--关注回复“SOA”--
↓↓领取:面向智能车辆开发的开放性SOA方案↓↓
假期,很多人都会选择自驾出行,不过交通拥堵煞风景,如果能实现自动驾驶就好了。现代车辆的自动驾驶是如何实现的?雷达在其中发挥了怎样的作用?
什么是雷达?
自动驾驶好比行人走路,先用眼睛观察确定路线,然后大脑再给身体下指令。对汽车而言,各种雷达、摄像头等传感器就是汽车的眼睛,电子线路就是中枢神经,计算分析等控制系统如同大脑,最终决定了汽车的前行方向与速度。而在这些器官中,“眼睛”起到了十分关键的作用,为了使得车辆能够像人一样敏锐地感知周围的环境信息,我们就需要给汽车安装一双慧眼——雷达。
雷达一词来源于Radar的英文音译,是英文“无线电探测与测距”的缩写。顾名思义,雷达的作用是发现目标与确定目标的“位置”,这和我们眼睛的功能是极为相似的。
那么雷达是如何工作的呢?举个形象的例子,当我们处于一个没有灯光的黑暗环境时,我们很难通过肉眼分辨周围的物体。此时我们打开手电筒,周围变得清晰并且可以比较准确地定位周围物体的相对位置。这个发现周围物体的过程可以分解为以下步骤:
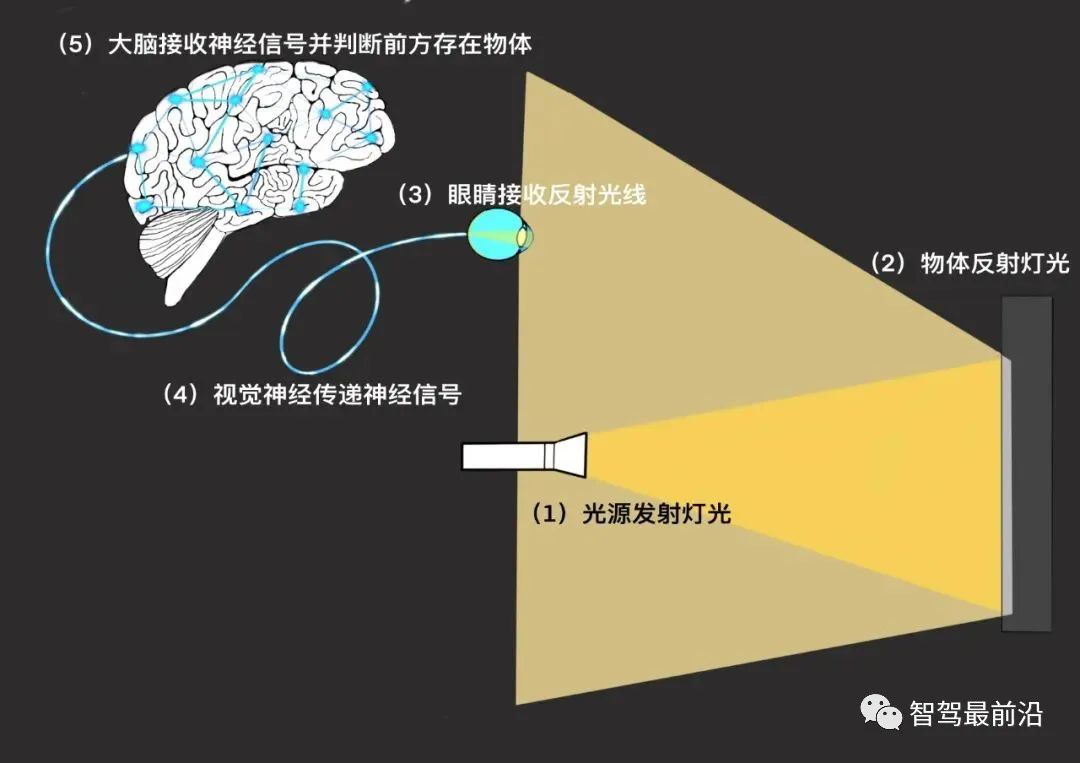
大脑发现物体的过程(供图/史金阳)
首先,我们使用手电筒发射灯光,使得手电光照在周围的物体上,由于物体的表面不能完全吸收这些光,所以会反射一些光到环境中。随后,眼睛接收到这些反射的灯光并把眼睛接收的灯光信息转换为神经脉冲信号。神经脉冲信号经过神经的传导到达大脑。最后,大脑经过判断,意识到周围物体的存在并根据双眼角度确定物体的相对位置。当然,以上过程只在一瞬间就完成了。
如果将上述过程中的手电筒换成一个雷达的发射机,接收光线的眼睛替换为雷达的接收机,雷达的信号处理系统等效为大脑,我们就可以形象地理解雷达系统的运作原理了。雷达通过脉冲回波与发射脉冲的间隔确定与目标的距离。之后通过实验测量出电磁波在当地环境下的传播速度,然后便可以通过确定发射脉冲与反射波的间隔确定电磁波的飞行时间。当我们拥有了速度与时间两个参量,我们就可以使用速度与时间的乘积的一半计算出两者间隔的距离。
全天候“服务管家”——毫米波雷达
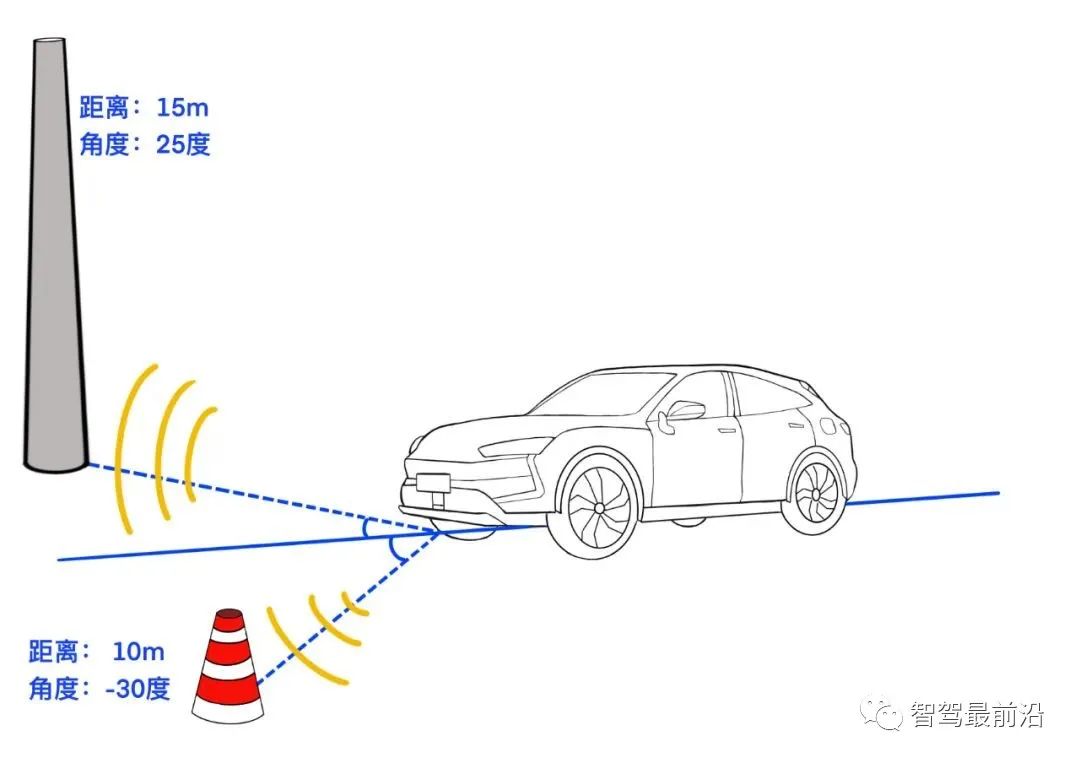
毫米波指波长介于1-10纳米的电磁波,毫米波雷达则指工作在毫米波波段的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。毫米波雷达得益于特殊的高增益天线(天线增益越高,方向性越好)设计,它的方向性极强,能够准确地辨别障碍物的相对位置。假如当雷达的方向性相对较差的时候,它将照射一个较大的范围,那么如果出现障碍物,我们很难准确测量它的相对位置,只能确定它在这个范围内的某个位置附近。而当雷达的方向性较好的时候,一旦探测到了物体,物体的位置就可以更加准确地框在这个较小的范围内。
搭载雷达的无人驾驶汽车(供图/史金阳)
由于毫米波具有较好的穿透性,所以毫米波雷达在烟雾、扬尘环境中仍然可以对周围环境准确感知,具有全天候全天时的特点。这些特性对于自动驾驶而言极为重要,它可以在能见度较差的条件下分辨来往车辆、人员、低矮路障以及细小障碍物,避免车辆因为缺乏对周围信息的感知而作出错误决策,从而为乘客的安全提供有效的保障。
驾驶界的“香饽饽”——激光雷达
要想实现车辆的辅助驾驶或更高阶的自动驾驶,车辆必须要能感知自己所处的环境,这对于汽车行业是一个新的挑战,也是实现自动驾驶最关键的一步。
激光雷达也可以叫作Lidar,就是激光(Laser)与雷达(Radar)的集合。其实大家对它并不陌生,因为在很多无人驾驶汽车在道路上进行行驶实验时,车顶上都会架一个看上去和摄像头差不多,但是会一直在一定角度内旋转的“小罐子”,那通常就是激光雷达了。
激光雷达是一种利用光波进行测量的主动探测方式。主动探测方式是指探测系统通过接收自身发出的信号回波来进行测量,区别于例如摄像机等通过接收环境光获取信号的被动探测方式。激光雷达通过测量激光从发出经障碍物反射到被传感器接收所经历的时间,来计算障碍物的距离。
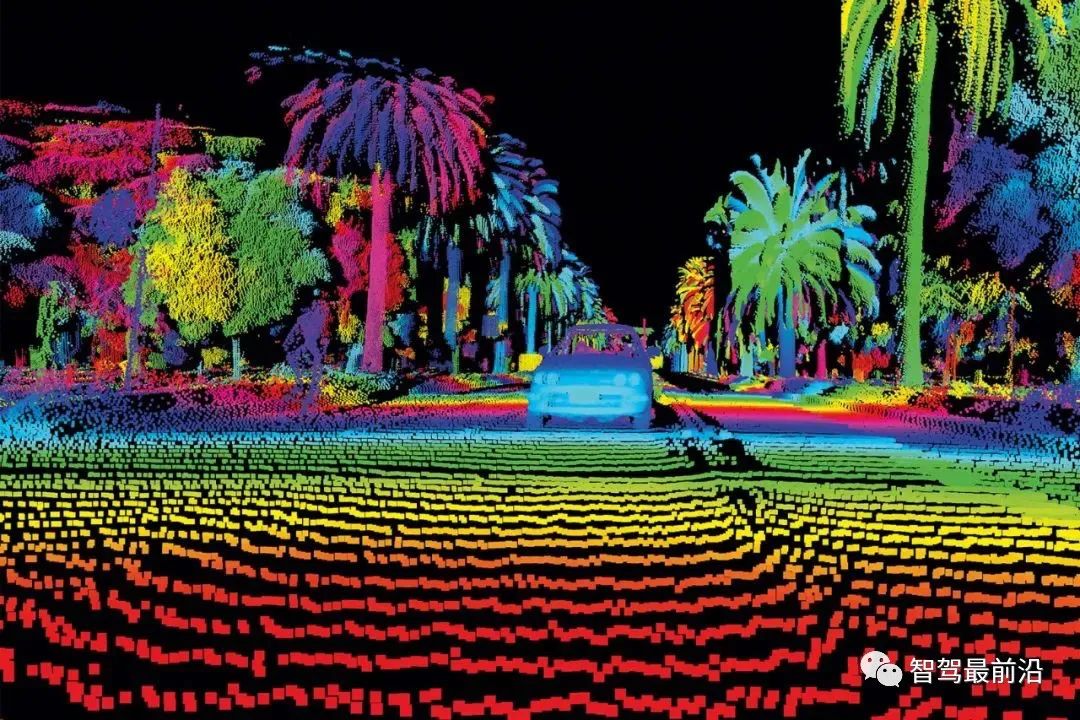
激光雷达的扫描感知图(供图/陈鲲)
举个例子来说,毫米波雷达可以发现路边障碍,但只能“看到”模糊形体,而厘米级精度的激光雷达则可以在极短时间内清楚区分出障碍是路肩还是斜坡。若无人驾驶汽车断定是斜坡后,就可以作出安全开上车道的决策。这种精度对上路行驶的无人驾驶汽车而言,可以更接近极致安全。

激光雷达测距效果图
由于激光波长比毫米波短3个数量级,因此分辨率精度比毫米波强很多,可以清楚地识别周围的车辆、行人与障碍物。但由于大多数物体在激光波段存在吸收与反射,传播距离也比毫米波短不少,雨天时,激光可能被雨滴吸收或反射,干扰行车安全。由于车路协同是未来自动驾驶的趋势,激光雷达也可以应用到路端,由路端实时扫描并同步推送给附近车辆。
激光雷达与毫米波雷达是汽车探路的左膀右臂。激光雷达处理近处高精度的建模,在复杂的街道保障行车安全。毫米波雷达处理远处低精度的建模,保障复杂天气的行车安全。
期待未来的无人驾驶汽车可以搭载低成本的激光雷达与毫米波雷达,全面应对复杂的道路状况,让出行变得更安全,交通更顺畅。
知识拓展激光雷达“大解剖”
激光雷达主要由激光发射模块、接收模块、扫描器、透镜天线和信号处理模块组成。
激光发射模块主要是发射激光脉冲,调控激光光束;激光接收模块主要是接收返回的激光,产生信号;信息处理模块主要是将信号放大分析计算并建模。而扫描器的主要作用则是以一定形式驱动雷达在一个或多个平面内扫描周围情况,扫描器一般分为机械式、转镜式、微镜式与泛光面阵式等。
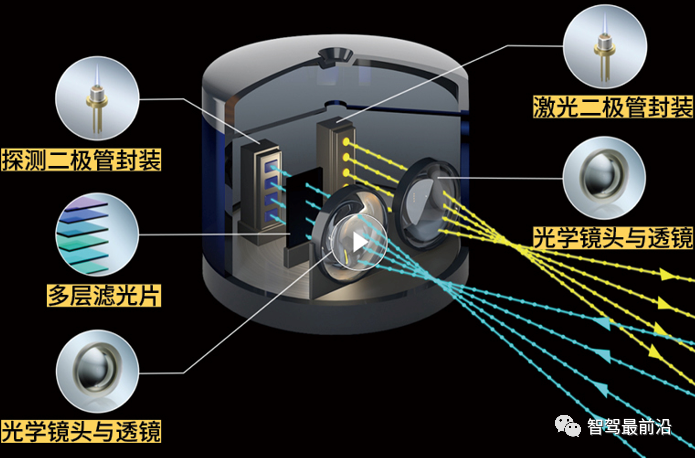
机械式扫描器是将雷达扫描器装在车顶上,机械转动整个雷达扫描器,实现扫描(供图/陈鲲)
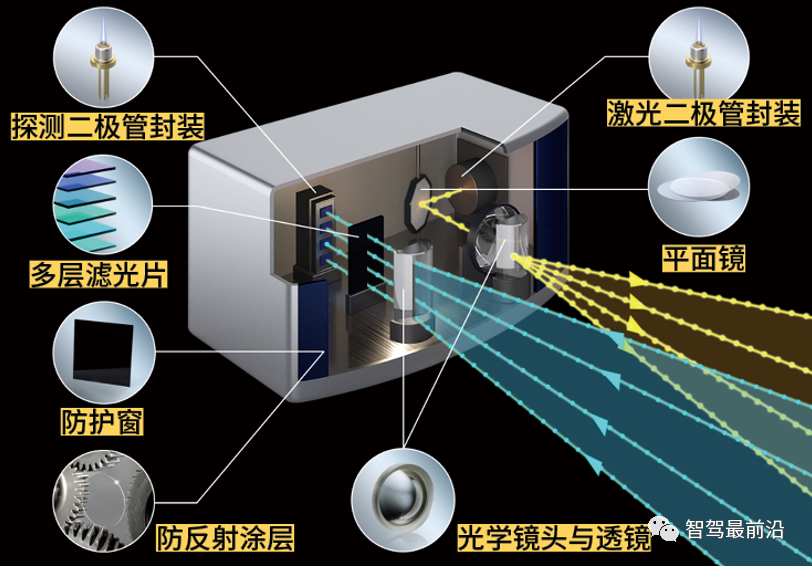
转镜式扫描器是通过一个可机械旋转的平面镜控制光束出射角度,实现扫描,与机械式类似(供图/陈鲲)
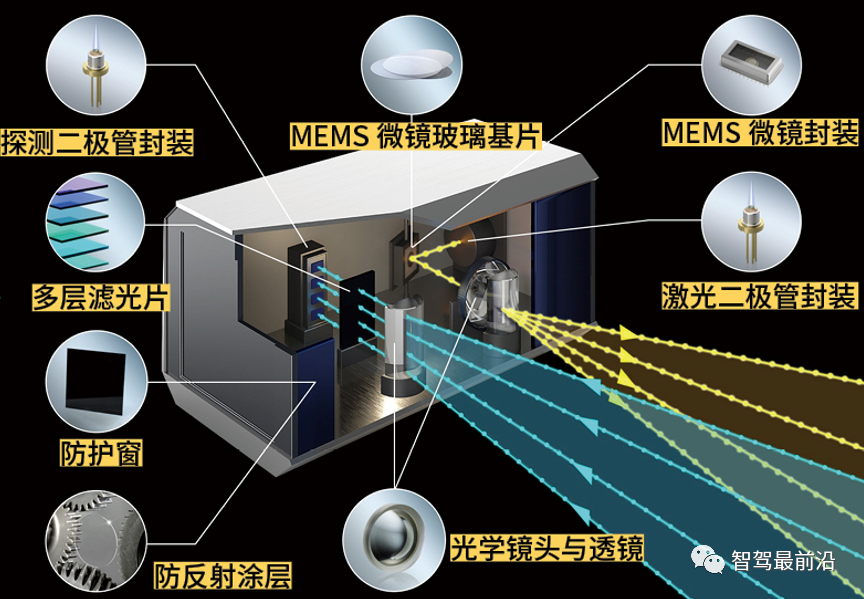
微镜式扫描器通过调节微镜发出电控光束实现扫描,缺点是无法360度扫描(供图/陈鲲)

泛光面阵式扫描器内置一个扩束镜,通过向前方发射一束发散的激光,可以快速得到单一方向的数据,缺点是探测距离低,成像精度低(供图/陈鲲)
转载自《知识就是力量》杂志,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --