本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下:
第一篇:蓝牙综合介绍 ,主要介绍蓝牙的一些概念,产生背景,发展轨迹,市面蓝牙介绍,以及蓝牙开发板介绍。
第二篇:Transport层介绍,主要介绍蓝牙协议栈跟蓝牙芯片之前的硬件传输协议,比如基于UART的H4,H5,BCSP,基于USB的H2等
第三篇:传统蓝牙controller介绍,主要介绍传统蓝牙芯片的介绍,包括射频层(RF),基带层(baseband),链路管理层(LMP)等
第四篇:传统蓝牙host介绍,主要介绍传统蓝牙的协议栈,比如HCI,L2CAP,SDP,RFCOMM,HFP,SPP,HID,AVDTP,AVCTP,A2DP,AVRCP,OBEX,PBAP,MAP等等一系列的协议吧。
第五篇:低功耗蓝牙controller介绍,主要介绍低功耗蓝牙芯片,包括物理层(PHY),链路层(LL)
第六篇:低功耗蓝牙host介绍,低功耗蓝牙协议栈的介绍,包括HCI,L2CAP,ATT,GATT,SM等
第七篇:蓝牙芯片介绍,主要介绍一些蓝牙芯片的初始化流程,基于HCI vendor command的扩展
第八篇:附录,主要介绍以上常用名词的介绍以及一些特殊流程的介绍等。
另外,开发板如下所示,对于想学习蓝牙协议栈的最好人手一套。以便更好的学习蓝牙协议栈,相信我,学完这一套视频你将拥有修改任何协议栈的能力(比如Linux下的bluez,Android下的bluedroid)。
------------------------------------------------------------------------------------------------------------------------------------------
蓝牙交流扣扣群(已满):970324688
蓝牙交流扣扣群:765961169
Github代码:https://github.com/sj15712795029/bluetooth_stack
------------------------------------------------------------------------------------------------------------------------------------------
步骤1:发送HCI Reset command,等待芯片回复
步骤2: 提升uart波特率,准备下载固件
步骤3: 读取芯片名称,匹配固件名称
步骤4:告知芯片准备下载固件
步骤5:Write RAM
步骤6:Launch RAM
步骤7:降低串口波特率,重新发送HCI reset
步骤8: 提升uart波特率,准备后续交互command
步骤9:修改蓝牙地址
步骤10:告知协议栈下载固件完毕,协议栈进入正常初始化流程
下面我们就来一一介绍下具体的步骤:
在收到协议栈给vendor发送的BT_VND_OP_FW_CFG opcode后,执行hw_config_start后发送hci reset
void hw_config_start(void)
{
HC_BT_HDR *p_buf = NULL;
uint8_t *p;
hw_cfg_cb.state = 0;
hw_cfg_cb.fw_fd = -1;
hw_cfg_cb.f_set_baud_2 = FALSE;
/* Start from sending HCI_RESET */
if (bt_vendor_cbacks)
{
p_buf = (HC_BT_HDR *) bt_vendor_cbacks->alloc(BT_HC_HDR_SIZE \
HCI_CMD_PREAMBLE_SIZE);
}
if (p_buf)
{
p_buf->event = MSG_STACK_TO_HC_HCI_CMD;
p_buf->offset = 0;
p_buf->layer_specific = 0;
p_buf->len = HCI_CMD_PREAMBLE_SIZE;
p = (uint8_t *) (p_buf 1);
UINT16_TO_STREAM(p, HCI_RESET);
*p = 0; /* parameter length */
hw_cfg_cb.state = HW_CFG_START;
bt_vendor_cbacks->xmit_cb(HCI_RESET, p_buf, hw_config_cback); // 通过HCI接口发送HCI reset
}
else
{
if (bt_vendor_cbacks)
{
ALOGE("vendor lib fw conf aborted [no buffer]");
bt_vendor_cbacks->fwcfg_cb(BT_VND_OP_RESULT_FAIL);
}
}
}也就是btsnoop中的packet 1~2

NOTED:此命令是标准的HCI command,一般芯片都要在初始化的时候下一个HCI reset的command
① 代码分析
在发送完毕步骤1的HCI Reset后,我们会进入hw_config_cback callback函数中,通过hw_cfg_cb.state我们进入以下case
case HW_CFG_START:
if (UART_TARGET_BAUD_RATE > 3000000)
{
/* set UART clock to 48MHz */
UINT16_TO_STREAM(p, HCI_VSC_WRITE_UART_CLOCK_SETTING);
*p = 1; /* parameter length */
*p = 1; /* (1,"UART CLOCK 48 MHz")(2,"UART CLOCK 24 MHz") */
p_buf->len = HCI_CMD_PREAMBLE_SIZE 1;
hw_cfg_cb.state = HW_CFG_SET_UART_CLOCK;
is_proceeding = bt_vendor_cbacks->xmit_cb( \
HCI_VSC_WRITE_UART_CLOCK_SETTING, \
p_buf, hw_config_cback);
break;
}
/* fall through intentionally */
case HW_CFG_SET_UART_CLOCK:
/* set controller's UART baud rate to 3M */
UINT16_TO_STREAM(p, HCI_VSC_UPDATE_BAUDRATE);
*p = UPDATE_BAUDRATE_CMD_PARAM_SIZE; /* parameter length */
*p = 0; /* encoded baud rate */
*p = 0; /* use encoded form */
UINT32_TO_STREAM(p, UART_TARGET_BAUD_RATE);
p_buf->len = HCI_CMD_PREAMBLE_SIZE \
UPDATE_BAUDRATE_CMD_PARAM_SIZE;
hw_cfg_cb.state = (hw_cfg_cb.f_set_baud_2) ? \
HW_CFG_SET_UART_BAUD_2 : HW_CFG_SET_UART_BAUD_1;
is_proceeding = bt_vendor_cbacks->xmit_cb(HCI_VSC_UPDATE_BAUDRATE, \
p_buf, hw_config_cback);
break;由于我们设定的UART_TARGET_BAUD_RATE是3M,所以我们跑到case HW_CFG_SET_UART_CLOCK中,所以我们可以看到改变波特率的HCI VS command的组包过程
UINT16_TO_STREAM(p, HCI_VSC_UPDATE_BAUDRATE);
*p = UPDATE_BAUDRATE_CMD_PARAM_SIZE; /* parameter length */
*p = 0; /* encoded baud rate */
*p = 0; /* use encoded form */
UINT32_TO_STREAM(p, UART_TARGET_BAUD_RATE);其中几个宏定义为:
#define HCI_VSC_UPDATE_BAUDRATE 0xFC18
#define UPDATE_BAUDRATE_CMD_PARAM_SIZE 6
#define UART_TARGET_BAUD_RATE 3000000以上是发送串口波特率的HCI vs command,但是别忘了,我们收到command complete后要改变本地的驱动的波特率,代码如下:
userial_vendor_set_baud( \
line_speed_to_userial_baud(UART_TARGET_BAUD_RATE) \至此,芯片以及驱动层面的波特率都改变完毕了!
② 命令格式分析
NOTED:这里询问过CYW,暂时无法拿到4349的VS command & event文档,所以无法截图,但是看code来说一共有6个byte:
1个byte的encoded baud rate 1个byte的use encoded form 4个byte的波特率
也就是btsnoop中的packet 3~4

读取芯片名称,NOTED:这个是标准的HCI commmand
① 代码分析
/* read local name */
UINT16_TO_STREAM(p, HCI_READ_LOCAL_NAME);
*p = 0; /* parameter length */
p_buf->len = HCI_CMD_PREAMBLE_SIZE;
hw_cfg_cb.state = HW_CFG_READ_LOCAL_NAME;
is_proceeding = bt_vendor_cbacks->xmit_cb(HCI_READ_LOCAL_NAME, \
p_buf, hw_config_cback);然后匹配到config patch的文件名称
也就是btsnoop中的packet 5~6

找到芯片名称,匹配到fireware后,host会给controller下一个HCI VS command,这个command的作用是告知controller,我们准备要下载fw了
① 代码分析
/* vsc_download_minidriver */
UINT16_TO_STREAM(p, HCI_VSC_DOWNLOAD_MINIDRV);
*p = 0; /* parameter length */
p_buf->len = HCI_CMD_PREAMBLE_SIZE;
hw_cfg_cb.state = HW_CFG_DL_MINIDRIVER;
is_proceeding = bt_vendor_cbacks->xmit_cb( \
HCI_VSC_DOWNLOAD_MINIDRV, p_buf, \
hw_config_cback);其中HCI_VSC_DOWNLOAD_MINIDRV的定义为:
#define HCI_VSC_DOWNLOAD_MINIDRV 0xFC2E② 命令格式分析
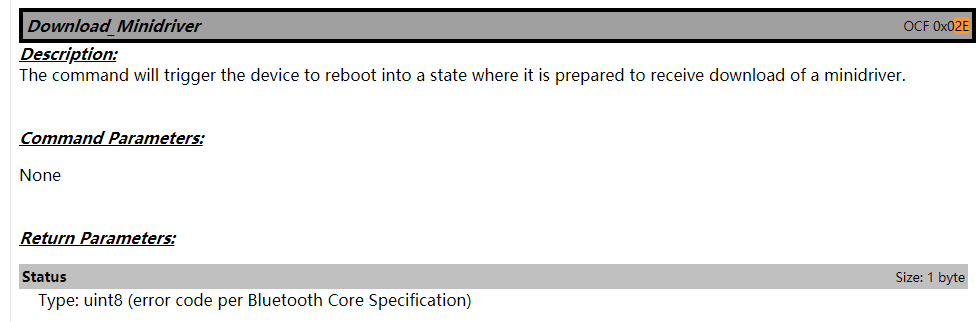
也就是btsnoop中的packet 7~8

收到Download Minnidriver的command complete后,会读取fireware文件来把数据从host下到controller中,代码如下:
p_buf->len = read(hw_cfg_cb.fw_fd, \
p HCI_CMD_PREAMBLE_SIZE,\
*(p HCD_REC_PAYLOAD_LEN_BYTE));
STREAM_TO_UINT16(opcode,p);
is_proceeding = bt_vendor_cbacks->xmit_cb(opcode, \
p_buf, hw_config_cback);② 命令格式分析

也就是btsnoop中的packet 9~782
通过Write RAM下载完固件后,通过Launch RAM来启动固件
NOTED:Write RAM跟Launch RAM这些都在firewware固件本身中
也就是btsnoop中的packet 783~784

① 代码分析
在收到lanuch ram后,降低波特率为115200,重新发送hci reset,流程如下:
/* Normally the firmware patch configuration file
* sets the new starting baud rate at 115200.
* So, we need update host's baud rate accordingly.
*/
ALOGI("bt vendor lib: set UART baud 115200");
userial_vendor_set_baud(USERIAL_BAUD_115200);
/* Next, we would like to boost baud rate up again
* to desired working speed.
*/
hw_cfg_cb.f_set_baud_2 = TRUE;
/* Check if we need to pause a few hundred milliseconds
* before sending down any HCI command.
*/
delay = look_up_fw_settlement_delay();
ALOGI("Setting fw settlement delay to %d ", delay);
ms_delay(delay);
p_buf->len = HCI_CMD_PREAMBLE_SIZE;
UINT16_TO_STREAM(p, HCI_RESET);
*p = 0; /* parameter length */
hw_cfg_cb.state = HW_CFG_START;
is_proceeding = bt_vendor_cbacks->xmit_cb(HCI_RESET, p_buf, hw_config_cback);也就是btsnoop中的packet 785~786

这里又通过HCI vs commad把波特率从115200提升到3M,然后收到command complete后把串口驱动的波特率提升
UINT16_TO_STREAM(p, HCI_VSC_UPDATE_BAUDRATE);
*p = UPDATE_BAUDRATE_CMD_PARAM_SIZE; /* parameter length */
*p = 0; /* encoded baud rate */
*p = 0; /* use encoded form */
UINT32_TO_STREAM(p, UART_TARGET_BAUD_RATE);
p_buf->len = HCI_CMD_PREAMBLE_SIZE \
UPDATE_BAUDRATE_CMD_PARAM_SIZE;
hw_cfg_cb.state = (hw_cfg_cb.f_set_baud_2) ? \
HW_CFG_SET_UART_BAUD_2 : HW_CFG_SET_UART_BAUD_1;
is_proceeding = bt_vendor_cbacks->xmit_cb(HCI_VSC_UPDATE_BAUDRATE, \
p_buf, hw_config_cback);
userial_vendor_set_baud(line_speed_to_userial_baud(UART_TARGET_BAUD_RATE));也就是btsnoop中的packet 787~788

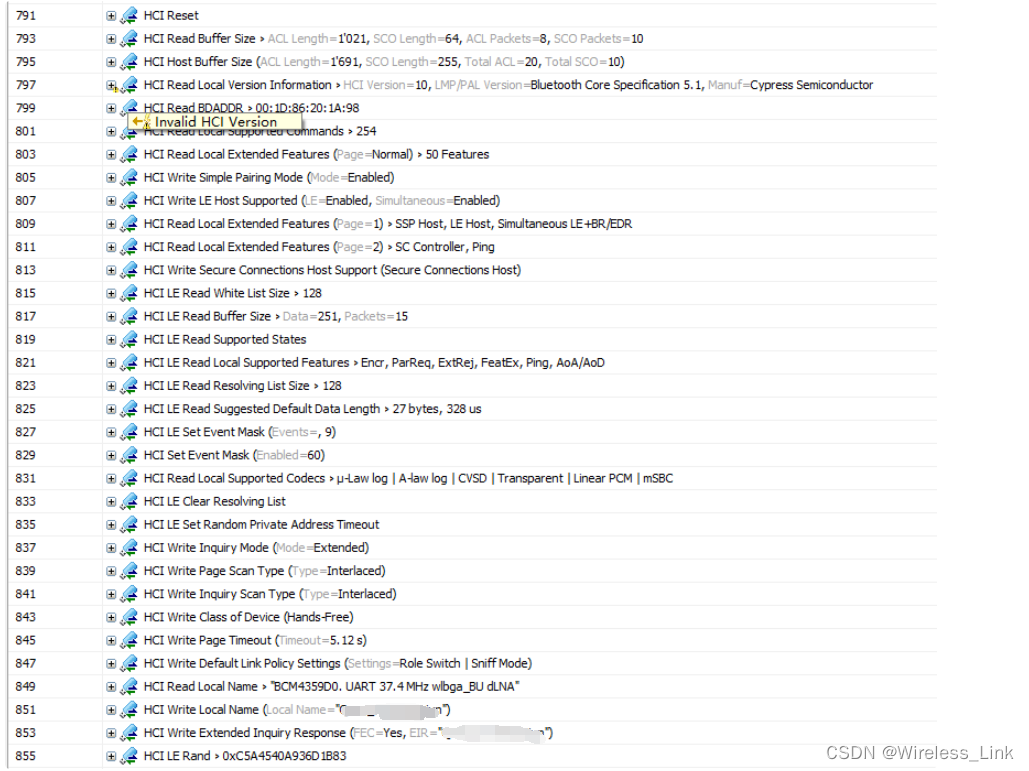
收到波特率改变成功的command complete的event后,我们通过HCI VS command来改变蓝牙地址
static uint8_t hw_config_set_bdaddr(HC_BT_HDR *p_buf)
{
uint8_t retval = FALSE;
uint8_t *p = (uint8_t *) (p_buf 1);
ALOGI("Setting local bd addr to X:X:X:X:X:X",
vnd_local_bd_addr[0], vnd_local_bd_addr[1], vnd_local_bd_addr[2],
vnd_local_bd_addr[3], vnd_local_bd_addr[4], vnd_local_bd_addr[5]);
UINT16_TO_STREAM(p, HCI_VSC_WRITE_BD_ADDR);
*p = BD_ADDR_LEN; /* parameter length */
*p = vnd_local_bd_addr[5];
*p = vnd_local_bd_addr[4];
*p = vnd_local_bd_addr[3];
*p = vnd_local_bd_addr[2];
*p = vnd_local_bd_addr[1];
*p = vnd_local_bd_addr[0];
p_buf->len = HCI_CMD_PREAMBLE_SIZE BD_ADDR_LEN;
hw_cfg_cb.state = HW_CFG_SET_BD_ADDR;
retval = bt_vendor_cbacks->xmit_cb(HCI_VSC_WRITE_BD_ADDR, p_buf, \
hw_config_cback);
return (retval);
}② 命令格式分析
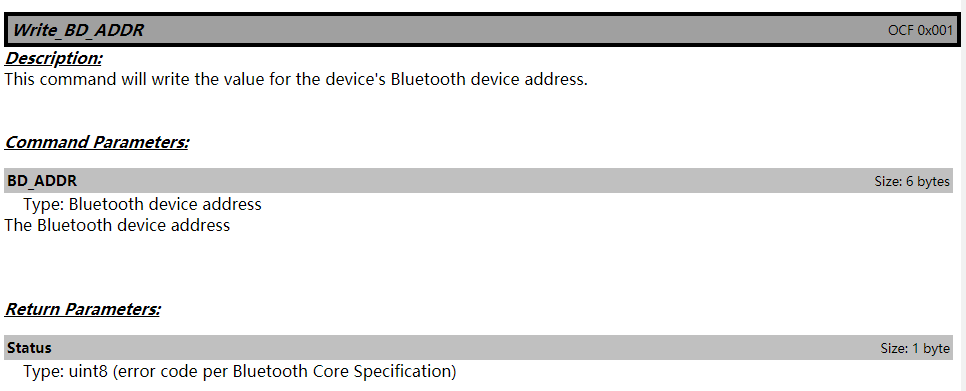
也就是btsnoop中的packet 787~788