

第十八届全国大学生智能汽车竞赛将于2023年暑期举行, 竞速比赛规则[1] 已于2022年11月公布。竞速比赛分为10个赛题组,其中“智能视觉组”、“完全模型组”两个组别具有更加复杂的机器视觉处理和模型车运动控制任务,比赛详细内容将会另行通过比赛细则进行说明。本文是智能视觉组比赛细则。比赛细则正式文档将会公布在全国大学生智能车竞赛网站。
在 智能车竞赛竞赛比赛规则[1] 中对于智能视觉组比赛任务有了初步的描述。摘抄如下:
H/M车模。NXP公司的单片机与视觉模块OpenART mini。CCD,光电管等。5m×7m场地。场地边线用5cm左右的黄色胶带标记,场地内分区域随机摆放农作物图片目标板,图片目标板位置分已知和未知两部分; 与第十七届的智能视觉组比赛环境类似,比赛场地部署在室内无阳光直射的场地,地面保持基本平整。场地周围50厘米范围内没有其他障碍物。比赛场地外可以设置高度超过50厘米的围挡,以防止竞赛车模冲出赛场。
比赛场地形状为矩形,边长在5米至7米的范围内。场地内铺设有普通蓝色广告布,与普通赛道组背景材质一致。赛场边界用黄色封箱胶带或黄色布基胶带进行固定并标示场地位置。
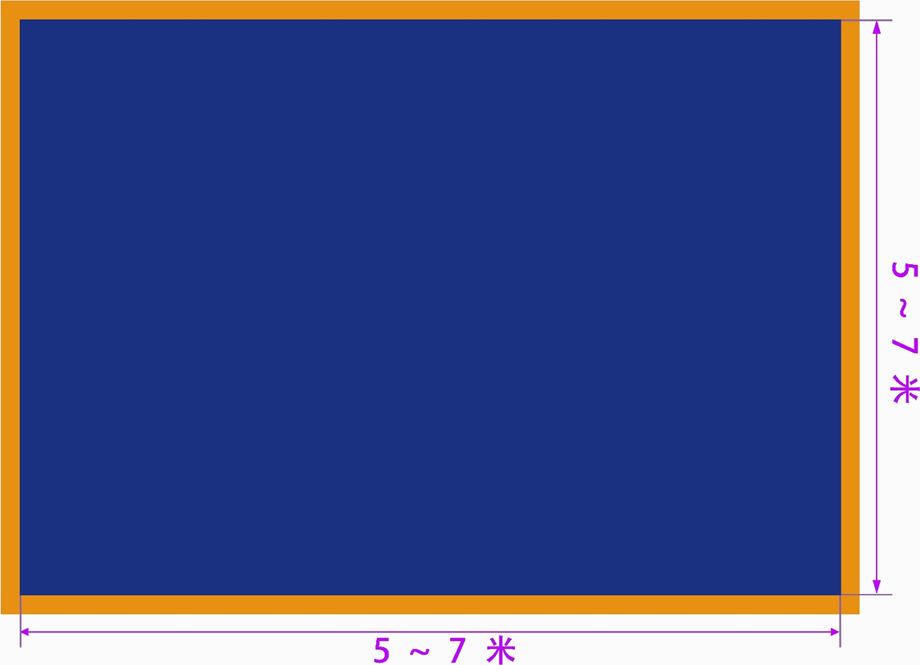
▲ 图2.1.1 比赛场地尺寸图为了便于智能车找到目标以及在完成任务过程中对于行驶路径进行优化,比赛前将会把场地内摆放的部分目标板的位置通过图片识别的方式告知智能车,同时还存在随机区域,该区域的图片是随机摆放的,不会告知确切坐标,需要小车自行在场地内完成目标检测搜索并完成识别,为了表示车模以及目标物在场地内的位置,对比赛场地建立相应平面坐标系。
从场地内左下角开始,往右、往上设置两个相互垂直坐标轴:X方向坐标轴和Y方向坐标轴。以20厘米间隔作为长度的标准单位。
场地内存在着边长为20厘米的虚拟坐标网格,目标与车模在场地内的坐标就以其中心所在网格对应的坐标(Xn,Yn)来表示。场地内靠近原点的第一个网格坐标为(1,1)。
小车从车库出发,比赛完成后自行回到车库,车库位于原点位置X轴下方,车库尺寸为65cm×45cm。
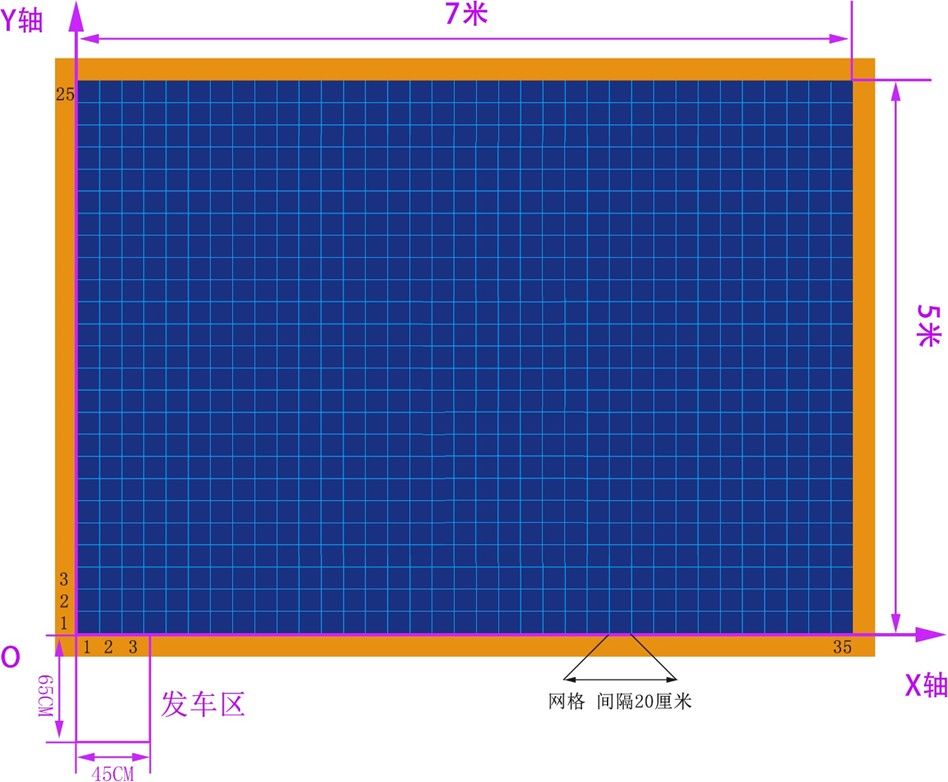
▲ 图2.1.2 比赛场地坐标示意图OpenART mini视觉模块运行目标检测模型来对目标图片进行检测和识别。 智能视觉组的基本比赛任务为:从车库出发,完成对场地内 12 ~30个目标的搜索、识别与搬运。比赛完成任务的时间,时间短者胜利。比赛计时从车模自车库出发触发计时器进入场地到车模回到出发区为止,车模完成任务后没有回到车库或有两个及以上的车轮冲出车库,均算作入库失败,加罚 15 秒。每一个搬运失败、搜索遗漏或搬运错误均罚时15秒。
不允许出车库后只完成少量识别和搬运就直接回到车库的比赛方式,需至少完成60%以上的图片目标识别和搬运,则可以选择剩余部分不识别搬运,回到车库,加罚放弃和错误的部分即可。
搜索和搬运目标物是由亚克力板,或者相类似的材质制作的方形目标板。图片边长为10cm,具有1cm的黄色外边框,所以图片目标板为边长为12cm的方形,为了便于运动车模搬运,在圆盘底部粘贴有圆形铁片,可以被电磁铁吸附拾取。
目标板相关参数如下:
80mm,厚度1mm,重量约38g120mm,中心圆孔直径80mm,厚度1mm120mm,用100g纸张彩色打印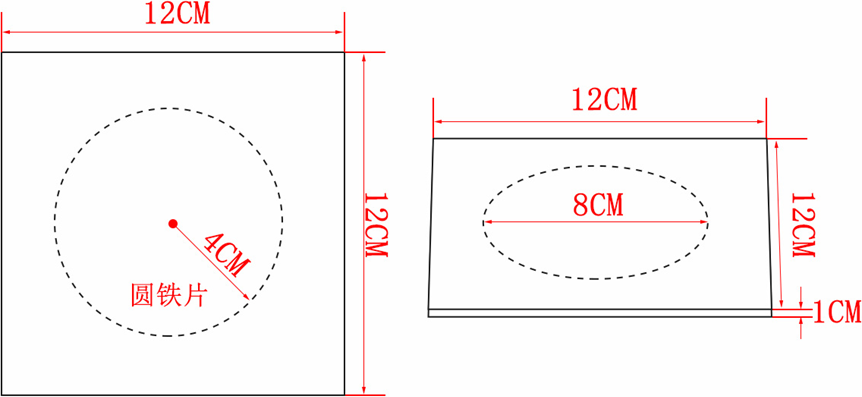
▲ 图2.2.2 方形目标图片尺寸以及结构示意图目标板的正面粘贴或者喷涂有用于识别的图片,如下图所示。
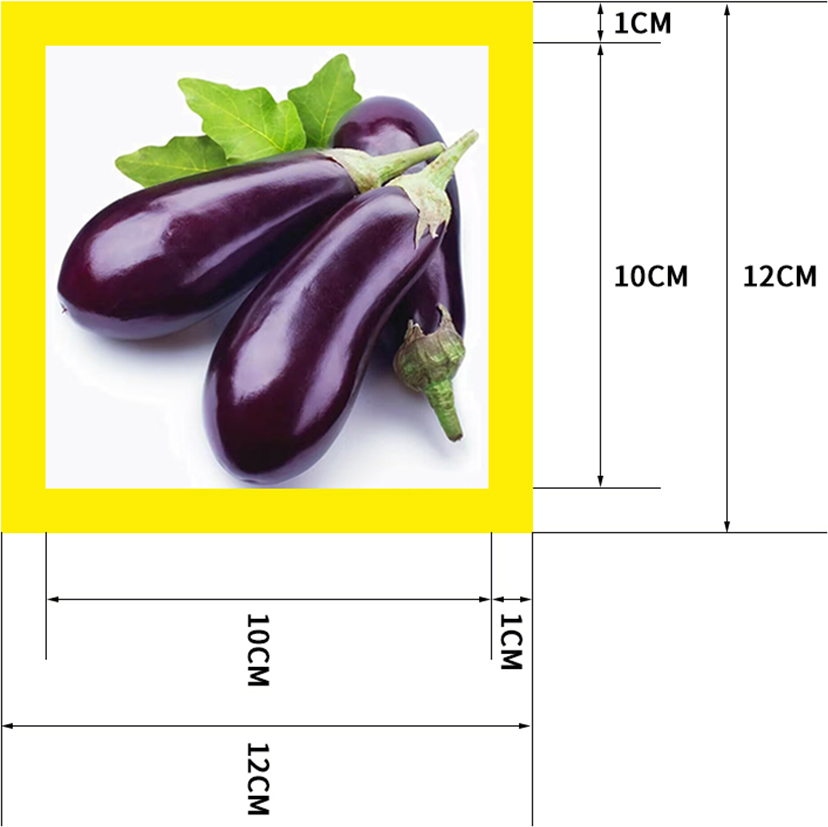
▲ 图2.2.1 目标板图片尺寸图 相比于上面的标准目标板,在比赛中搬运的图片中还存在一定数量的没有黄色边框图片。这类图片在赛场中的位置是随机摆放,它们的位置不会出现在最初的位置A4纸上。

▲ 图2.2.3 没有边框的图片示意图搜索目标图片种类包括有三大类,每一大类又包括有五种小类。
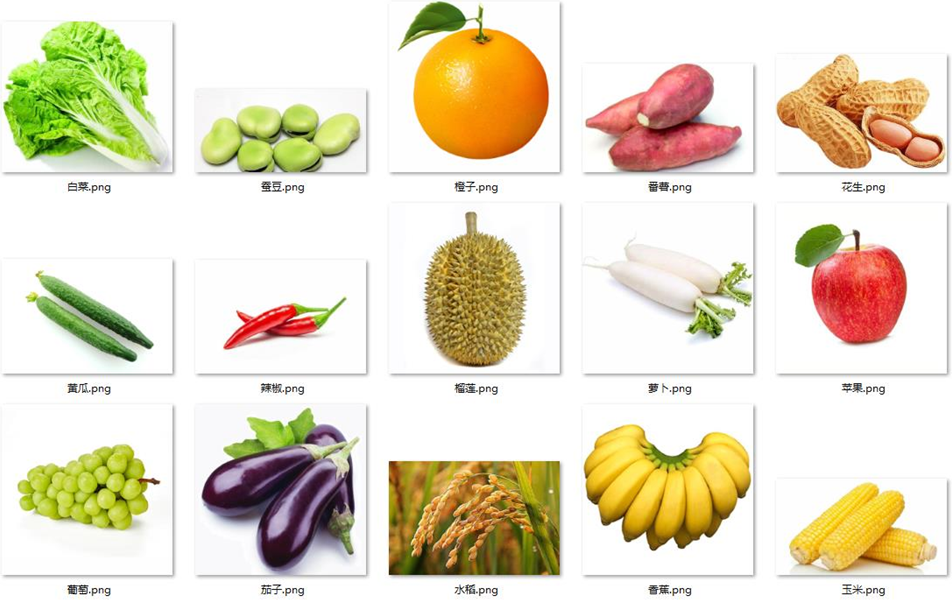
▲ 图2.2.4 数据集合示意图更多目标集合数据库,竞赛组委会将会另行发布。
车模从车库出发后,自行根据给定坐标搜索所有已知位置目标,再通过目标检测搜索随机区的未知位置目标,完成识别,根据目标识别的结果区分出小类,且将目标分类搬运到赛场边缘外(黄线外)指定区域。下图给出了15种目标小类最终搬运后所在的区域(目标图片需要最终放置于赛场黄色边界线以外,且不能位于模棱两可的双边交叉区)。
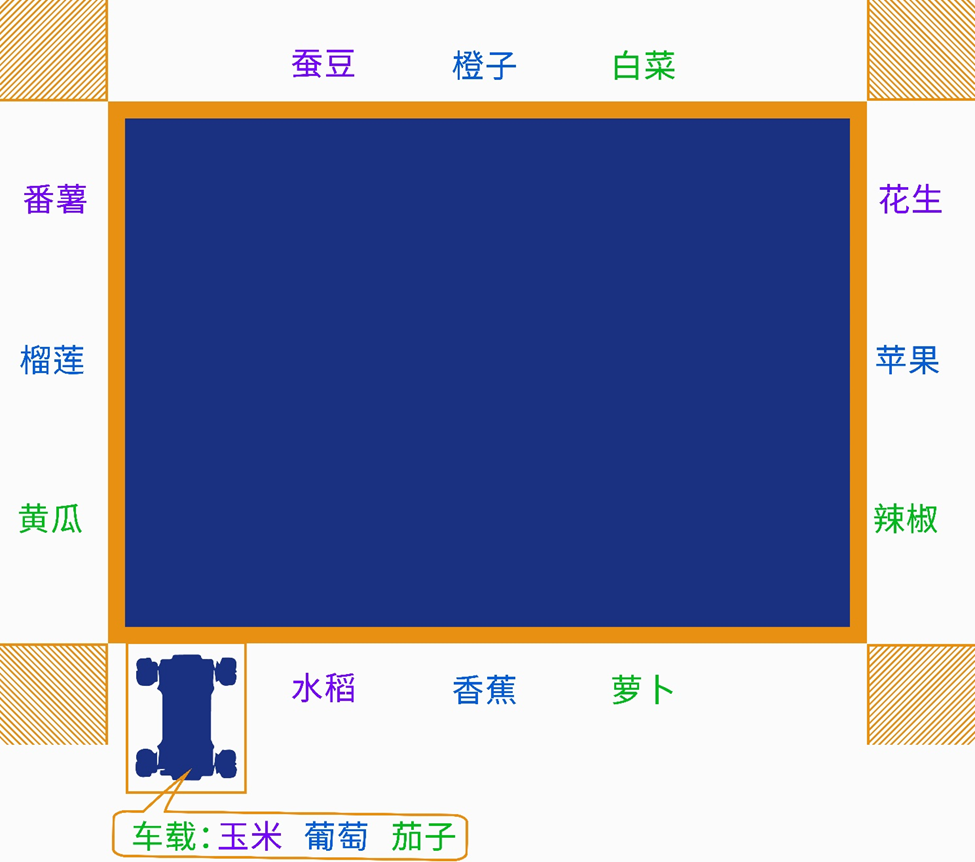
▲ 图2.2.5 搬运放置区域示意图在比赛的分区赛阶段,为了降低比赛难度,按照以上要求搬运即可。在决赛阶段,需要根据场地四条边线外的示意目标板来放置示意目标板对应的小类目标,对车模目标检测识别以及分类搬运都有更高的要求。
为了便于车模进行搜索时路径规划,比赛前场地内的目标位置固定好之后,将会打印在一张A4纸上,表明了场地内目标的数量和位置。参赛选手在按动比赛开始按钮之后便可以将目标位置放在车模镜头前,由车模进行识别之后开始后面的比赛过程。
目标位置示意图如下图所示,它是由黑色矩形框内若干圆形组成。矩形框的边框宽度大于1.5mm。长宽与实际比赛场地成正比。长宽最小的尺寸超过10厘米,最大不超过20厘米。
圆点的直径在 5 ~ 10mm,它的中心位置与场内目标物所在坐标成一一对应关系。
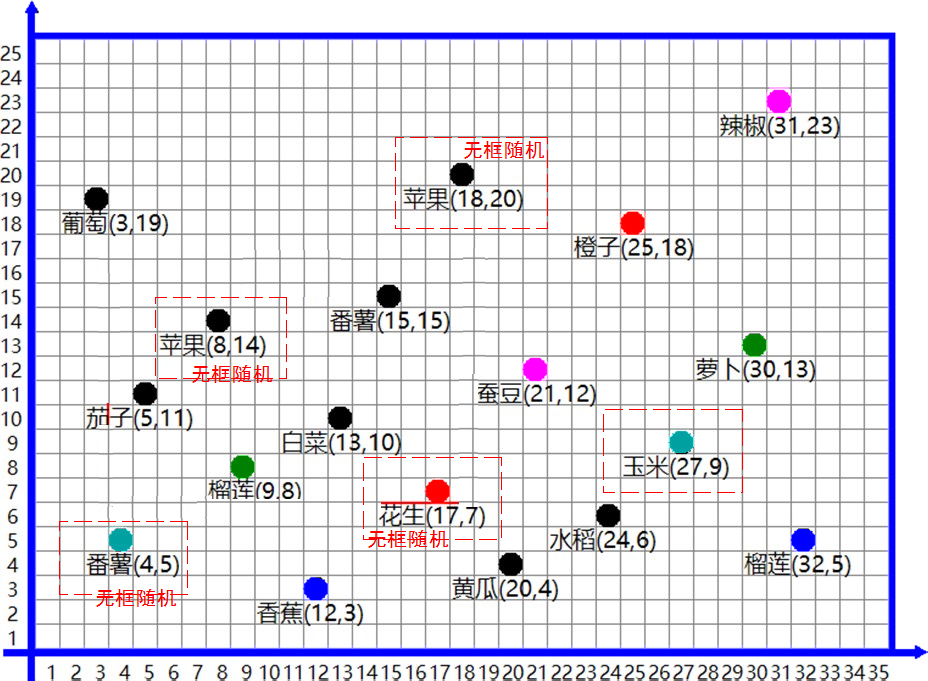
▲ 图2.2.6 图片摆放位置示意图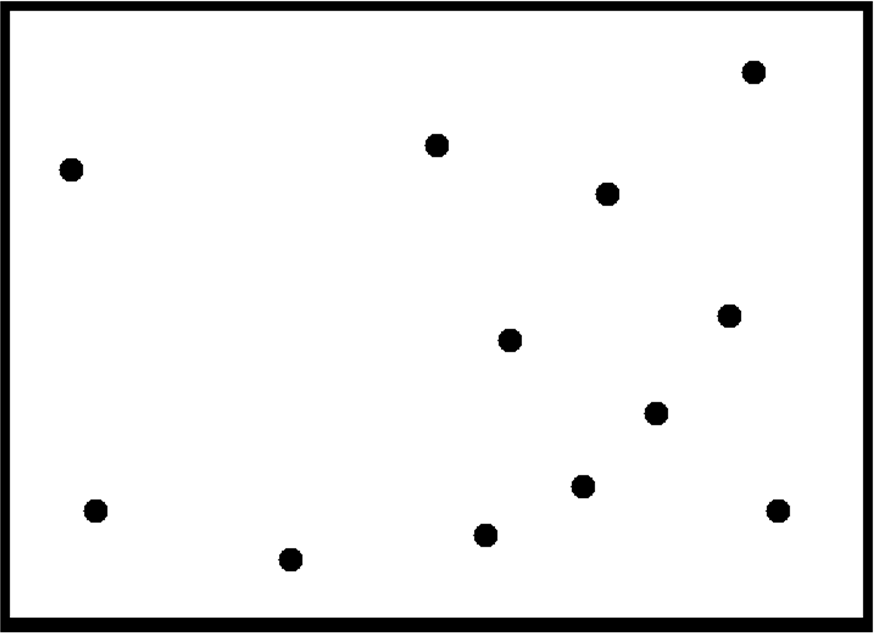
▲ 图2.2.8 小车识别电位示意图(随机区域坐标点将会被隐层,下边为X轴)智能视觉组允许增加语音人机交互,主要依靠语音交互在比赛中实现参赛队员通过语音 在场外通过蓝牙将语音指令传递 控制车模运行和执行动作。 要求是不允许使用 成品的语音模块, 必须使用恩智浦单片机 自行完成语音检测识别;为了保证语音交互不涉及到目标板内容的识别,发送语音命令的人员只能看到场内车模和目标板的位置,但无法看清目标板的内容。
智能视觉组允许双车协同,即允许制作两辆车模协同作业,但两个车模不是一模一样的车模。要求其中一辆是主车模, 另一辆只能负责协同搬运,类似联合收割机和搬运车。 在目标识别搬运过程中, 识别与搬运是主车的任务, 协同搬运车只能作为辅助搬运车模将目标板搬运到规定区域,辅助搬运车不允许安装视觉识别模块(但作为导航做的摄像头是允许安装),只能作为执行机构。 多车协同搬运和语音人机交互, 是可选的内容, 以提高比赛效率,也可以不选择,直接用单车完成。
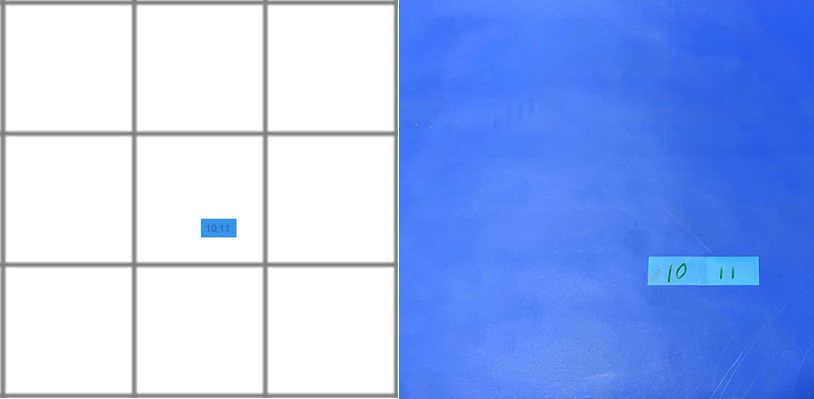
由于智能视觉组需要摆放目标板。为了方便对目标板进行定位,可以在赛场蓝色背景布上预先标记坐标点。比赛场地的坐标点需要提前用蓝色记号笔或者蓝色标签在场地上标识出来,标准是人眼能识别但摄像头很难识别出来,方便现场裁判更换放置目标板,同时又不对小车摄像头造成干扰。
可以淘宝上选择这种蓝色带背胶的标签纸,标定好坐标后贴在对应虚拟方框的右下角,这样在放置目标板时正好方便裁判进行定位,以确保目标板放置的位置正确以及横平竖直。

▲ 图2.2.9 用于标记坐标点的蓝色标签 虚拟框的右下角贴蓝色标签,标签上用不明显的记号笔写上坐标点。需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再贴标签,确保图片能尽量放置在虚拟框的中间。如下图所示:
▲ 图2.2.10 放置蓝色标签的位置实际做出来如上图所示,虚拟框是测量完成就撤下了,所以只看到背景、标签及标签上的坐标。
按标签纸的下边线和右边线定位放下目标板。或者直接用记号笔把虚拟框的右下角画出来,再写上坐标,如下图所示。用记号笔标记出虚拟框的右下角应当放置图片对应位置的直角边框,写上坐标点,需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再描直角边,确保图片能尽量放置在虚拟框的中间。也可以用记号笔进行图片放置点进行标识,标记原则与贴标签同理,用记号笔标记出虚拟框的右下角应当放置图片对应位置的直角边框,写上坐标点,需要注意虚拟框是20边长,图片是12CM边长,请自行确定好图片右下角对应的定位点再描直角边,确保图片能尽量放置在虚拟框的中间,如下图所示:
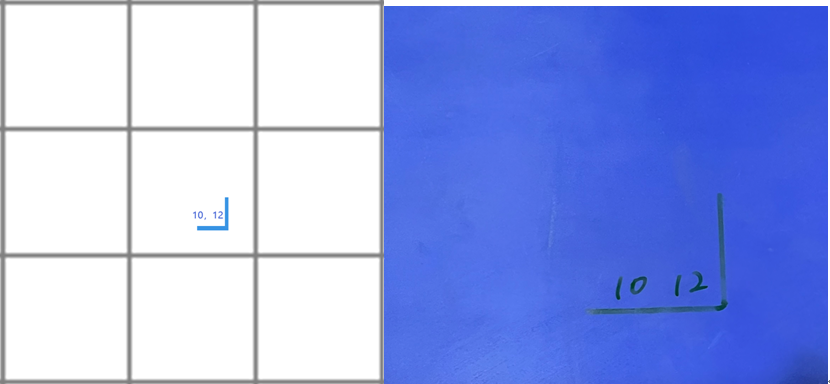
▲ 图2.2.11 标志图片坐标位置的示意图实际做出来如上图所示,定位完成后将虚拟方格的右下角直角两边描出,写上对应坐标点。推荐使用这种标记方法,不会脱落,需各赛点提前做好场地坐标点标识。
□ 标识方法推荐:建议3位同学对场地进行标识,先在场地四条边上标注清楚从16cm和20cm开始每间隔20cm的刻度,然后由两位同学按照平行边的刻度依次拉卷尺让第三位同学按照刻度进行画线标识。
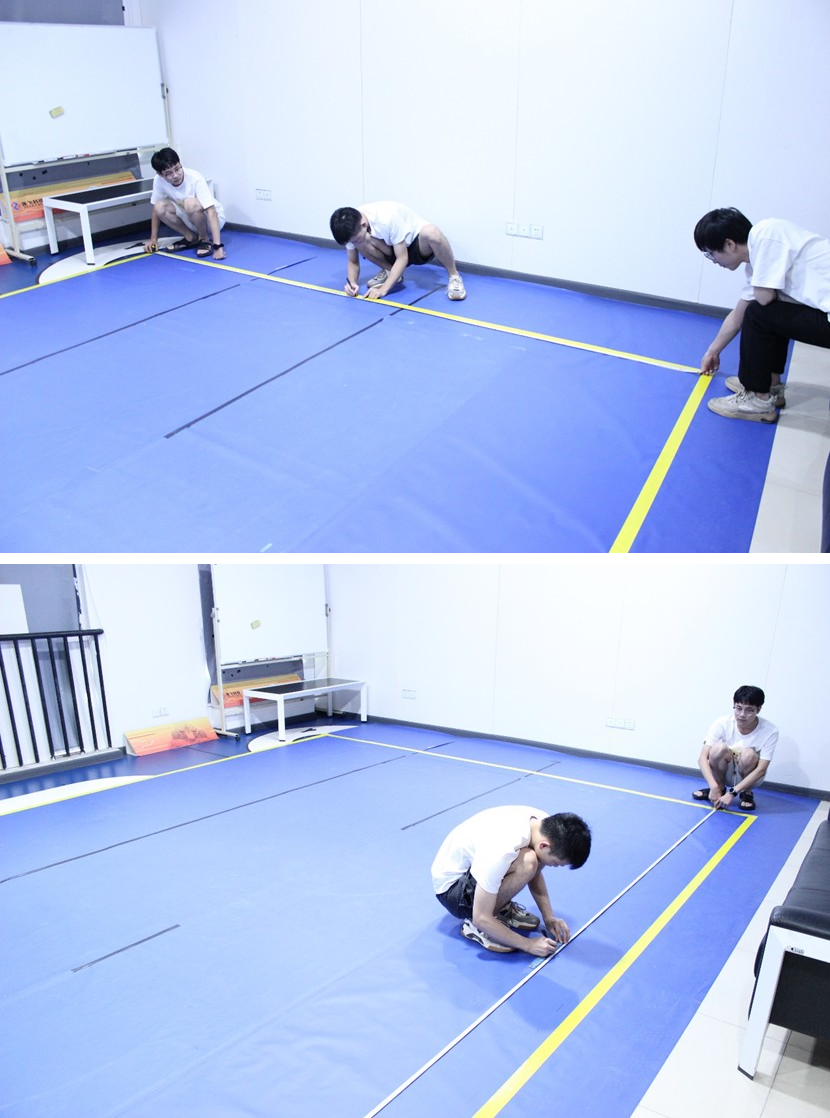
▲ 图2.2.12 标记过程操作示意图 横纵坐标点都画好后变标记好了场地内的500个坐标点,然后再用记号笔写上坐标号,最终如下图所示:

▲ 图2.2.13 边界上的坐标标记点放置图片示意如下:
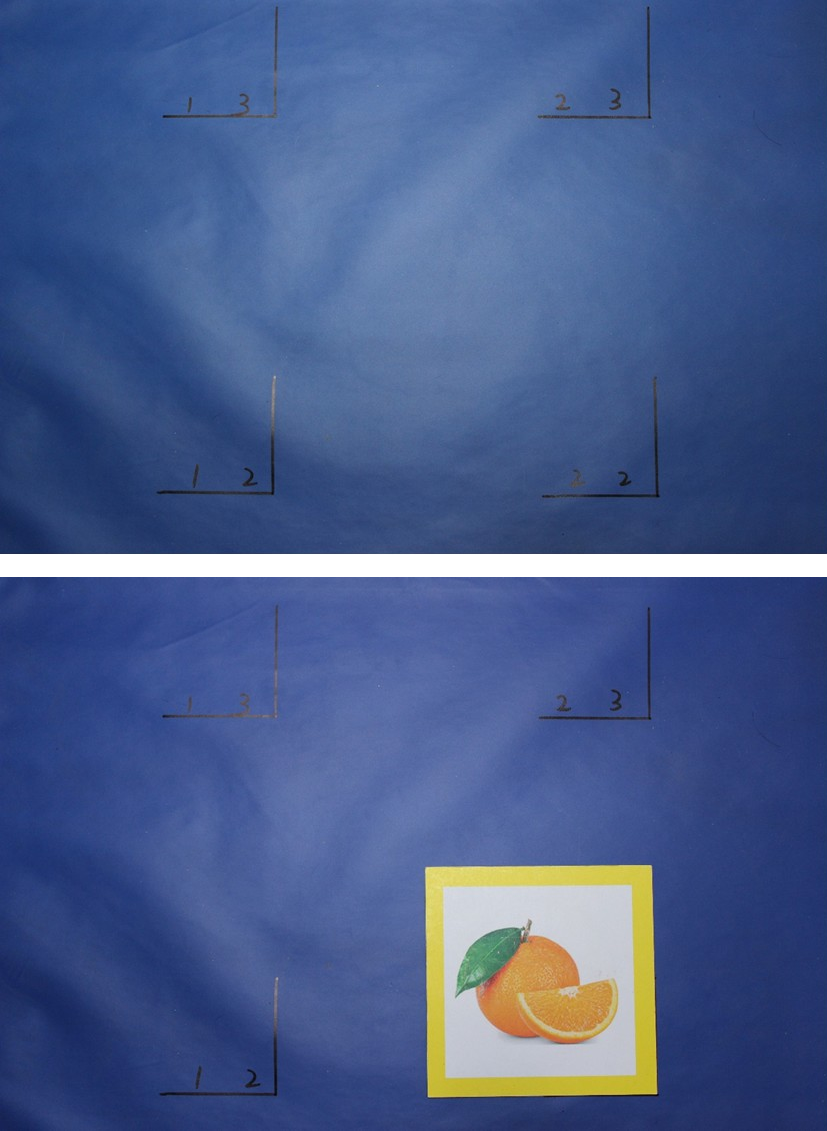
▲ 图2.2.14 目标板放置前以及放置后的效果图车模平台使用四轮麦克纳姆轮车模。可以自行选用北京科宇公司出品的H车模或广东博思公司的M车模两款车模。车模详细说明请参见已经公布的 《第十八届智能汽车竞赛竞速比赛细则》[1] 。
车模作品完成之后,车模的尺寸没有限制。车模允许使用电磁铁对图片目标进行拾取,电磁铁数量不限。车模允许设计各类型的机械臂或分类搬运装置,其中用于制作机械臂或分类搬运装置的伺服电机(包括舵机、电机、步进电机)数量不超过 五 个。
车模作品中所使用的微控制器需要是NXP公司出品的微控制器,微控制器数量没有限制。
如果微控制器中使用操作系统,则需要使用RT-Thread操作系统。
车模作品中允许使用(不限于)摄像头、IMU、电子罗盘、光电管等。如果使用摄像头,则摄像头的个数不超过 三 个。除OpenART mini外,其他所用传感器中不得含有MCU,若自制传感器,则允许含有NXP公司的MCU。
车模作品中不允许使用 UWB模块、RTK、激光扫描雷达(单点TOF除外)传感器。
可以使用C语言,Python语言完成车模中微控制器软件开发。
关于车模其它要求请参见 《第十八届智能汽车竞赛竞速比赛细则》[1] 中统一要求。
竞速比赛规则: https://zhuoqing.blog.csdn.net/article/details/127817742
