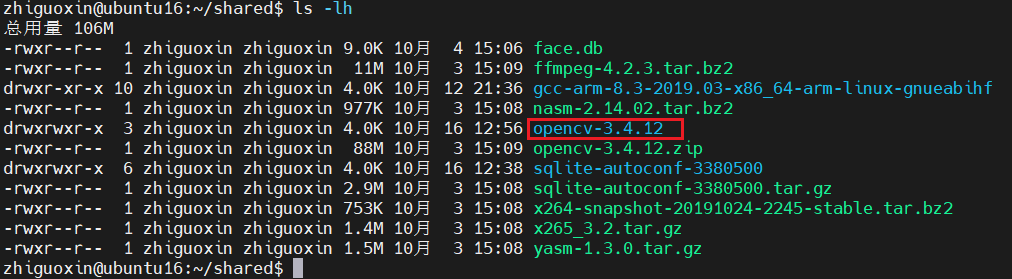
解压
unzip opencv-3.4.12.zip -d opencv-3.4.12
进入解压后的opencv版本platforms/linux目录下去:
cd opencv-3.4.12/platforms/linux
修改arm-gnueabi.toolchain.cmake
vim arm-gnueabi.toolchain.cmake
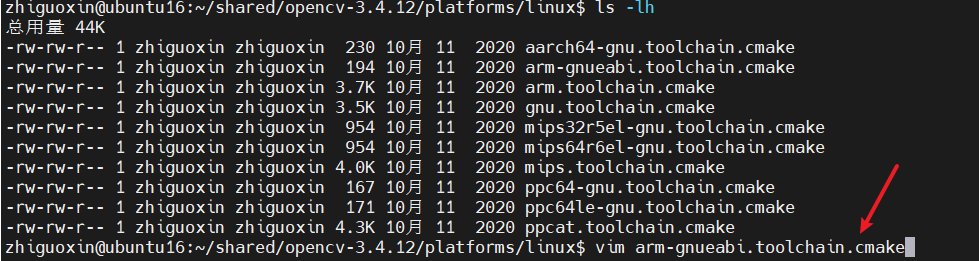
将里面的交叉编译路径修改成你自己的路径
/home/zhiguoxin/shared/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf/bin/arm-linux-gnueabihf

建立一个build目录,并进入build下去:

编译:
cmake -DCMKAE_BUILD_TYPE=Release -DCMAKE_TOOLCHAIN_FILE=../platforms/linux/arm-gnueabi.toolchain.cmake -DCMAKE_INSTALL_PREFIX=/opt/arm_opencv -DSOFTFP=ON -DENABLE_PROFILING=OFF -DWITH_OPENCL=OFF -DWITH_TBB=ON -DWITH_V4L=ON -DHAVE_CAMV4L2=ON -DBUILD_TESTS=OFF -DINSTALL_PYTHON_EXAMPLES=OFF -DBUILD_EXAMPLES=OFF -DWITH_FFMPEG=ON -DHAVE_FFMPEG=ON -DBUILD_opencv_js=OFF -DENABLE_NEON=OFF -DENABLE_VFPV3=OFF ../

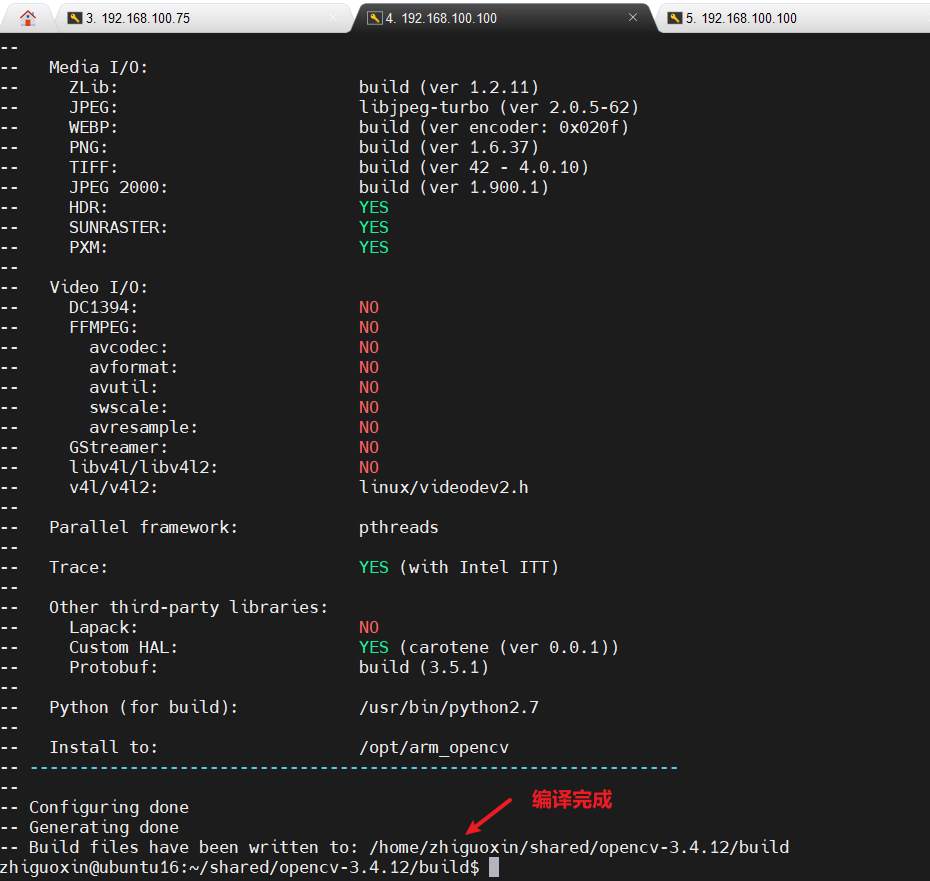
然后执行下面两句
make -j8
make install
最后结果:

先进入到build目录下的lib目录下,你会看到很多动态库,

对其打包:
zip -r arm_opencv_lib.zip lib*

将文件拷贝至/home/zhiguoxin/linux/nfs//共享文件夹
cp -rf arm_opencv_lib.zip /home/zhiguoxin/linux/nfs/

把sdk里面的rknn动态库移植到nfs目录下,这是我放sdk的路径:

将这个文件拷贝到/home/zhiguoxin/linux/nfs目录下,用啥方式都可以,只要拷贝过去就可以了。
首先下载人脸识别源码,我下载后之后放在这里
在编译之前,我们要修改一下Makefile:
vim Makefile
这里修改成你的sdk交叉编译工具链的路径
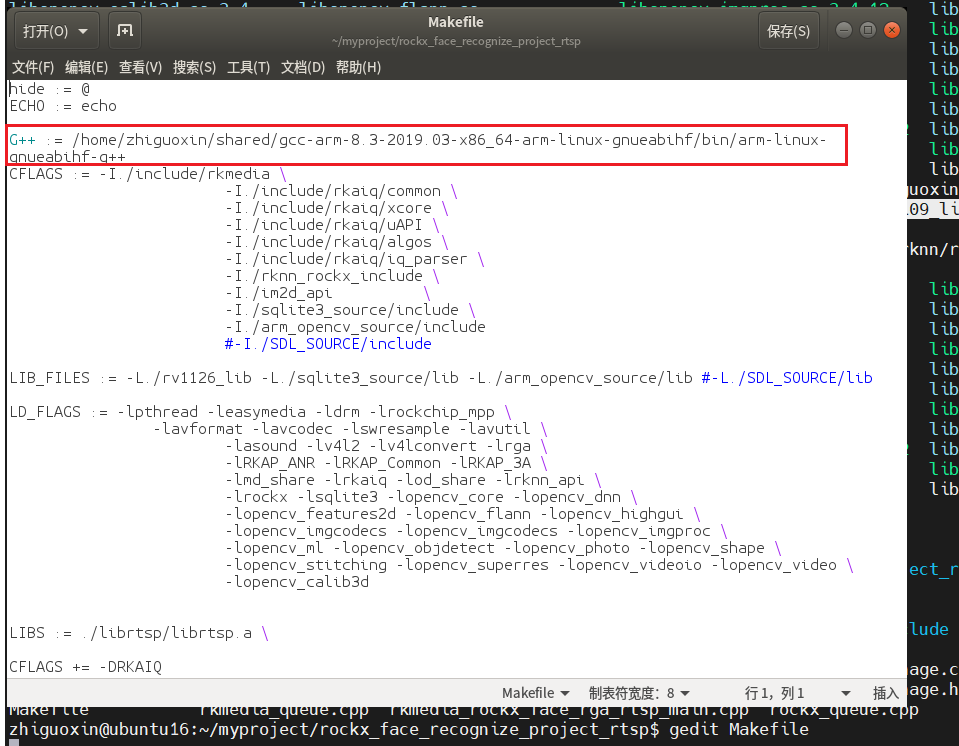
然后make就看可以了
make
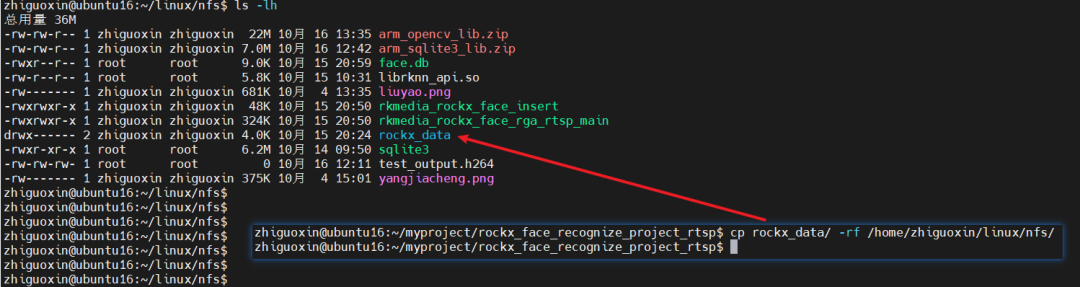
将人脸识别数据模型拷贝至/home/zhiguoxin/linux/nfs/
cd /home/zhiguoxin/myproject/rockx_face_recognize_project_rtsp
cp rockx_data/ -rf /home/zhiguoxin/linux/nfs/
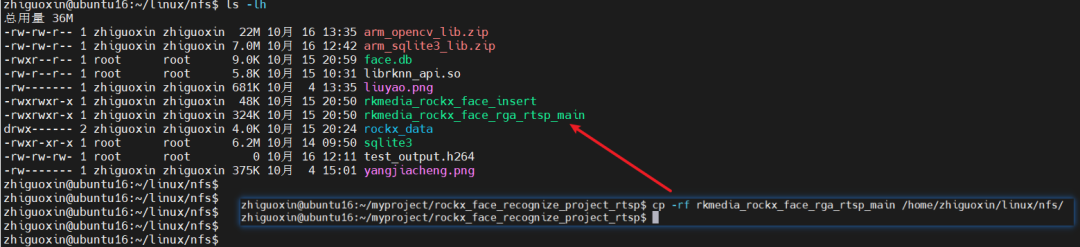
将人脸识别编译出来的可执行程序拷贝至/home/zhiguoxin/linux/nfs/
将人脸识别编译出来的插入人脸数据库可执行程序拷贝至/home/zhiguoxin/linux/nfs/

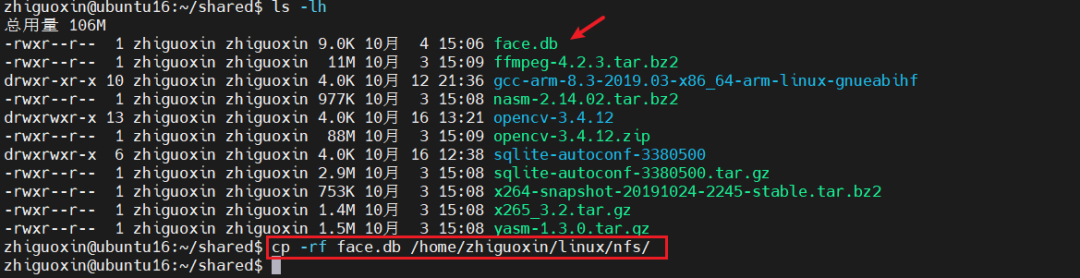
将数据库文件face.db文件拷贝至/home/zhiguoxin/linux/nfs/
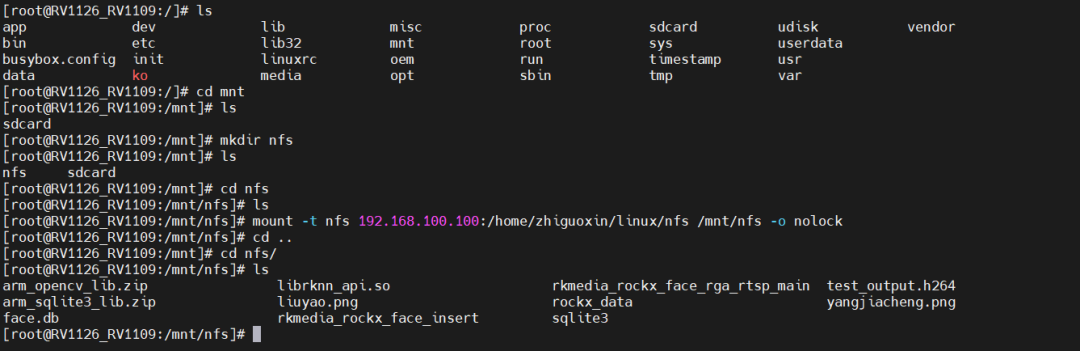
在开发板的/mnt/新建一个nfs文件夹
cd /mnt/
mkdir nfs
在板子上使用nfs挂载,之后在ubuntu上的/home/zhiguoxin/linux/nfs放的文件,都会在共享在板子的/mnt/nfs目录下
mount -t nfs 192.168.100.100:/home/zhiguoxin/linux/nfs /mnt/nfs -o nolock
./sqlite3 face.db
.tables
select *from face_data_table;
delete from face_data_table;
.quit
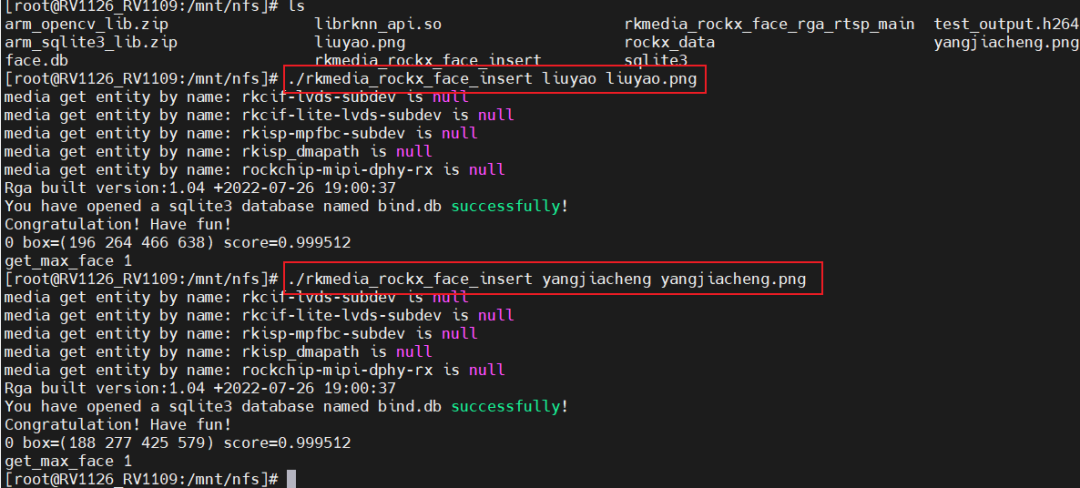
./rkmedia_rockx_face_insert liuyao liuyao.png
./rkmedia_rockx_face_insert yangjiacheng yangjiacheng.png
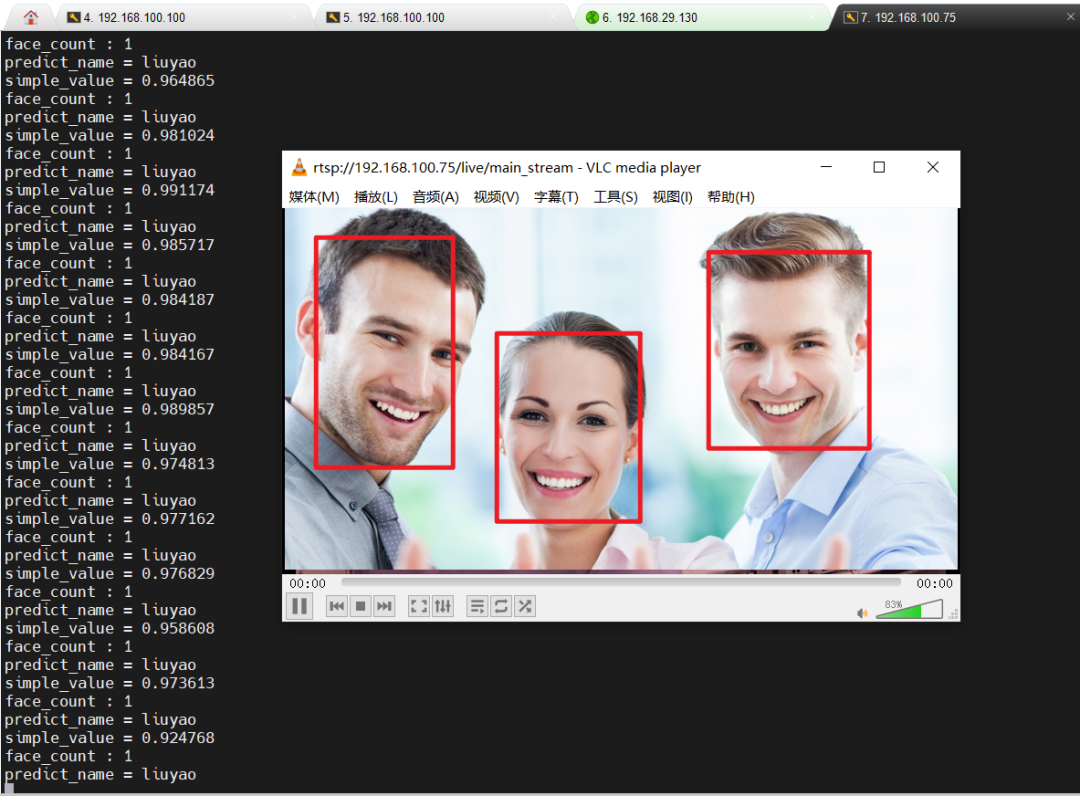
./rkmedia_rockx_face_rga_rtsp_main

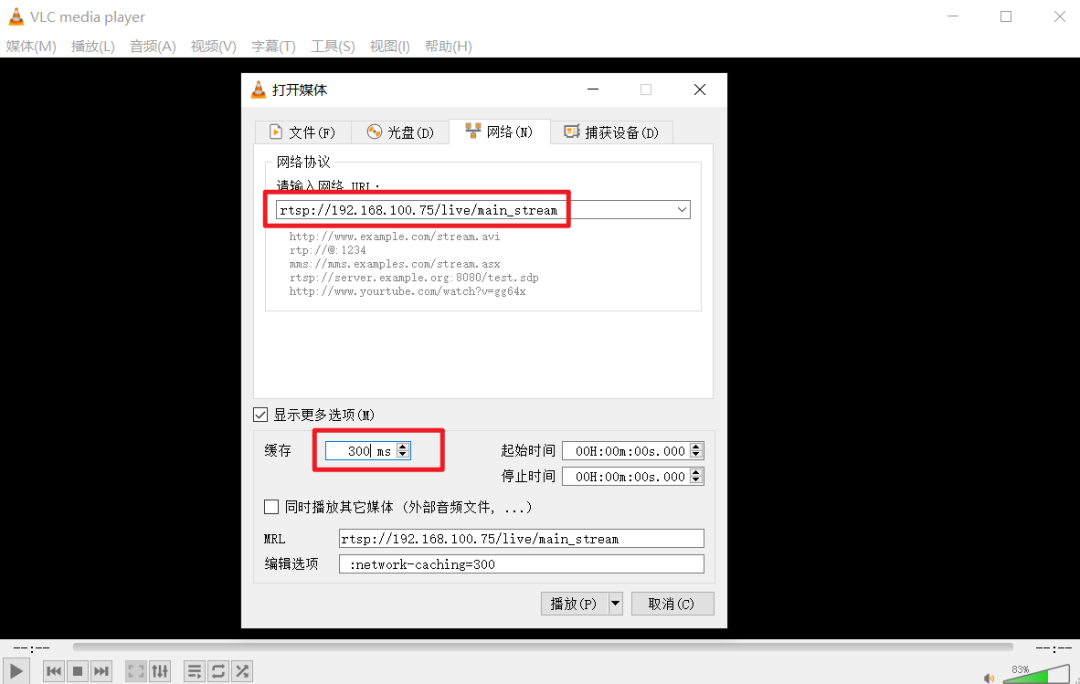
ffplay –x 800 –y 400 rtsp://192.168.100.75/live/main_stream
或者使用vlc拉流
推荐阅读


添加微信回复“进群”
拉你进技术交流群!
国产芯|汽车电子|物联网|新能源|电源|工业|嵌入式…..



