
最近,康奈尔大学的一组研究人员成功地在一个太阳能驱动的智能微型机器人身上安装了“大脑”。

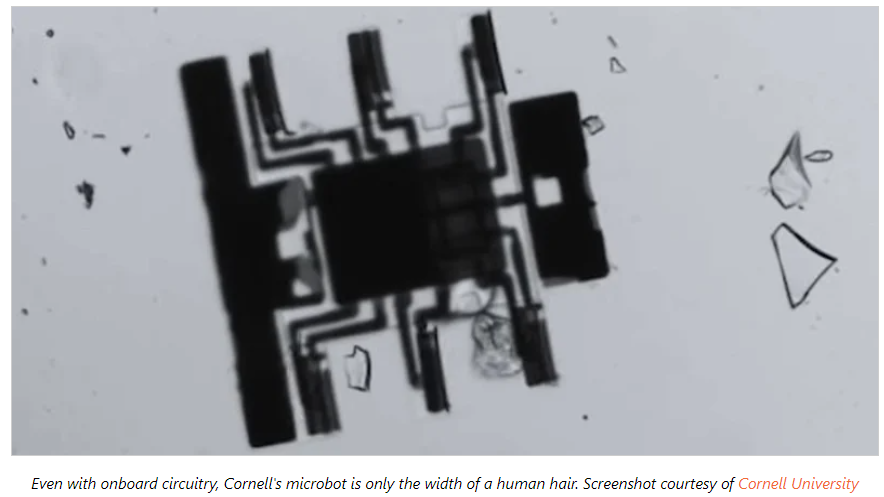
这些微型机器人的尺寸在100到250微米之间——几乎是人类一根头发的宽度。这种大小的机器人通常是外部控制的,但康奈尔大学的原型包括一个板载电路来控制其运动。
制造无线行走机器人
近年来,康奈尔大学的研究人员已经开发出可以爬行、行走、游泳且可以弯曲身体的微型机器人。但这些微型机器人的运动都是由外部电线或聚焦激光束控制的。
康奈尔大学文理学院的物理学教授Itai Cohen召集了一组研究人员,寻找去除外部控制后让微型机器人能够自主运动的方法。过去如果没有wire bond和多芯片堆叠,研究人员很难将微型机器人扩展到微米级。典型的CMOS电路包括不同功能的wire bond,这会增加IC的尺寸和重量,使其难以缩小;另一个主要挑战是一体化全功能的机器人必须实现CMOS集成电路和微执行器的异构集成。
康奈尔大学的研究人员结合了表面电化学促动器(surface electrochemical actuators, 简称SEAs)和硅光伏(PVs)来克服这些挑战。一旦CMOS电路接收到电压信号,氧分子就会附着并膨胀到这一层,使执行器弯曲机器人的腿。
微型机器人的“大脑”和制造过程
康奈尔大学的研究人员称,微型机器人的“大脑”是一个简单的CMOS时钟电路,实现一个包含晶体管、二极管、电阻和电容的阵列。该集成电路产生一个信号来控制机器人的步态。在测试阶段,微型机器人可以每秒移动4到20微米。
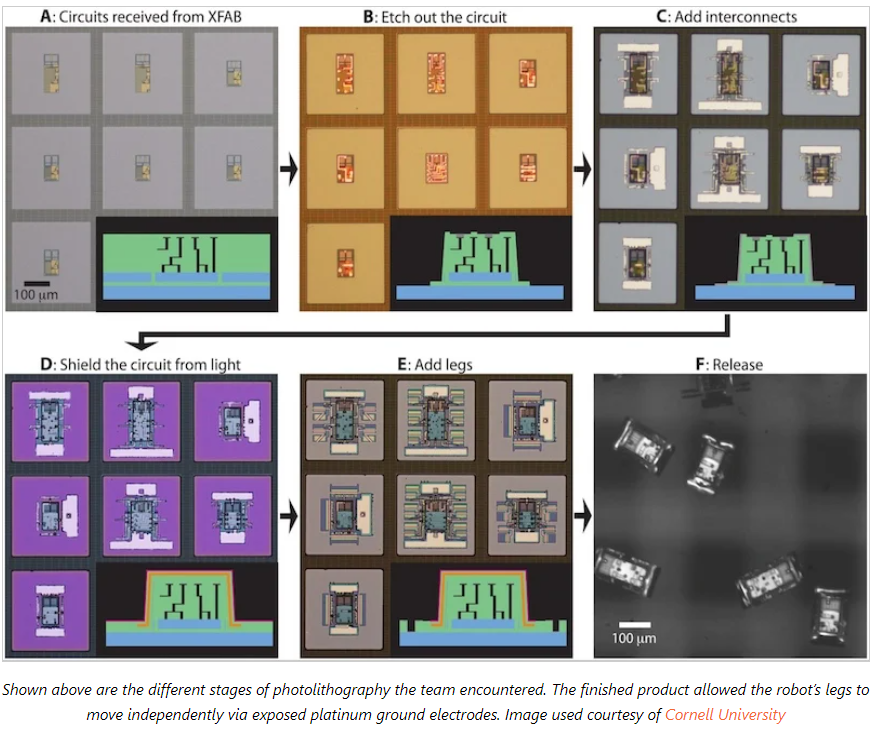
研究小组克服的最后一个障碍是制造过程。这一过程需要13层光刻,12次蚀刻和11次10种不同材料的沉积。利用该大学的纳米科学技术设施(CNF),研究人员最终完成了一个8英寸的硅晶圆。有了这种晶圆,微型机器人的光伏电源和CMOS时钟电路就不会干扰机器人的腿部运动。
太阳能驱动微型机器人
微型机器人有两对基于光伏的电源,为腿的运动和时钟电路提供专用电源。CMOS时钟电路由一个弛豫振荡器组成,作为时钟输出和频率驱动器。频率驱动器由一系列D触发器组成,可将脉冲转换为50%占空比,使机器人可以轻松地通过输出引脚发送信号。
在测试阶段,康奈尔大学的研究人员发现,在1到3千瓦/平方米的连续光强下,微型机器人的速度达到12 μm/s。虽然研究人员可以通过将输入频率提高到4Hz来提高速度,但该团队还是将工作频率保持在1到2Hz之间,保证微型机器人不会在平面上打滑。
微型机器人在清洁、监测、手术方面的潜力
康奈尔大学的研究人员表示,这些微型机器人可以用于环境清理、医疗物质监测和显微手术。
研究人员正在致力于整合机器学习算法,这样微型机器人就可以独立学习和适应环境。该团队希望在未来的研究中,通过实现更复杂的任务和基于人工智能的算法来扩展微型机器人家族。
原文链接:
https://www.allaboutcircuits.com/news/researchers-put-electronic-brains-onboard-walking-microbots
高端微信群介绍 | |
创业投资群 | AI、IOT、芯片创始人、投资人、分析师、券商 |
闪存群 | 覆盖5000多位全球华人闪存、存储芯片精英 |
云计算群 | 全闪存、软件定义存储SDS、超融合等公有云和私有云讨论 |
AI芯片群 | 讨论AI芯片和GPU、FPGA、CPU异构计算 |
5G群 | 物联网、5G芯片讨论 |
第三代半导体群 | 氮化镓、碳化硅等化合物半导体讨论 |
存储芯片群 | DRAM、NAND、3D XPoint等各类存储介质和主控讨论 |
汽车电子群 | MCU、电源、传感器等汽车电子讨论 |
光电器件群 | 光通信、激光器、ToF、AR、VCSEL等光电器件讨论 |
渠道群 | 存储和芯片产品报价、行情、渠道、供应链 |

< 长按识别二维码添加好友 >
加入上述群聊

带你走进万物存储、万物智能、
万物互联信息革命新时代

