--关注回复“SOA”--
↓↓领取:面向智能车辆开发的开放性SOA方案↓↓
小时候学自行车,当知道爷爷奶奶在后面扶着的时候,我们通常会肆无忌惮的上路,那一刻宛如赛车手转世。但是爷爷奶奶清楚,拽在手里的风筝永远飞不远,于是乎在某个路口,默默地松开了手。在不知情的时候,我们一般还能嘚瑟个十几二十米,但当意识到靠山已没有的时候,踉踉跄跄之后就要摔跤。
现在的自动驾驶公司像极了小时候学自行车的我们,车上的安全员就是自动驾驶公司心中的“定海神针”。在有安全员的时候,自动驾驶系统做得再烂,也不妨碍顶着奇葩造型的车辆在马路上游走闲逛。毕竟一切应付不了的工况,都可以请求车内安全员去“擦屁股”。虽然每家公司都在喊着全无人,但大部分自动驾驶公司就是迟迟不肯迈开那条“腿”。但社会主义市场经济的好处就是,竞争对手会教会你怎样做人。在各地陆续出台鼓励全无人的政策后,部分头部自动驾驶公司已经开启了全无人的商业化试点运营。这个时候,如果其它公司不去跟进,恐怕下一轮的融资PPT不太好写。但别怕,今天不是来揭露隐秘在行业角落里的这些灰暗,而是想正经聊一下自动驾驶下一阶段的重头戏——全无人与远程驾驶。全无人,不仅需要勇气,还需要底气。而勇气和底气都来自于一套完整的技术保障,包括单车智能、安全冗余和远程驾驶。单车智能足够强可以尽量减少不能处理的复杂工况及长尾问题,安全冗余足够硬可以在系统失效或车辆故障后提供完善的最小风险策略。具备这两项能力,足以保证自动驾驶车辆在绝大多数场景下行得放心,停得安心。但是“老虎也有打盹的时候”,光具备前两项能力还不足以撑起全无人的雄心壮志。正如国外一家自动驾驶公司Voyage认为:“无论你的自动驾驶系统多么出色,它都会遇到不知道如何决策的新颖情况。即使在诸如圣何塞乡村之类的较为平静的社区中,我们的自动驾驶车辆也总有新的交通状况需要处理,建筑地带,装箱车,混乱的停车场,甚至火鸡!”解决这种困境有方法有三种。第一种是死等,直到自动驾驶系统优秀到可以应付99.99999……%的场景,但这可能要花费十几二十年时间。即便如此,多年之后,人们仍将面临如何处理自动驾驶车辆无法处理的0.0000……1%场景的挑战;第二种是派人去抢修,如同120急救一样,抢救是否及时到位全看距离急救点位置以及道路通畅情况。第三种是采用如图1所示的方法,在云端重建车辆行驶环境,让云端安全员像在实车上一样了解车辆的驾驶情况和环境情况,并在需要接管时将控车指令实时发送到车端,实现远程实时控车的功能。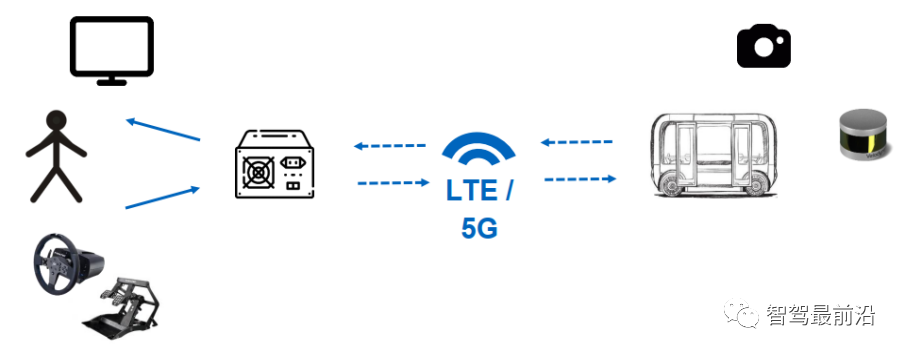
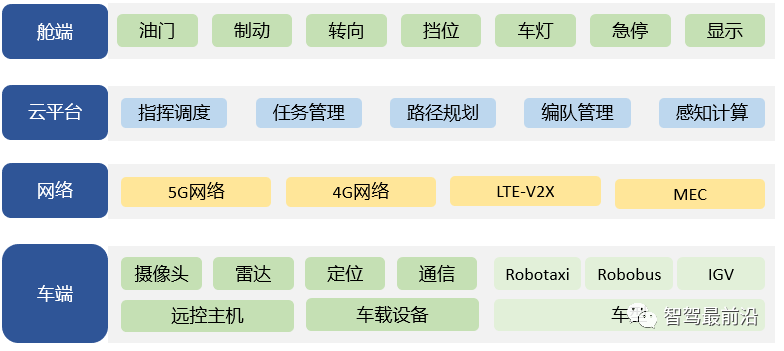
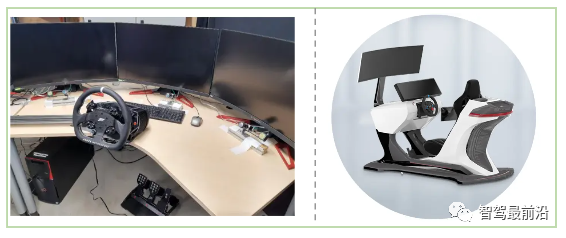
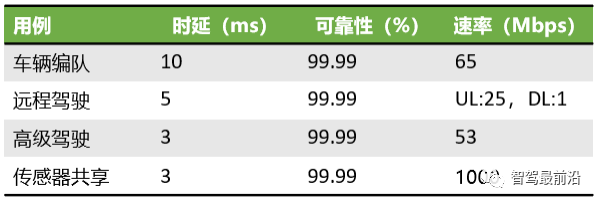
三种方法对比,高下立判。远程驾驶作为自动驾驶走向全无人商业化运营的重要保障,是各家自动驾驶公司必须修炼的一门基本武功,是自动驾驶全无人考卷中的一道“答题”。我甚至想下个武断的结论:“看这家自动驾驶公司具不具备全无人商业化运营的能力,先看他有没有一套完善的远程驾驶体系”。远程驾驶除了在自动驾驶领域将有所作为外,还必将在安全作业领域成就一番事业。如上所述,相当长一段时间,自动驾驶都将与小数点后可以做到几个9的安全而缠斗,而这个过程远程驾驶将肩负起拯救自动驾驶于危难中的“超人”。在超出ODD、系统异常、车辆故障等特殊情况下接管车辆并远程控制车辆恢复正常行驶或操控车辆到安全区域停车,进而辅助自动驾驶车辆测试、运营,从而提高自动驾驶系统的安全性和可靠性,减少了交通事故和人员伤亡,加速自动驾驶的落地。同时依托远程驾驶平台,可以实时监测自动驾驶车辆状态、自动驾驶系统状态、自动驾驶车队运营效率等内容,对故障做到早发现早治疗,对懈怠做到早察觉早鞭策。从而提高自动驾驶车辆运行效率、降低运营成本。而对于内部开发和运营来说,远程驾驶可以为算法开发及验证、数据采集及分析,提供极大的便利性。现场测试兄弟不再需要凌晨等待家里开发兄弟的测试指令,家里开发兄弟也不会因为联系不上现场测试兄弟而抓耳挠腮。远程驾驶也可以称得上开发和测试的好兄弟、好帮手。2022年夏天的持续破纪录高温有目共睹,当我们白天在中央空调底下喝着茶、写着文档、敲着代码依旧喊热的时候,你可知道下午2点钟工地中开着挖掘机师傅的感受。高温可能还可以忍受,但操纵工程机械在危险隧道、着火森林等高危环境施工的时候,你可知道师傅老婆孩子的感受。而借助远程驾,可以让师傅们云端操纵工程机械工作在抗震救灾、有毒环境、危险隧道、灭火救援、悬崖开路、爆炸现场清理等危险恶劣环境。不仅可以高效完成施工救援作业,还可以让师傅们像办公室白领一样在工作在舒适、安全的环境中。远程驾驶架构主要由车端、舱端、云平台和网络四部分组成,一个典型的架构如图2所示。工作时,车端传感器的感知数据以及车辆自身状态、位姿信息等通过网络传输给舱端显示系统进行显示和位姿随动。舱端中远程驾驶员基于显示的信息进行驾驶决策,并通过操控方向盘、油门踏板、刹车踏板、挡位等模拟器触发驾驶信号,驾驶信号由云平台处理后通过网络传给车端。车端远控主机收到信号后进行控制命令解算,并将解算后的控制命令发送给车端执行器执行,从而实现一个完整的远控驾驶闭环过程。车端主要包括感知设备、控制设备、通信设备和执行设备等。(1)当前远程驾驶系统中感知设备以摄像头为主,辅以原车上的毫米波雷达、激光雷达、组合导航等设备,主要用来提供车辆周围环境的实时状态信息,给舱端远程驾驶员提供一个良好的驾驶视野。(2)控制设备一般指车上的远控主机,主要承担两部分工作。一部分是将云平台发送过来的车辆操纵指令,转化为整车可使用的线控指令(方向盘转角、油门踏板开度等);另一部分是用来将感知设备采集的感知数据,以及车辆自身状态、位姿信息进行处理打包,发送给云平台。控制设备通常还承担自动驾驶、远控驾驶、有人驾驶模式的切换策略。(3)通信设备可以是一个单独的零件,也可以将功能集成在整车其它控制器中,负责的是将车端的数据上传到云平台,以及接收云平台下发的数据。(4)执行设备是远控操作指令的最终执行者,包括线控转向、线控制动、线控档位、车身喇叭灯光等。舱端主要包括远程驾驶模拟舱、显示系统、舱端服务器和备份急停系统等。(1)远程驾驶模拟舱是比较有花头和搞头的地方,朴素的方案是将方向盘、油门踏板、刹车踏板、档杆、信号采集系统、运动平台等简单组成在一起,如图3左图所示。富裕一点的方案是在此基础上加入一些工业设计的考虑,提高舒适性,如图3右图所示。奢华一点的方案可能还可以加上六自由度的运动平台,增加沉浸式驾驶体验。远程驾驶员在驾驶模拟舱可以像真实开车一样,操纵各种模拟器。信号采集系统采集处理后,将物理信号转换为车端可匹配的执行信号,并打包发送给舱端服务器。(2)显示系统主要用来显示车端的360°感知数据以及车辆状态和姿态信息,远程驾驶员可基于显示信息进行后续的远程驾驶操纵。(3)舱端服务器是舱端的大脑。针对车端摄像头的感知数据,需要舱端服务器解码渲染后传输到显示系统中。同时为了使显示方案更友好、远程驾驶员观察视频更加舒适,还需要对图像进行去畸变、拼接等处理;远程驾驶员的操纵指令也需要舱端服务器进行处理下发。(4)备份急停系统使用独立的通信链路,在主网络出现问题后,可在紧急情况下将车辆远程停下,提高远程驾驶系统的安全性和可靠性。(1)调度功能可以实现一个远程驾驶模拟舱对多辆车的远程驾驶接管任务,从而大大提升远程驾驶的工作效率。云平台的各类服务场景可根据目标车辆的实际作业需求进行设计,包含单车接管、车队调度中的接管等不同策略。(2)云平台作为应用的总入口,承接各类信息回传和指令下发,需要对网络质量进行全方位监测,实时规划为业务规划网络路径,提供可靠的保障。网络是基于V2X和5G系统构建车与车、车与云平台之间的信息传输。作为信息处理主要节点,5G系统基于基站、核心网、MEC 等节点实现控制数据、状态数据的传输。V2X主要实现车与车之间、车与路之间感知信息的传输。5G R16中对远程驾驶网络通信指标做了如表1所示要求。2022年7月,北京正式开放中国首个主驾无人的出行服务商业化试点。目前,百度和小马智行成为首批获许企业,将在经开区核心区60平方公里范围内投入30辆主驾无人的车辆,开展常态化收费运营服务。业内一片欢腾,普遍认为此举将自动驾驶的商业化落地推向了新的台阶。未曾想,重庆、武汉紧随其后,憋了一个更大的招:主驾、副驾、后排的安全员全部取消。2022年8,重庆、武汉两地政府部门率先发布自动驾驶全无人商业化试点政策,并向百度发放全国首批无人化示范运营资格,允许车内无安全员的自动驾驶车辆在社会道路上开展商业化服务。当业内都在羡慕重庆、武汉两地居民可以首先享受到全无人驾驶出行服务时,都在期望将两地将成功经验推广至全国的时候,交通运输部迅速站出来又加了点柴火。2022年8月8日下午,交通运输部在官网发布了《自动驾驶汽车运输安全服务指南(试行)》(征求意见稿)(以下简称《指南》)公开征求意见的通知。《指南》中明确:从事运输经营的完全自动驾驶汽车应当配备远程驾驶员或安全员。至此,远程驾驶写进了自动驾驶官方的要求中,国内轰轰烈烈的全无人自动驾驶也拉开了商业化运营的序幕。现在我们来看下美国这边。2022年4月,美国加州车管所(Department of Motor Vehicles,DMV)发布了最新的自动驾驶路测政策:将允许通过考核的自动驾驶公司开启车内无人监管的道路测试。DMV同时也给出了解释:无车内安全员的自动驾驶测试资格将只会颁发给产品符合SAE标准L4与 L5资格的公司,并且汽车能够严格满足安全操作需求,否则申请将会被无情驳回。加州车辆管理局概述了获取自动驾驶许可的必要条件,其中包括抵御网络攻击的适当安全措施、双向通信设备,以及车辆不能在某些指定区域和条件以外自主运行等。据悉,4月2日政策失效后,所有50多家在加州测试无人车的公司中,只有一家提出了测试纯无人车的申请。中美之间关于自动驾驶高地的争夺,会愈加紧张和激烈。2021年12月,希迪智驾在2021中部(长沙)人工智能产业博览会推出行业内首台正向开发的远程驾驶舱,如图4所示。远程驾驶舱前有3块显示屏,从左至右分别显示着车辆所在环境的平面图,车辆信息、参数、精确到经纬度的位置,车辆前后窗的视角,以及360度环视车辆周边的影像。据称,这款远程驾驶舱已应用于金川井下远程遥控矿卡和句容台泥的无人驾驶矿卡。2022年7月,慧拓发布远程驾驶系统Avatar Driver旗舰版,如图5所示。该系统配备了符合人体工学的电动自调式座椅、工业级方向盘,灵活开合的屏幕和可调整受力效果的工业级踏板。据称,该套系统伴随其矿山无人驾驶项目的落地也得到了充分的验证。可以看到,封闭场景作为率先实现自动驾驶全无人商业运营的场景,已经在远程驾驶上做了部分有意义的探索工作。随着开放道路全无人自动驾驶的到来,远程驾驶也必将迎来一波技术和产品的创新。自动驾驶全无人的考卷已经徐徐展开,远程驾驶的这道“大题”,不知道各家自动驾驶公司能得几分。https://zhuanlan.zhihu.com/p/533196649转载自十一号组织,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --