
原文链接:https://blog.csdn.net/qq_36413982/article/details/103836946
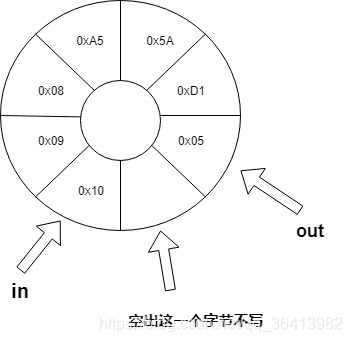
码代码的应该学数据结构都学过队列。环形队列是队列的一种特殊形式,应用挺广泛的。因为有太多文章关于这方面的内容,理论知识可以看别人的,下面写得挺好的:STM32进阶之串口环形缓冲区实现
typedef struct ringBuff{
unsigned int in; //写入的位置
unsigned int out; //读出的位置
unsigned char buffer[RING_BUFF_SIZE]; //数据域
}stRingBuff;
/**
- @brief: 寫一字節的數據到環形隊列
- @param[in]: None
- @retval[out]: None
- @note:
- @author: AresXu
- @version: v1.0.0
*/
char WriteOneByteToRingBuffer(stRingBuff *ringBuf,char data)
{
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
if(IsRingBufferFull(ringBuf)) //写之前先判断队列是否写满
{
return FALSE;
}
ringBuf->buffer[ringBuf->in] = data;
ringBuf->in = (++ringBuf->in) % RING_BUFF_SIZE; //防止越界
return TRUE;
}
写入数据时要判断队列是否满,满了肯定就不能写入。
/**
- @brief: 判斷環形隊列是否满
- @param[in]: None
- @retval[out]: None
- @note:
- @author: AresXu
- @version: v1.0.0
*/
bool IsRingBufferFull(stRingBuff *ringBuf)
{
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
if(((ringBuf->in+1) % RING_BUFF_SIZE) == ringBuf->out)
{
// printf("Ring buffer is Full\r\n");
return TRUE;
}
return FALSE;
}
当写满时,读写位置也是相等,无法判断是否写满。这种情况有两种办法解决:
数据结构增加一个变量来计数写入数据的个数
像这种((ringBuf->in+1) % RING_BUFF_SIZE) == ringBuf->out,空出一个字节来不写数据
/**
- @brief: 从環形隊列中读一字节数据
- @param[in]: None
- @retval[out]: None
- @note:
- @author: AresXu
- @version: v1.0.0
*/
char ReadOneByteFromRingBuffer(stRingBuff *ringBuf,char *data)
{
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
if(IsRingBufferEmpty(ringBuf)) //读之前判断队列是否为空
{
return FALSE;
}
*data = ringBuf->buffer[ringBuf->out];
ringBuf->out = (++ringBuf->out) % RING_BUFF_SIZE; //防止越界
return TRUE;
}
/**
- @brief: 判斷環形隊列是否空
- @param[in]: None
- @retval[out]: None
- @author: AresXu
- @version: v1.0.0
*/
bool IsRingBufferEmpty(stRingBuff *ringBuf)
{
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
if(ringBuf->in == ringBuf->out) //写入位置和读出位置相等时为空
{
// printf("Ring buffer is Empty\r\n");
return TRUE;
}
return FALSE;
}
/**
* @brief: 寫len個字節數據到環形隊列
* @param[in]: None
* @retval[out]: None
* @note:
* @author: AresXu
* @version: v1.0.0
*/
void WriteRingBuffer(stRingBuff *ringBuf,char *writeBuf,unsigned int len)
{
unsigned int i;
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
for(i = 0; i < len; i++)
{
WriteOneByteToRingBuffer(ringBuf,writeBuf[i]);
}
}
/**
* @brief: 從環形隊列讀出len個字節的數據
* @param[in]: None
* @retval[out]: None
* @note:
* @author: AresXu
* @version: v1.0.0
*/
void ReadRingBuffer(stRingBuff *ringBuf,char *readBuf,unsigned int len)
{
unsigned int i;
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
for(i = 0; i < len; i++)
{
ReadOneByteFromRingBuffer(ringBuf,&readBuf[i]);
}
}
/**
* @brief: 獲取已經寫入的長度
* @param[in]: None
* @retval[out]: None
* @note:
* @author: AresXu
* @version: v1.0.0
*/
int GetRingBufferLength(stRingBuff *ringBuf)
{
if (ringBuf == NULL)
{
printf("pointer is null\r\n");
return;
}
return (ringBuf->in - ringBuf->out + RING_BUFF_SIZE) % RING_BUFF_SIZE;
}
画个图,画画就可以知道为什么这样可以判断写入的长度。
static stRingBuff g_stRingBuffer = {0,0,0};
static u8 g_recvFinshFlag = 0;
stRingBuff *GetRingBufferStruct(void)
{
return &g_stRingBuffer;
}
u8 *IsUsart1RecvFinsh(void)
{
return &g_recvFinshFlag;
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
res = USART_ReceiveData(USART1); //读取接收到的数据
WriteOneByteToRingBuffer(GetRingBufferStruct(),res);
}
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) //空闲中断
{
USART_ReceiveData(USART1); //清除空闲中断
g_recvFinshFlag = 1; //接收完成
}
}
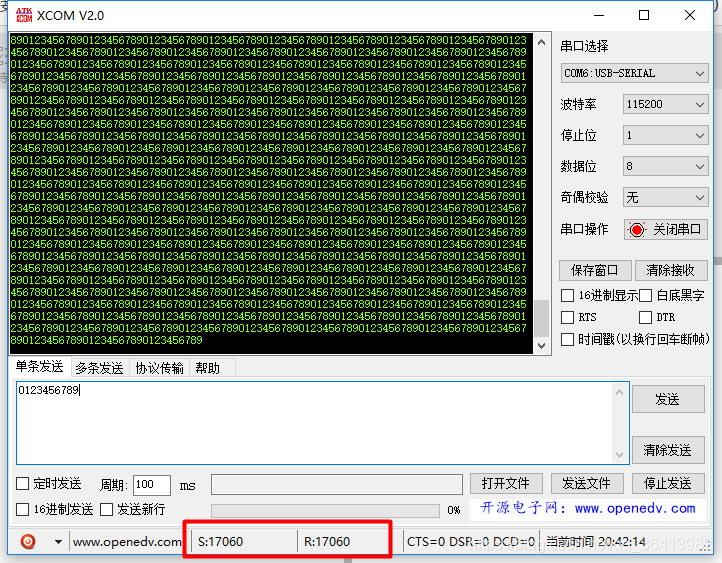
int main(void)
{
char readBuffer[100];
u16 t;
u16 len;
u16 times = 0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
KEY_Init(); //初始化与按键连接的硬件接口
while(1)
{
times++;
if(*IsUsart1RecvFinsh())
{
ReadRingBuffer(GetRingBufferStruct(),readBuffer,GetRingBufferLength(GetRingBufferStruct()));
printf("%s",readBuffer);
memset(readBuffer,0,100);
*IsUsart1RecvFinsh() = 0;
}
if(times%500==0)
LED0=!LED0;
delay_ms(1);
}
}
版权声明:本文来源网络,免费传达知识,版权归原作者所有。如涉及作品版权问题,请联系我进行删除。
注意
由于微信公众号近期改变了推送规则,为了防止找不到,可以星标置顶,这样每次推送的文章才会出现在您的订阅列表里。
猜你喜欢:
嵌入式设备AP配网实例分享
嵌入式Linux单板连接飞燕物联网平台
分享一种灵活性很高的协议格式(附代码例子)
嵌入式大杂烩周记 | 第 16 期
嵌入式大杂烩周记 | 第 15 期
访问非法内存为什么不会出错?
嵌入式大杂烩周记 | 第 14 期
分享几个实用的代码片段(第二弹)
分享一种你可能不知道的bug定位方法
分享一种修改配置文件的方法
《嵌入式大杂烩周记第 13 期:lz4》
《嵌入式并行多线程处理器,了解一下!》
《分享一种修改配置文件的方法》
《分享几个实用的代码片段(附代码例子)》
《废旧板子再利用:搭建无线调试环境!》
《嵌入式段错误的3种调试方法汇总!》
《简说TCP通信非阻塞接收(附代码例子)》
《TCP通信常用接口的使用封装》
《嵌入式软件中,总线错误的坑?替大家先踩一步》
《分享嵌入式软件调试方法及几个有用的工具!》
《分享两点提高编程能力的建议!》
在公众号聊天界面回复1024,可获取嵌入式资源;回复 m ,可查看文章汇总
