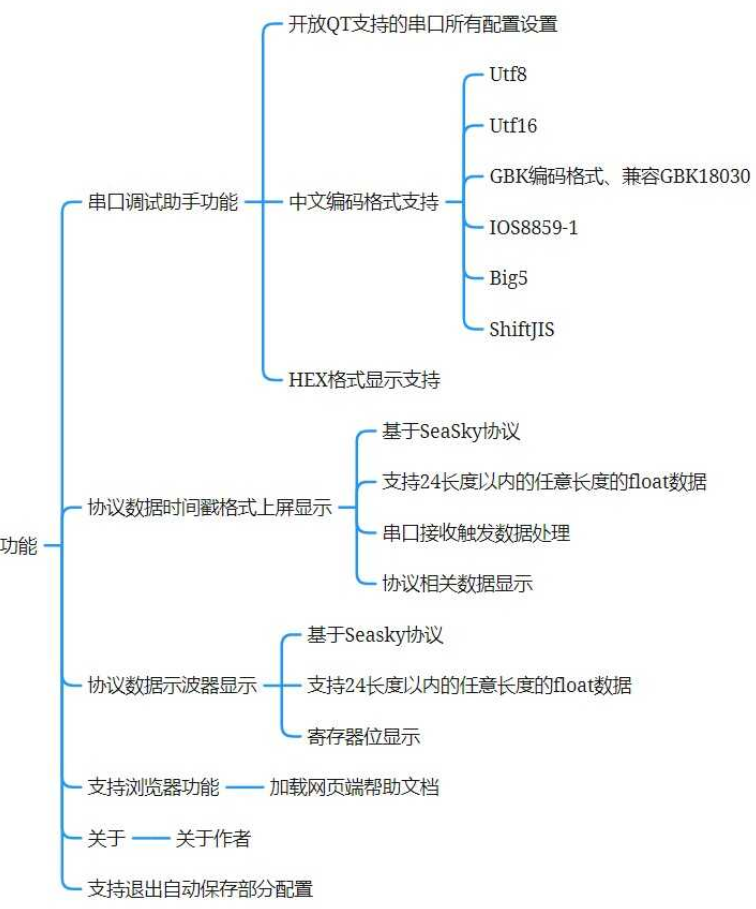
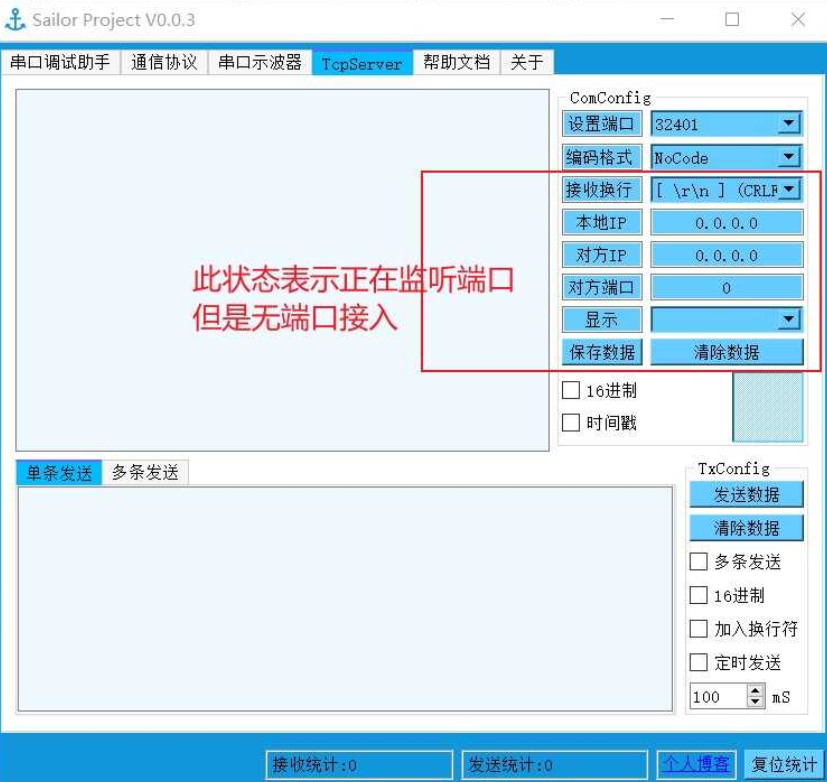
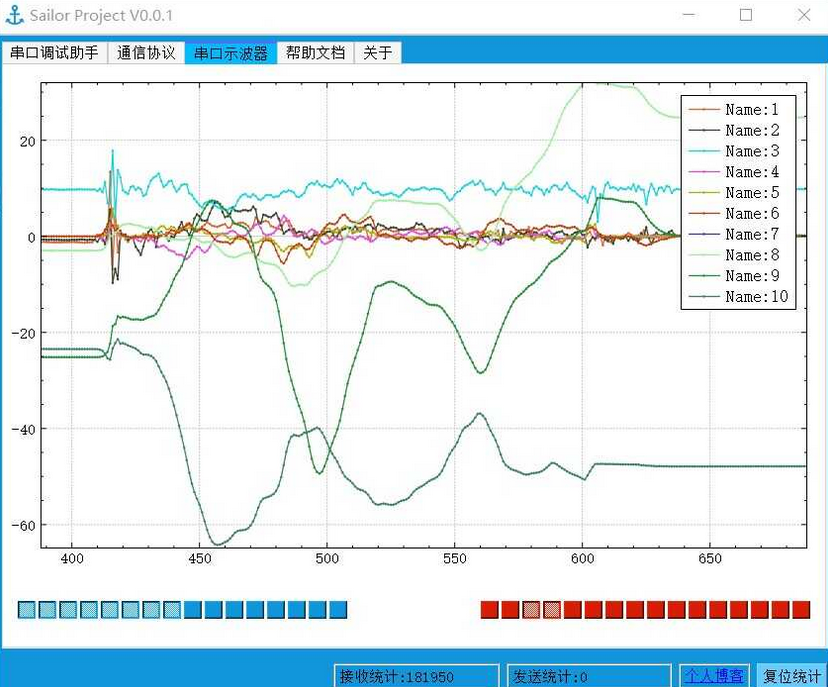
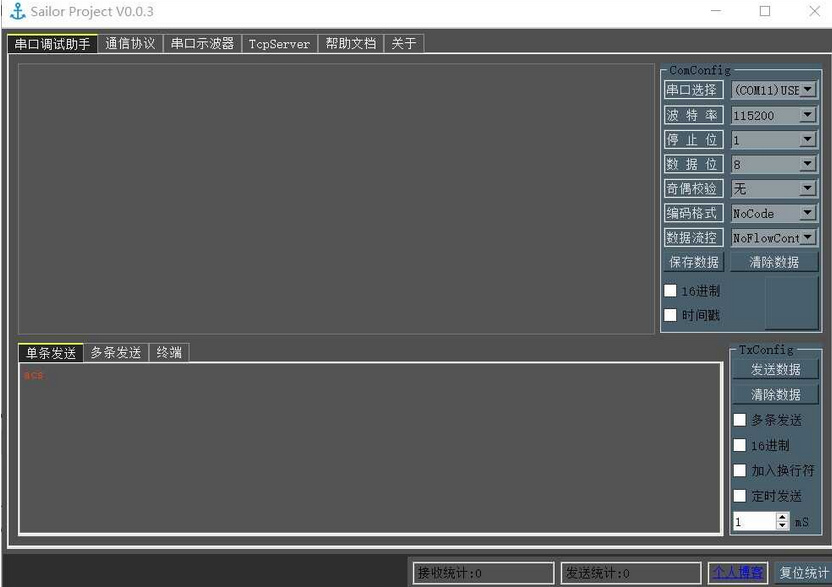
逛github时看到这个QT的串口示波器,完全开源,支持串口、TCP、波形显示、通信协议。感觉很不错,跟以前分享的那个vofa+有点像。感兴趣的可以下载下来学习学习(文末附链接)。
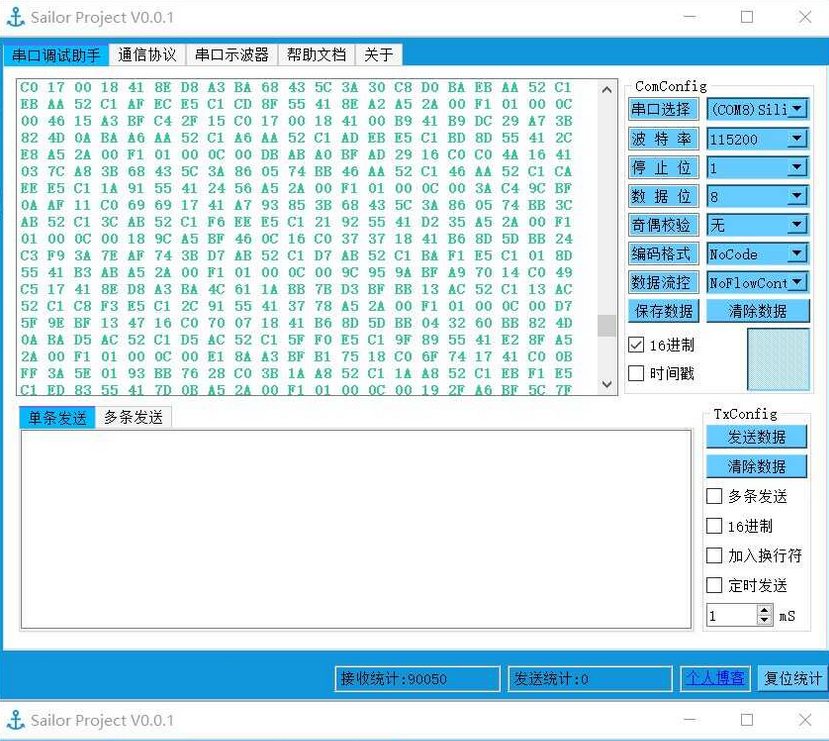
注意由于QT自带文本显示窗口加载大量数据后会造成软件卡顿,现解决方案为设定一个显示缓冲区,在有刷新数据阶段(即串口接收数据阶段),如果需要保持刷新状态(即实时显示接收得数据),则仅显示显示缓冲区的内容,你可以使用鼠标移动向上滚动条,停止数据刷新,同时当你向上移动滚动条到一定程度,便会开始加载所有数据,如果你想再次触发实时刷新数据状态,只需要将滚动条移动到最低端,并确保有数据接收。
由于保存数据为显示界面的数据,如果出于刷新状态,则无法保存所有数据,正确的做法是关闭串口后,将滚动条移动到最顶端,加载全部数据,然后保存窗口数据。

通信方式是串口,配置为波特率115200, 8位数据位, 1位停止位, 无硬件流控, 无校验位。
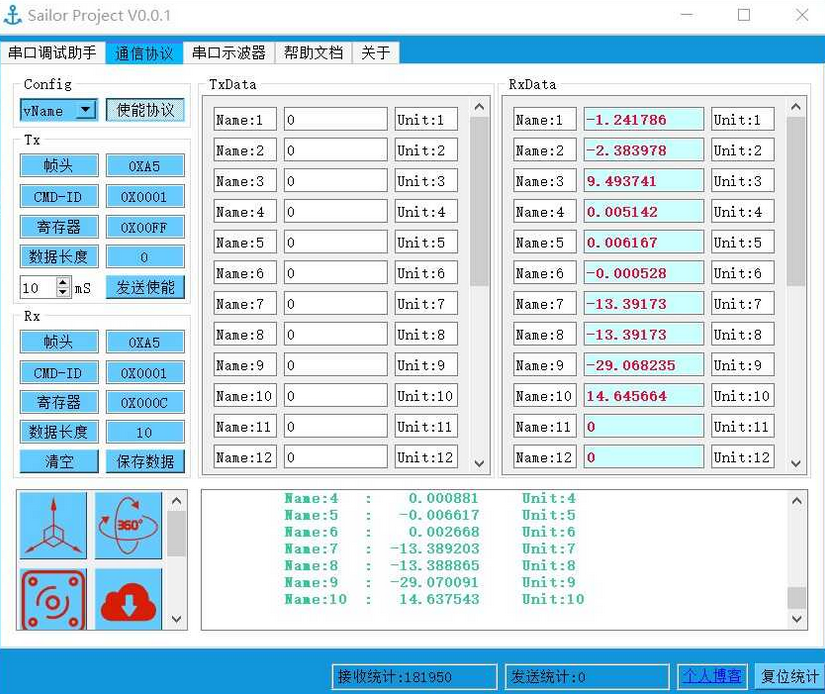
1、通信协议格式
| 帧头 | 设备类型 | 设备ID | 数据ID | 帧尾 |
|---|---|---|---|---|
| protocol_header(4-byte) | equipment_type(2-byte) | equipment_id (2-byte) | data_id(2-byte) | frame_tail(2-byte,CRC16,整包校验) |
2、帧头详细定义

3、串口通信协议
int parse_protocol(protocol_struct* pProtocol,uint16_t parseDataLen)
{
//解析数据,使用前需提前缓冲 pProtocol->message_st.pData
int ret = -1;
uint16_t pos_offset;
frame_struct* pFrameStruct = &pProtocol->frame_st;
message_struct* pMessageStruct = &pProtocol->message_st;
if (check_protocol_heade(pMessageStruct->pData) == PROTOCOL_RESULT_OK)
{
//更新帧头数据
pFrameStruct->header.sof = pMessageStruct->pData[0];
//获取data段的数据长度
pFrameStruct->header.data_length = (pMessageStruct->pData[2] << 8) | (pMessageStruct->pData[1]);
pFrameStruct->header.crc_check = pMessageStruct->pData[3];
//获取此次数据包长度
pMessageStruct->data_len = pFrameStruct->header.data_length + PROTOCOL_DATA_OFFSET + 2;
//计算解析后得到的 data_union 数据长度
pFrameStruct->frame_user.cmd_data.data_len = (pFrameStruct->header.data_length) / sizeof(data_union);
if(pMessageStruct->data_len<=parseDataLen)
{
if (pMessageStruct->data_len <= pMessageStruct->max_data_len)
{
if(CRC16_Check_Sum(&pMessageStruct->pData[0], pMessageStruct->data_len) != 0)
{
pFrameStruct->frame_user.equipment_type = (pMessageStruct->pData[5]<<8) | (pMessageStruct->pData[4]);
pFrameStruct->frame_user.equipment_id = (pMessageStruct->pData[7] << 8) | (pMessageStruct->pData[6]);
pFrameStruct->frame_user.data_id = (pMessageStruct->pData[9] << 8) | (pMessageStruct->pData[8]);
//拷贝 data段 指定长度数据
ret = (int)memcpy(&pFrameStruct->frame_user.cmd_data.pData[0], &pMessageStruct->pData[PROTOCOL_DATA_OFFSET], pFrameStruct->header.data_length);
pos_offset = pFrameStruct->header.data_length + PROTOCOL_DATA_OFFSET;
pFrameStruct->frame_tail = (pMessageStruct->pData[pos_offset+1] << 8) | (pMessageStruct->pData[pos_offset]);
return PROTOCOL_RESULT_OK;
}
else
{
//待解析BUFF超过预定解析数据容量,避免内存越界
PROTOCOL_ERROR_PRINTF("parse_protocol->>CRC16_Check_Sum err!\n");
return PROTOCOL_RESULT_CHECK_FRAME_ERR;
}
}
else
{
//待解析BUFF超过预定解析数据容量,避免内存越界
PROTOCOL_ERROR_PRINTF("parse_protocol->>data_len[%d] > max_data_len[%d]!\n",
pMessageStruct->data_len,
pMessageStruct->max_data_len);
return PROTOCOL_RESULT_OUT_OF_LEN;
}
}
else
{
//通过包头计算,还未收到完整的数据包
// PROTOCOL_ERROR_PRINTF("parse_protocol->>data_len[%d] > max_data_len[%d]!\n",
// pMessageStruct->data_len,
// pMessageStruct->max_data_len);
return PROTOCOL_RESULT_OUT_OF_LEN;
}
}
else
{
//待解析BUFF超过预定解析数据容量,避免内存越界
PROTOCOL_ERROR_PRINTF("parse_protocol->>check_protocol_heade err!\n");
return PROTOCOL_RESULT_CHECK_HEAD_ERR;
}
PROTOCOL_DEBUG_PRINTF("parse_protocol->>check_protocol_heade ok!\n");
return PROTOCOL_RESULT_ERR;
}
项目开源地址:
https://github.com/SEASKY-Master/vSailorProject
欧姆定理是如何被提出的?

为什么电路里要摆这两个电容?

画好一张规范的原理图,这些点你可要注意了!
