ADI智库近日即将上线《自动驾驶车辆导航中的MEMS IMU》在线培训课程,介绍了IMU在这些系统中作用的功能概述,特别强调了在新兴AGV系统概念和架构开发阶段中经常被忽视且强调不足的重要性能指标和关键功能。

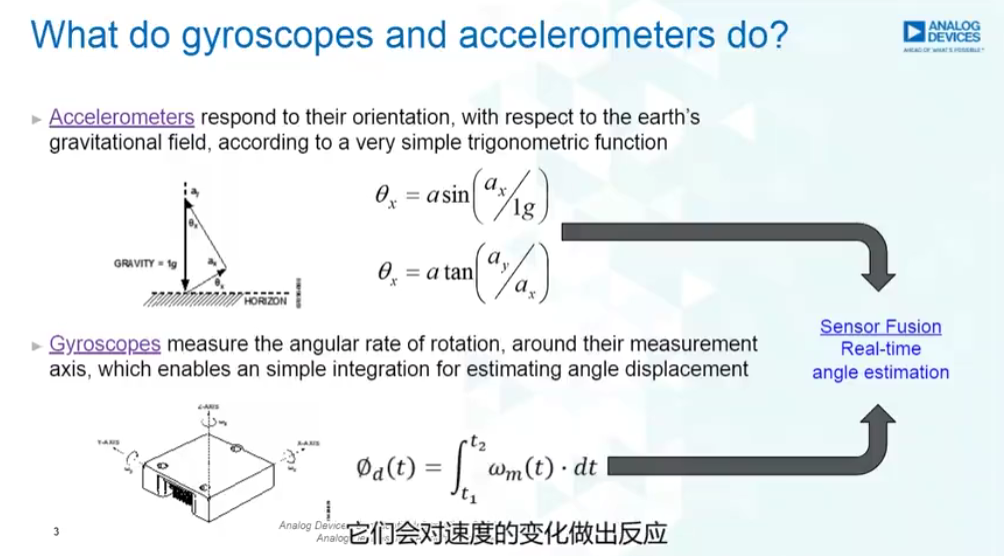
IMU传感器代表惯性测量单元,它沿着三个正交轴(X Y Z),测量旋转角速率和线性加速度。由于加速度计不像陀螺仪一样有累加或积分,所以出现偏置误差或其他类型的误差时,这些误差会持续存在,但不会累积。在使用IMU时,徐春在最佳时加重输入,也需要根据环境进行调整。
如果查看典型的反馈系统,会发现IMU的主要功能就是在制导和导航控制系统中用作反馈检测元件,实际上是通过对平台的直接惯性测量来发挥作用,客户、系统架构师和开发人员能够使用这些观察值来关闭环路。
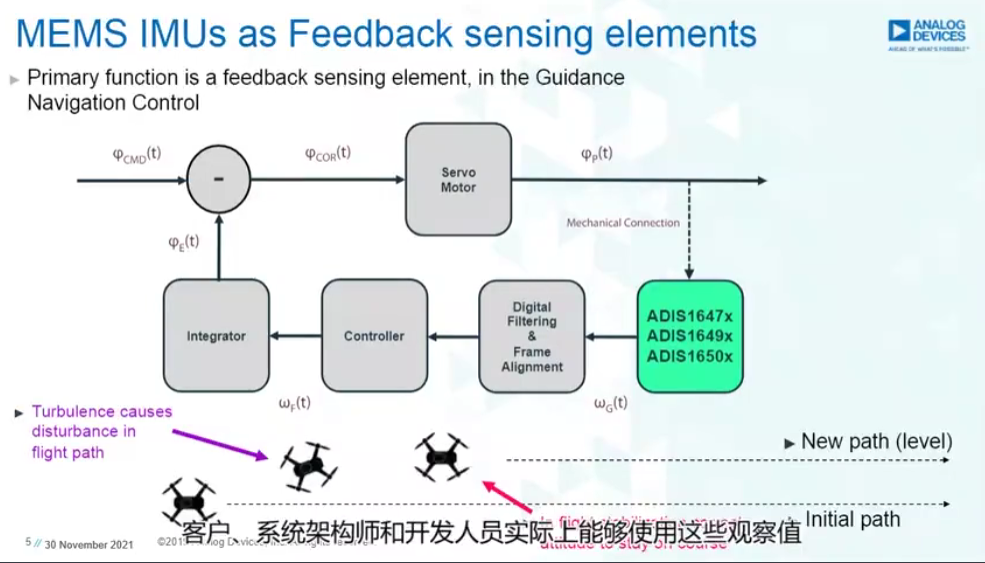
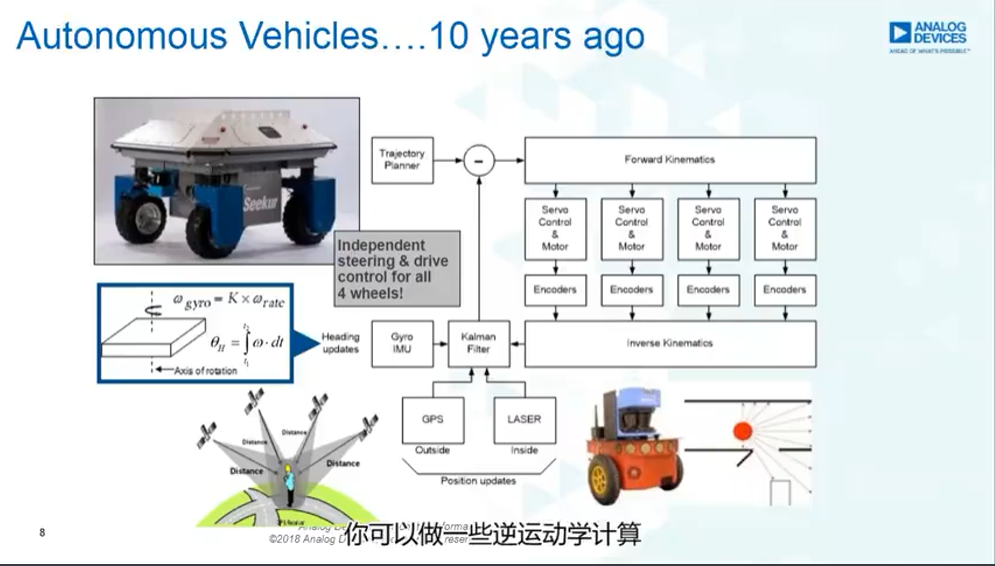
最简单的方式可能就是一开始就将IMU视为用于进行反馈控制的实时角度跟踪和测量单元;另一项应用与制导和导航设置相关。
安全停止指的是以初始速度启动之后,减速到某个水平后汽车安全停下。直路的情况下非常好分析,但是万一路况有坡度,或者需要强制刹车的情况下,汽车能以多快的速度停车呢?IMU可以帮助分析这一点。

