点击上方“小麦大叔”,选择“置顶/星标公众号”
今年10月,特斯拉举办2022 AI Day活动,Tesla Bot人形机器人擎天柱(Optimus)原型机在全球精彩首秀。马斯克透露,该机器人产量应该可以达到数百万台,预估最终价格将在2万美元以下,3至5年间即可量产上市。

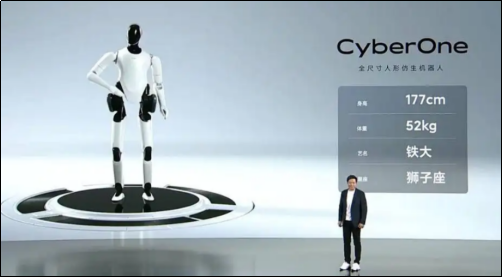
这是擎天柱(Optimus)第一次在无人操作的情况下自主行走,特斯拉没有为这款机器人安装外壳,而是直接将内部构造呈现出来,关节、骨骼、电缆等设备清晰可见。它能灵活地提起水壶浇花、双手搬运物料至目标位置、准确定位周围人员并主动避让。无独有偶,2022年8月11日,小米北京秋季新品发布会上,小米首款全尺寸人形仿生机器人CyberOne也正式亮相。
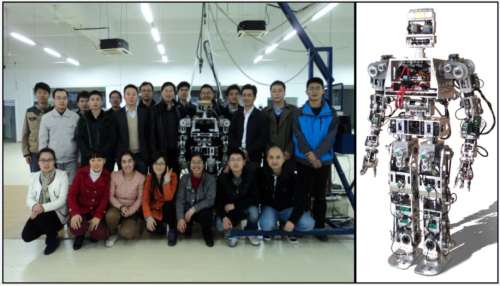
其实早在多年前,骆敏舟就带领技术团队研发出人形双足机器人,取名刑天—中国远古神话传说人物,手使一柄巨斧和盾牌,身强力壮,体型巨大的上古神人。刑天机器人长相酷似变形金刚,极其“吸睛”。不仅拥有类似人类的双足,还有完整的头颅、躯干。1.7m 的个子,却有34个自由度。它由20多位研发人员,在短短2-3年时间,自主研发而成。人形智能机器人在工业自动化、航空航天和社会服务中将发挥关键作用。人形机器人是一个复杂的光机电系统,具有多个自由度,运动操作更加灵活,非但能模拟人的结构与操作,甚至可以实现很多人类的行为与智能。因此为满足仿人需要,刑天身上采用了仿生机构设计、结构轻量化设计、多传感信息感知与融合、人机交互实时控制和多学科系统集成等关键技术。“它能实现对步伐的大小、快慢及幅度的控制。还具有典型环境和常见物体感知识别能力,能针对复杂地面环境自主规划路线、避障等。”
刑天主体采用高强度铝合金材料,能够实现轻量化,提高产品功重比,将伺服控制元件、执行元件、多传感检测元件高度集成,减小体积。在极限范围内进行测试,其关节驱动器单手最大抓取质量为 5 kg,这也是人形机器人必备的功能。要做到高达34个自由度(关节)的人形机器人,机电硬件(主要是电机及其驱动器+减速机)、运动软件算法的突破和迭代必不可少,下面我们展开讲讲刑天的“手-眼-足-脑”一体化关键技术。
▍动态平衡控制算法 实现双足稳定性行走
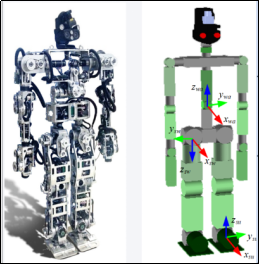
要保持机器人行走的稳定性,其核心是要有动态稳定性,为了使机器人在动态行走时保持重心的稳定,零力矩点(ZMP)必须落在支撑面内,所以双足机器人进行步态规划时必须要在ZMP理论的前提下,合理地规划踝关节和髋关节。这就要求机器人腿部应具备适当的机械柔顺性,从而有效缓解来自未知高刚度环境(地面、障碍物等)的碰撞冲击,保护机身及其附带电子设备,并有利于提高机器人运动稳定性。
技术团队研制的刑天机器人
因此,研发人员将人类的膝盖和其运动过程中所受的力线性化,从而学习如何让机器人膝盖使用更少的力来构建,让其能实现更好的力度控制,并让相关结构紧密包裹在膝盖周围。
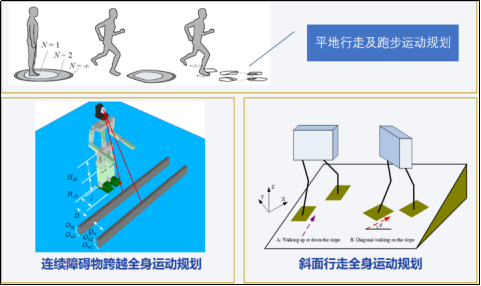
机器人步行动态稳定运动规划
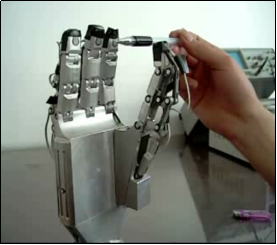
▍欠驱动多自由度手爪 实现自适应抓取
机器人手爪的关键在于:安全可靠性、自适应性和更高的智能性。安全可靠性研究确保整个机器人系统工作万无一失,因此,要求其手爪结构和控制系统要简单化。对于服务机器人手爪,需要提高通用性,使得手爪具备适应各种被抓物体形状的能力。而手爪智能化研究可以提高手爪决策的准确性,减少出错的可能性。刑天机器人还拥有仿人形自适应手爪与柔性末端夹持技术。它的“左右手”均为3指结构,每个手指可以旋转并抓握物体,单手最大抓取质量为5kg,采用欠驱动技术与柔性材料,能够自动适应不同类型的工件和不同场景的应用。这一核心科技,使其可以精确抓取和操作常见物体,在各种工业应用中大展身手,形象地说,装了手爪的机器人功能跟人手类似,让它搬砖块还是耍大刀,就完全要看专业认知和技能了,它可以广泛应用于诸如搬移、检测、焊接、贴标、喷涂、组装、锁螺钉等多种工业流程和应用场景。
▍多传感器信息融合 快速感知环境变化
如果说拥有了完整的躯干,还需要什么,那一双“慧眼”在智能机器人时代就显得尤为重要。刑天设计了一种结合双目立体相机与激光扫描仪的环境感知系统,可以实现双目图像的自动配准与分割,并能对图像中指定像素点的三维坐标进行测量,以实现仿人机器人所需的目标检测、识别、定位等功能。这使得其具有典型环境和常见物体感知识别能力,同时可以对行进路线进行自动规划,能够攀爬、自主避障、在崎岖路面行走,适应各种地面环境。针对复杂的工作环境,刑天还可采用人工遥控操作、紧急情况处理等自主管理相结合的半自主控制方式。刑天采用AI智能算法与高速控制芯片,提升嵌入式系统的响应速度,提高了重复定位精度;整体控制周期从 10 ms 缩短至 2 ms,自主化绝对值磁编码器,有效位数17位。研制基于3D视觉传感器与智能相机的智能抓取策略,实现对杂乱无章的物料进行精准识别,实现机器人准确抓取,并开发出基于深度学习缺陷识别算法,可以说是“脑力担当”。刑天机器人曾在全世界100多个队中,获得参加美国国防部DARPA举办的国际机器人挑战赛(DRC)资格,实现了整个机器人系统有机集成,突破环境识别、自主行走、任意抓取等多项关键技术。
▍钻坚研微,百折不挠 刑天机器人的后续开发
江苏省产业技术研究院智能制造技术研究所(集萃智造)在刑天机器人技术基础上,继续研制液压四足机器人,突破微小型旋转直驱伺服阀、恒转矩高功重比驱动电机、微小型高速高压轴向柱塞泵等核心部件研制的关键技术;开展高频响伺服驱动非线性控制研究,实现刚度补偿与高动态纠偏矫正;研究低液动力结构优化与球副抗磨损工艺,实现高功功率密度驱动系统,解决高功率密度驱动的“卡脖子技术”问题。采用钛合金与有机材料复合3D打印技术,进行耐瞬态高压的仿血管流道设计,实现液压能量的轻量化和集成化分布式传输;显著提高足式机器人的爆发力、负载能力和越障能力。
液压四足机器人
▍超10万亿市场“大蛋糕”等待分食
那么,在“机器换人”的趋势下,人形机器人有着多大市场空间?
根据马斯克 在 2022 年 4 月的 TED 演讲,Optimus 的单价大约 2.5 万美元 (约 16.75 万元人民币),有望进入家庭作业、快速配送、工业生产等各种消费级和商业级场景。到 2030 年,全球约有 4 亿个工作岗位将被自动化机器人取代,按20%渗透率测算,全球人形机器人市场空间约 12-16 万亿元。
面对庞大的商业化“蛋糕”,巨头纷纷开始行动,小米也发布了首款全尺寸人形仿生机器人——“CyberOne”, 成本约60-80万人民币。国内同样拥有庞大的市场空间。根据IFR和中国电子学会数据,尽管人形机器人处于起步阶段,参照其他电子产品,渗透率超过20%后将爆发式增长。按23-30年CAGR 30%测算到2030年,我国人形机器人市场规模约为8700亿元。
人形机器人是一项需要长期投入的复杂技术,在早期商业化程度不高的阶段,想要打造一台人形机器人,就意味着企业要具备一系列核心技术的研发能力,如伺服驱动器、机械传动、运动规划与控制、计算机视觉与感知、智能语音交互、SLAM与导航、人机交互和手眼协调等核心技术。而短短两三年的时间,刑天机器人能够诞生,从工程技术上来说是非常硬核的,尤其是在突破了仿生机构设计、结构轻量化设计、多传感信息感知与融合、人机交互实时控制和多学科系统集成等关键技术方面,能够让人眼前一亮。刑天机器人在复杂环境下多任务作业、自主行走等功能方面处于国际先进水平,可以有效扩展人类的工作能力,是未来关注和发展的重点,我们相信在将来,人形机器人或许会得到数量级的提升。版权声明:本文来源网络,版权归原作者所有。版权问题,请联系删除。
—— 往期推荐 ——
太卷了!为随时随地敲代码,他手撸了一台Linux掌上电脑
点击上方名片关注我