点击上方↑↑↑“OpenCV学堂”关注我
来源:公众号 英特尔物联网 授权
作者:英特尔物联网行业创新大使 杨雪锋
OpenVINO™ 2022.2版开始支持英特尔独立显卡,还能通过“累计吞吐量”同时启动集成显卡 + 独立显卡助力全速 AI 推理。本文基于 C# 和 OpenVINO™,将 PP-TinyPose 模型部署在英特尔独立显卡上。
1.1 PP-TinyPose 模型简介
PP-TinyPose 是飞桨 PaddleDetecion 针对移动端设备优化的实时关键点检测模型,可流畅地在移动端设备上执行多人姿态估计任务。PP-TinyPose 可以基于人体17个关键点数据集训练后,识别人体关键点,获得人体姿态,如图 1所示。

图 1 PP-TinyPose识别效果图
PP-TinyPose 开源项目仓库:
https://gitee.com/paddlepaddle/PaddleDetection/tree/release/2.5/configs/keypoint/tiny_pose
1.1.1
PP-TinyPose 框架
PP-TinyPose 提供了完整的人体关键点识别解决方案,主要包括行人检测以及关键点检测两部分。行人检测通过PP-PicoDet模型来实现,关键点识别通过 Lite-HRNet 骨干网络+DARK关键点矫正算法来实现,如下图所示:
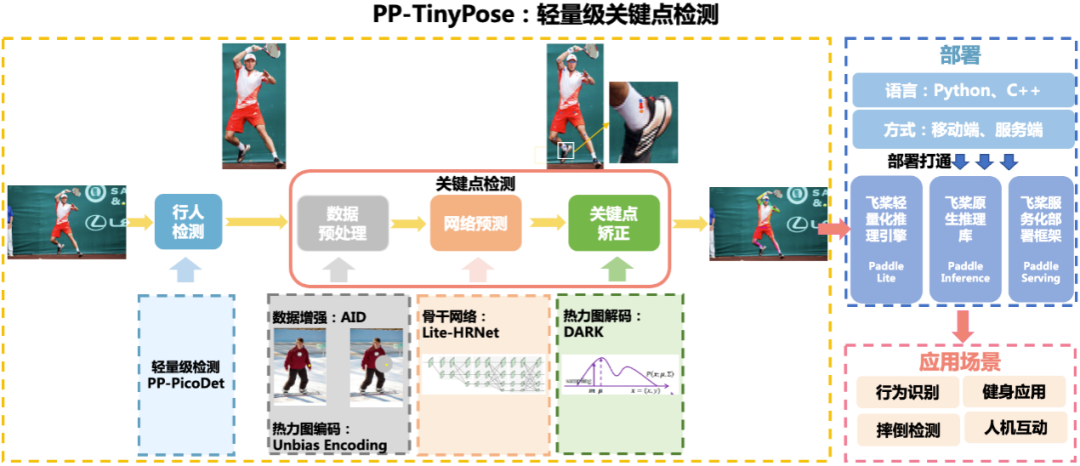
图 2 PP-TinyPose人体关键点识别
1.2 构建开发环境
本文构建的开发环境,如下所示:
OpenVINO™:2022.2.0
OpenCV:4.5.5
Visual Studio:2022
C#框架:.NET 6.0
OpenCvSharp:OpenCvSharp4
1.2.1
下载项目完整源代码
项目所使用的源码已在完整开源,读者可以直接克隆到本地。
git clonehttps://gitee.com/guojin-yan/Csharp_and_OpenVINO_deploy_PP-TinyPose.git
向右滑动查看完整代码
1.3 在 C# 中调用 OpenVINO™ Runtime API
由于 OpenVINO™ Runtime 只有 C++ 和 Python API 接口,需要在 C# 中通过动态链接库方式调用 OpenVINO™ Runtime C++ API。具体教程参考《在C#中调用OpenVINO™ 模型》,对应的参考范例:
https://github.com/guojin-yan/OpenVinoSharp.git
1.3.1
在 C# 中构建 Core 类
为了更方便的使用,可以在 C# 中,将调用细节封装到 Core 类中。根据模型推理的步骤,构建模型推理类:
(1)构造函数
public Core(string model_file, string device_name){// 初始化推理核心ptr = NativeMethods.core_init(model_file, device_name);}
向右滑动查看完整代码
在该方法中,主要是调用推理核心初始化方法,初始化推理核心,读取本地模型,将模型加载到设备、创建推理请求等模型推理步骤。
(2)设置模型输入形状
// @brief 设置推理模型的输入节点的大小// @param input_node_name 输入节点名// @param input_size 输入形状大小数组public void set_input_sharp(string input_node_name, ulong[] input_size) {// 获取输入数组长度int length = input_size.Length;if (length == 4) {// 长度为4,判断为设置图片输入的输入参数,调用设置图片形状方法ptr = NativeMethods.set_input_image_sharp(ptr, input_node_name, ref input_size[0]);}else if (length == 2) {// 长度为2,判断为设置普通数据输入的输入参数,调用设置普通数据形状方法ptr = NativeMethods.set_input_data_sharp(ptr, input_node_name, ref input_size[0]);}else {// 为防止输入发生异常,直接返回return;}}
向右滑动查看完整代码
(3)加载推理数据
// @brief 加载推理数据// @param input_node_name 输入节点名// @param input_data 输入数据数组public void load_input_data(string input_node_name, float[] input_data) {ptr = NativeMethods.load_input_data(ptr, input_node_name, ref input_data[0]);}// @brief 加载图片推理数据// @param input_node_name 输入节点名// @param image_data 图片矩阵// @param image_size 图片矩阵长度public void load_input_data(string input_node_name, byte[] image_data, ulong image_size, int type) {ptr = NativeMethods.load_image_input_data(ptr, input_node_name, ref image_data[0], image_size, type);}
向右滑动查看完整代码
加载推理数据主要包含图片数据和普通的矩阵数据,其中对于图片的预处理,也已经在 C++ 中进行封装,保证了图片数据在传输中的稳定性。
(4)模型推理
// @brief 模型推理public void infer() {ptr = NativeMethods.core_infer(ptr);}
向右滑动查看完整代码
(5)读取推理结果数据
// @brief 读取推理结果数据// @param output_node_name 输出节点名// @param data_size 输出数据长度// @return 推理结果数组public T[] read_infer_result<T>(string output_node_name, int data_size) {// 获取设定类型string t = typeof(T).ToString();// 新建返回值数组T[] result = new T[data_size];if (t == "System.Int32") { // 读取数据类型为整形数据int[] inference_result = new int[data_size];NativeMethods.read_infer_result_I32(ptr, output_node_name, data_size, ref inference_result[0]);result = (T[])Convert.ChangeType(inference_result, typeof(T[]));return result;}else { // 读取数据类型为浮点型数据float[] inference_result = new float[data_size];NativeMethods.read_infer_result_F32(ptr, output_node_name, data_size, ref inference_result[0]);result = (T[])Convert.ChangeType(inference_result, typeof(T[]));return result;}}
向右滑动查看完整代码
在读取模型推理结果时,支持读取整形数据和浮点型数据。
(6)清除地址
// @brief 删除创建的地址public void delet() {NativeMethods.core_delet(ptr);}
向右滑动查看完整代码
完成上述封装后,在 C# 平台下,调用 Core 类,就可以方便实现 OpenVINO™ 推理程序了。
1.4 下载并转换 PP-PicoDet 模型
1.4.1
PP-PicoDet 模型简介
Picodet_s_320_lcnet_pedestrian Paddle 格式模型信息如下表所示,其默认的输入为动态形状,需要将该模型的输入形状变为静态形状。
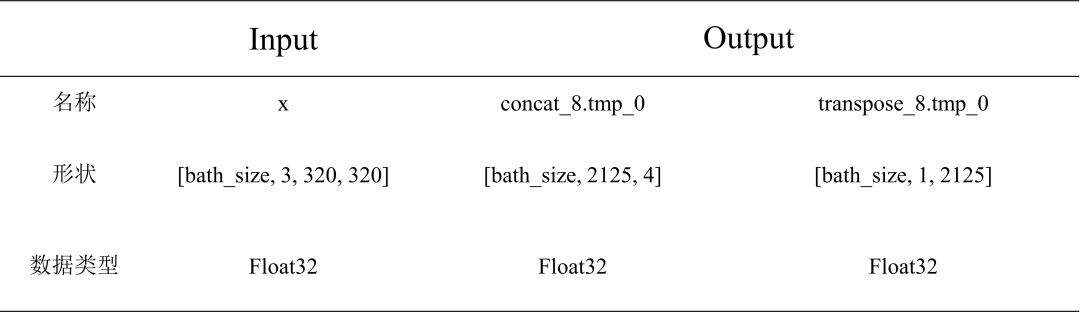
表 1 Picodet_s_320_lcnet_pedestrian Paddle 格式模型信息
1.4.2
模型下载与转换
第一步,下载模型
命令行直接输入以下模型导出代码,使用 PaddleDetecion 自带的方法,下载预训练模型并将模型转为导出格式。
导出 picodet_s_320_lcnet_pedestrian 模型:
python tools/export_model.py -cconfigs/picodet/application/pedestrian_detection/picodet_s_320_lcnet_pedestrian.yml -o export.benchmark=Falseexport.nms=Falseweights=https://bj.bcebos.com/v1/paddledet/models/keypoint/tinypose_enhance/picodet_s_320_lcnet_pedestrian.pdparams --output_dir=output_inference
向右滑动查看完整代码
导出 picodet_s_192_lcnet_pedestrian 模型:
python tools/export_model.py -cconfigs/picodet/application/pedestrian_detection/picodet_s_192_lcnet_pedestrian.yml -o export.benchmark=Falseexport.nms=Falseweights=https://bj.bcebos.com/v1/paddledet/models/keypoint/tinypose_enhance/picodet_s_192_lcnet_pedestrian.pdparams --output_dir=output_inference
向右滑动查看完整代码
此处导出模型的命令与我们常用的命令导出增加了两个指令:
export.benchmark=False 和 export.nms=False
主要是关闭模型后处理以及打开模型极大值抑制。如果不关闭模型后处理,模型会增加一个输入,且在模型部署时会出错。
第二步,将模型转换为 ONNX 格式
该方式需要安装 paddle2onnx 和 onnxruntime 模块。导出方式比较简单,比较注意的是需要指定模型的输入形状,用于固定模型批次的大小。在命令行中输入以下指令进行转换:
paddle2onnx --model_dir output_inference/picodet_s_320_lcnet_pedestrian --model_filename model.pdmodel --params_filename model.pdiparams --input_shape_dict "{'image':[1,3,320,320]}" --opset_version 11 --save_filepicodet_s_320_lcnet_pedestrian.onnx
向右滑动查看完整代码
第三步,转换为 IR 格式
利用 OpenVINO™ 模型优化器,可以实现将 ONNX 模型转为 IR 格式
mo --input_model picodet_s_320_lcnet_pedestrian.onnx --input_shape [1,3,256,192] --data_type FP16向右滑动查看完整代码
1.5 下载并转换 PP-TinyPose 模型
1.5.1
PP-TinyPose 模型简介
PP-TinyPose 模型信息如下表所示,其默认的输入为动态形状,需要将该模型的输入形状变为静态形状。
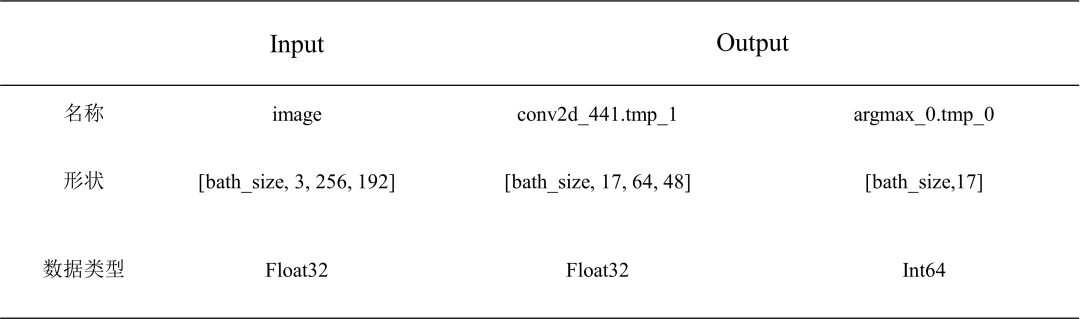
表 2 PP-TinyPose 256×192 Paddle 模型信息
1.5.2
模型下载与转换
第一步,下载模型
命令行直接输入以下代码,或者浏览器输入后面的网址即可。
wget https://bj.bcebos.com/v1/paddledet/models/keypoint/tinypose_enhance/tinypose_256x192.zip向右滑动查看完整代码
下载好后将其解压到文件夹中,便可以获得 Paddle 格式的推理模型。
第二步,转换为 ONNX 格式
该方式需要安装 paddle2onnx 和 onnxruntime 模块。在命令行中输入以下指令进行转换,其中转换时需要指定 input_shape,否者推理时间会很长:
paddle2onnx --model_dir output_inference/tinypose_256_192/paddle --model_filename model.pdmodel --params_filename model.pdiparams --input_shape_dict "{'image':[1,3,256,192]}" --opset_version 11 --save_filetinypose_256_192.onnx
向右滑动查看完整代码
第三步,转换为 IR 格式
利用 OpenVINO™ 模型优化器,可以实现将 ONNX 模型转为 IR 格式。
cd .\openvino\toolsmo --input_model paddle/model.pdmodel --input_shape [1,3,256,192] --data_type FP16
向右滑动查看完整代码
1.6 编写 OpenVINO™ 推理程序
1.6.1
实现行人检测
第一步,初始化 PicoDet 行人识别类
// 行人检测模型string mode_path_det = @"E:\Text_Model\TinyPose\picodet_v2_s_320_pedestrian\picodet_s_320_lcnet_pedestrian.onnx";// 设备名称string device_name = "CPU";PicoDet pico_det = new PicoDet(mode_path_det, device_name);
向右滑动查看完整代码
首先初始化行人识别类,将本地模型读取到内存中,并将模型加载到指定设备中。
第二步,设置输入输出形状
Size size_det = new Size(320, 320);pico_det.set_shape(size_det, 2125);
向右滑动查看完整代码
根据我们使用的模型,设置模型的输入输出形状。
第三步,实现行人检测
// 测试图片string image_path = @"E:\Git_space\基于Csharp和OpenVINO部署PP-TinyPose\image\demo_3.jpg";Mat image = Cv2.ImRead(image_path);List result_rect = pico_det.predict(image);
向右滑动查看完整代码
在进行模型推理时,使用 OpenCvSharp 读取图像,然后带入预测,最终获取行人预测框。最后将行人预测框绘制到图片上,如下图所示。
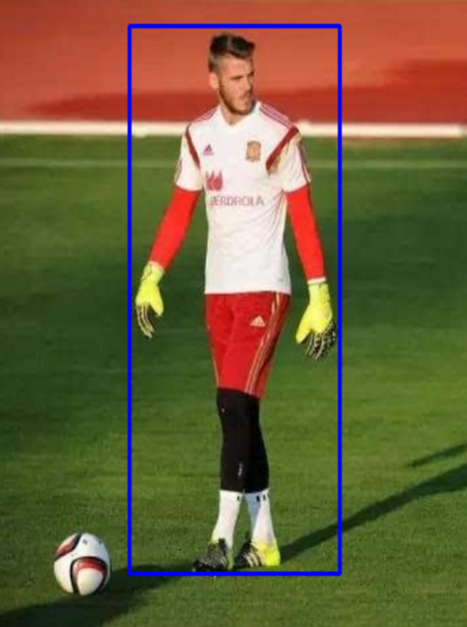
图 3 行人位置预测结果
1.6.2
实现人体姿态识别
第一步,初始化 P 人体姿势识别 PPTinyPose 类
// 关键点检测模型// onnx格式string mode_path_pose = @"E:\Text_Model\TinyPose\tinypose_128_96\tinypose_128_96.onnx";// 设备名称string device_name = "CPU";PPTinyPose tiny_pose = new PPTinyPose(mode_path_pose, device_name);
向右滑动查看完整代码
首先初始化人体姿势识别 PPTinyPose 类,将本地模型读取到内存中,并加载到设备上。
第二步,设置输入输出形状
Size size_pose = new Size(128, 96);tiny_pose.set_shape(size_pose);
向右滑动查看完整代码
PP-TinyPose 模型输入与输出有对应关系,因此只需要设置输入尺寸
第三步,实现姿势预测
// 测试图片string image_path = @"E:\Git_space\基于Csharp和OpenVINO部署PP-TinyPose\image\demo_3.jpg";Mat image = Cv2.ImRead(image_path);Mat result_image = tiny_pose.predict(image);
向右滑动查看完整代码
在进行模型推理时,使用 OpenCvSharp 读取图像,然后带入预测,最终获取人体姿势结果,如下图所示。

图 4 人体姿态绘制效果图
1.6.3
推理速度测试
本项目在蝰蛇峡谷上完成测试,CPU 为 i7-12700H,自带英特尔® 锐炬® Xe 集成显卡;独立显卡为英特尔®锐炫® A770M 独立显卡 + 16G 显存,如下图所示。

图 5 蝰蛇峡谷
测试代码已开源:
https://gitee.com/guojin-yan/Csharp_and_OpenVINO_deploy_PP-TinyPose.git
测试结果如下表所示
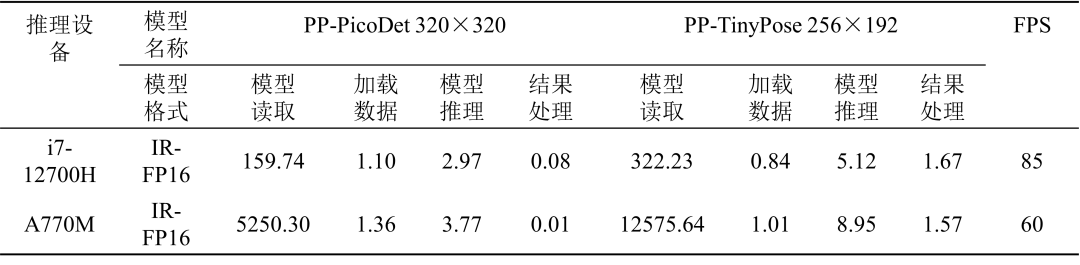
表 3 PP-PicoDet 与 PP-TinyPose 模型运行时间(ms)
加载数据:将待推理数据进行处理并加载到模型输入节点;
模型推理:模型执行推理运算;
结果处理:在模型输出节点读取输出数据,并转化为我们所需要的结果数据。
1.7 总结与未来工作展望
本文完整介绍了在 C# 中基于 OpenVINO™ 部署 PP-TinyPose 模型的完整流程,并开源了完整的项目代码。
从表3的测试结果可以看到,面对级联的小模型,由于存在数据从 CPU 传到 GPU,GPU 处理完毕后,结果从 GPU 传回 CPU 的时间消耗,独立显卡相对 CPU 并不具备明显优势。

