

本文假设你有btsnoop的概念,会在以上基础上进行android 7的btsnoop的代码介绍,如果你没有btsnoop相关的基础,那么移步到大专兰看btsnoop的概念,再来看本文,协议栈大专栏以及btsnoop的相关的文章连接如下:
一篇文章足够你学习蓝牙技术,提供史上最全的蓝牙技术(传统蓝牙/低功耗蓝牙)文章总结,文档下载总结(2020/12/11更新)_Wireless_Link的博客-CSDN博客_蓝牙eir
蓝牙协议栈学习/开发利器-BTSNOOP介绍_Wireless_Link的博客-CSDN博客_btsnoop
本文通过以下几个内容来介绍下Android 7的btsnoop
1)btsnoop的分类
2)btsnoop的启动以及结束实现
3)btsnoop的写入实现以及调用
我们可以看到Android7的AOSP代码中有3中btsnoop的实现,分别是btsnoop,btsnoop_net,btsnoop_mem,下面我们就要分别介绍下:
此方式就是普通的btsnoop,把hci的数据写入到文件中,然后导出文件来查看,文件源码跟头文件分别是:
system/bt/hci/src/btsnoop.c
system/bt/hci/include/btsnoop.h
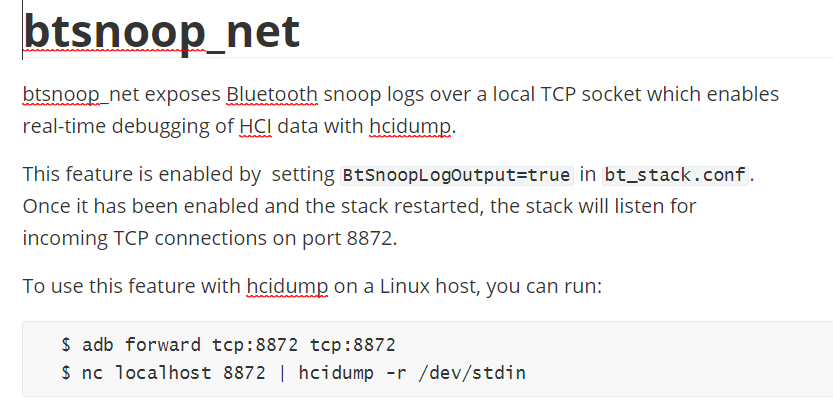
此方式是通过socket来调试btsnoop,这种方式会把hci数据写入到local host的tcp 8872端口上,然后配合自己敲的指令,来实时抓取log,文件源码是:
system/bt/hci/src/btsnoop_net.c
这个功能的使用文档在
system/bt/doc
此方式是通过把btsnoop的数据抓下来,在btif层保存到一个ring buffer中,然后通过dump的方式在通过dprintf打印出来!,文件源码跟头文件分别是:
system/bt/hci/src/btsnoop_mem.c
system/bt/hci/include/btsnoop_mem.h
btsnoop的启动分为以下几个步骤:
1)模块启动
2)模块启动的源码分析
下面我们就一一分析下以上几个步骤
Android的协议栈把很多功能都分成了一个个的子模块,叫做module,通过module_init来初始化,通过module_start_up来开始,通过module_shut_down来结束,module的实现不在本文章的讨论范围内,我们只需要知道模块提前根据以下结构体注册,然后每个函数指针调用到特定的函数即可!
typedef struct {
const char *name;
module_lifecycle_fn init;
module_lifecycle_fn start_up;
module_lifecycle_fn shut_down;
module_lifecycle_fn clean_up;
const char *dependencies[];
} module_t;btsnoop的module结构体如下:
EXPORT_SYMBOL const module_t btsnoop_module = {
.name = BTSNOOP_MODULE,
.init = NULL,
.start_up = start_up,
.shut_down = shut_down,
.clean_up = NULL,
.dependencies = {
STACK_CONFIG_MODULE,
NULL
}
};因为btsnoop没有init函数,只有startup跟shurdown函数,分别调用位置如下:
void bte_main_enable()
{
APPL_TRACE_DEBUG("%s", __FUNCTION__);
module_start_up(get_module(BTSNOOP_MODULE)); //模块启动
module_start_up(get_module(HCI_MODULE));
BTU_StartUp();
}void bte_main_disable(void)
{
APPL_TRACE_DEBUG("%s", __FUNCTION__);
module_shut_down(get_module(HCI_MODULE)); //模块结束
module_shut_down(get_module(BTSNOOP_MODULE));
BTU_ShutDown();
}btsnoop的startup函数实现如下:
static future_t *start_up(void) {
module_started = true;
update_logging();
return NULL;
}static void update_logging() {
bool should_log = module_started &&
(logging_enabled_via_api || stack_config->get_btsnoop_turned_on());
if (should_log == is_logging)
return;
is_logging = should_log;
if (should_log) {
btsnoop_net_open();
const char *log_path = stack_config->get_btsnoop_log_path();
// Save the old log if configured to do so
if (stack_config->get_btsnoop_should_save_last()) {
char last_log_path[PATH_MAX];
snprintf(last_log_path, PATH_MAX, "%s.%" PRIu64, log_path,
btsnoop_timestamp());
if (!rename(log_path, last_log_path) && errno != ENOENT)
LOG_ERROR(LOG_TAG, "%s unable to rename '%s' to '%s': %s", __func__, log_path, last_log_path, strerror(errno));
}
logfile_fd = open(log_path, O_WRONLY | O_CREAT | O_TRUNC, S_IRUSR | S_IWUSR | S_IRGRP | S_IWGRP | S_IROTH);
if (logfile_fd == INVALID_FD) {
LOG_ERROR(LOG_TAG, "%s unable to open '%s': %s", __func__, log_path, strerror(errno));
is_logging = false;
return;
}
write(logfile_fd, "btsnoop\0\0\0\0\1\0\0\x3\xea", 16);
} else {
if (logfile_fd != INVALID_FD)
close(logfile_fd);
logfile_fd = INVALID_FD;
btsnoop_net_close();
}
}startup主要是update_logging函数的实现,我们来分析一下
我们看到是否开启要依赖于should_log这个变量,这个变量为true就做一些动作,比如btsnoop写文件的open,btsnoop_net的开启,如果为false就做btsoop写文件的关闭以及btsnoop_net的关闭。
那么shoud_log都会依赖于什么呢?他的条件是这样的module_started && (logging_enabled_via_api || stack_config->get_btsnoop_turned_on());
首先会依赖于module_started ,我们可以看到btsnoop startup的时候就把这个设置为true了,那么其他两个条件是从什么地方而来呢?
logging_enabled_via_api
config_hci_snoop_log-》btsnoop_get_interface()->set_api_wants_to_log(enable)-》logging_enabled_via_api = value,可以看出来config_hci_snoop_log这个bluetooth.c中的hal实现,所以这个是跟上层jni调用,由上层来决定
那么stack_config->get_btsnoop_turned_on()这个条件呢?其中函数实现是get_btsnoop_turned_on
static bool get_btsnoop_turned_on(void) {
return config_get_bool(config, CONFIG_DEFAULT_SECTION, BTSNOOP_TURNED_ON_KEY, false);
}所以看代码我们可以得出他是从"/etc/bluetooth/bt_stack.conf" 配置文件中读取BtSnoopLogOutput的key value来决定。
基于以上条件,我们就能进入正式的开启文件等动作了,我们通过代码注释来解析
if (should_log) {
//btsnoop net的open,这个稍后分析
btsnoop_net_open();
// 通过/etc/bluetooth/bt_stack.conf配置文件的BtSnoopFileName value值来决定btsnoop的路径
// 默认路径是/data/misc/bluedroid/btsnoop_hci.log
const char *log_path = stack_config->get_btsnoop_log_path();
// 通过/etc/bluetooth/bt_stack.conf配置文件的BtSnoopSaveLog value值来决定是否保存上一次的
// btsnoop,这个功能主要是会把上一次的snoop修改名称,做一个备份
// Save the old log if configured to do so
if (stack_config->get_btsnoop_should_save_last()) {
char last_log_path[PATH_MAX];
snprintf(last_log_path, PATH_MAX, "%s.%" PRIu64, log_path,
btsnoop_timestamp());
if (!rename(log_path, last_log_path) && errno != ENOENT)
LOG_ERROR(LOG_TAG, "%s unable to rename '%s' to '%s': %s", __func__, log_path, last_log_path, strerror(errno));
}
// 常规的打开文件,保存路径就是我们上面从解析文件中得到的
logfile_fd = open(log_path, O_WRONLY | O_CREAT | O_TRUNC, S_IRUSR | S_IWUSR | S_IRGRP | S_IWGRP | S_IROTH);
if (logfile_fd == INVALID_FD) {
LOG_ERROR(LOG_TAG, "%s unable to open '%s': %s", __func__, log_path, strerror(errno));
is_logging = false;
return;
}
// 写btsnoop的file header format,里面值不懂的可以回头看看我们的btsnoop的概念
write(logfile_fd, "btsnoop\0\0\0\0\1\0\0\x3\xea", 16);
}现在回头来看看btsnoop_net的open
// 如果定义的宏,并且为TRUE,就创建一个现成,执行listen_fn_函数
void btsnoop_net_open() {
#if (!defined(BT_NET_DEBUG) || (BT_NET_DEBUG != TRUE))
return; // Disable using network sockets for security reasons
#endif
listen_thread_valid_ = (pthread_create(&listen_thread_, NULL, listen_fn_, NULL) == 0);
if (!listen_thread_valid_) {
LOG_ERROR(LOG_TAG, "%s pthread_create failed: %s", __func__, strerror(errno));
} else {
LOG_DEBUG(LOG_TAG, "initialized");
}
}
static void *listen_fn_(UNUSED_ATTR void *context) {
prctl(PR_SET_NAME, (unsigned long)LISTEN_THREAD_NAME_, 0, 0, 0);
// 创建一个TCP的socket
listen_socket_ = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);
if (listen_socket_ == -1) {
LOG_ERROR(LOG_TAG, "%s socket creation failed: %s", __func__, strerror(errno));
goto cleanup;
}
int enable = 1;
if (setsockopt(listen_socket_, SOL_SOCKET, SO_REUSEADDR, &enable, sizeof(enable)) == -1) {
LOG_ERROR(LOG_TAG, "%s unable to set SO_REUSEADDR: %s", __func__, strerror(errno));
goto cleanup;
}
// 设置IP地址为local host,也就是本地交互,设置端口号为8872
struct sockaddr_in addr;
addr.sin_family = AF_INET;
addr.sin_addr.s_addr = htonl(LOCALHOST_);
addr.sin_port = htons(LISTEN_PORT_);
if (bind(listen_socket_, (struct sockaddr *)&addr, sizeof(addr)) == -1) {
LOG_ERROR(LOG_TAG, "%s unable to bind listen socket: %s", __func__, strerror(errno));
goto cleanup;
}
// 启动socket监听
if (listen(listen_socket_, 10) == -1) {
LOG_ERROR(LOG_TAG, "%s unable to listen: %s", __func__, strerror(errno));
goto cleanup;
}
// 有设备接入 ,发送btsnoop的header file format过去
for (;;) {
int client_socket;
OSI_NO_INTR(client_socket = accept(listen_socket_, NULL, NULL));
if (client_socket == -1) {
if (errno == EINVAL || errno == EBADF) {
break;
}
LOG_WARN(LOG_TAG, "%s error accepting socket: %s", __func__, strerror(errno));
continue;
}
/* When a new client connects, we have to send the btsnoop file header. This allows
a decoder to treat the session as a new, valid btsnoop file. */
pthread_mutex_lock(&client_socket_lock_);
safe_close_(&client_socket_);
client_socket_ = client_socket;
OSI_NO_INTR(send(client_socket_, "btsnoop\0\0\0\0\1\0\0\x3\xea", 16, 0));
pthread_mutex_unlock(&client_socket_lock_);
}
cleanup:
safe_close_(&listen_socket_);
return NULL;
}{
if (logfile_fd != INVALID_FD)
close(logfile_fd); //关闭掉btsnoop的文件描述符
logfile_fd = INVALID_FD;
btsnoop_net_close(); // 关闭掉btsnoop_net
}
void btsnoop_net_close() {
#if (!defined(BT_NET_DEBUG) || (BT_NET_DEBUG != TRUE))
return; // Disable using network sockets for security reasons
#endif
if (listen_thread_valid_) {
shutdown(listen_socket_, SHUT_RDWR);
pthread_join(listen_thread_, NULL);
safe_close_(&client_socket_);
listen_thread_valid_ = false;
}
}首先他是通过capture接口来向外开放
static void capture(const BT_HDR *buffer, bool is_received) {
const uint8_t *p = buffer->data buffer->offset;
btsnoop_mem_capture(buffer);
if (logfile_fd == INVALID_FD)
return;
switch (buffer->event & MSG_EVT_MASK) {
case MSG_HC_TO_STACK_HCI_EVT:
btsnoop_write_packet(kEventPacket, p, false);
break;
case MSG_HC_TO_STACK_HCI_ACL:
case MSG_STACK_TO_HC_HCI_ACL:
btsnoop_write_packet(kAclPacket, p, is_received);
break;
case MSG_HC_TO_STACK_HCI_SCO:
case MSG_STACK_TO_HC_HCI_SCO:
btsnoop_write_packet(kScoPacket, p, is_received);
break;
case MSG_STACK_TO_HC_HCI_CMD:
btsnoop_write_packet(kCommandPacket, p, true);
break;
}
}static void btsnoop_write_packet(packet_type_t type, const uint8_t *packet, bool is_received) {
int length_he = 0;
int length;
int flags;
int drops = 0;
switch (type) {
case kCommandPacket:
length_he = packet[2] 4;
flags = 2;
break;
case kAclPacket:
length_he = (packet[3] << 8) packet[2] 5;
flags = is_received;
break;
case kScoPacket:
length_he = packet[2] 4;
flags = is_received;
break;
case kEventPacket:
length_he = packet[1] 3;
flags = 3;
break;
}
uint64_t timestamp = btsnoop_timestamp();
uint32_t time_hi = timestamp >> 32;
uint32_t time_lo = timestamp & 0xFFFFFFFF;
length = htonl(length_he);
flags = htonl(flags);
drops = htonl(drops);
time_hi = htonl(time_hi);
time_lo = htonl(time_lo);
btsnoop_write(&length, 4);
btsnoop_write(&length, 4);
btsnoop_write(&flags, 4);
btsnoop_write(&drops, 4);
btsnoop_write(&time_hi, 4);
btsnoop_write(&time_lo, 4);
btsnoop_write(&type, 1);
btsnoop_write(packet, length_he - 1);
}
static void btsnoop_write(const void *data, size_t length) {
if (logfile_fd != INVALID_FD)
write(logfile_fd, data, length);
btsnoop_net_write(data, length);
}
void btsnoop_net_write(const void *data, size_t length) {
#if (!defined(BT_NET_DEBUG) || (BT_NET_DEBUG != TRUE))
return; // Disable using network sockets for security reasons
#endif
pthread_mutex_lock(&client_socket_lock_);
if (client_socket_ != -1) {
ssize_t ret;
OSI_NO_INTR(ret = send(client_socket_, data, length, 0));
if (ret == -1 && errno == ECONNRESET) {
safe_close_(&client_socket_);
}
}
pthread_mutex_unlock(&client_socket_lock_);
}以上代码我觉得除了格式之外没有什么可讲的,如果你对为什么这么写格式不了解,我还是建议你回头看看。btsnoop的概念,下面我们来说明下调用地方
通过以下函数实现来获取到btsnoop的interface函数操作
const hci_t *hci_layer_get_interface() {
buffer_allocator = buffer_allocator_get_interface();
hal = hci_hal_get_interface();
btsnoop = btsnoop_get_interface(); // 通过这个interface来实现
hci_inject = hci_inject_get_interface();
packet_fragmenter = packet_fragmenter_get_interface();
vendor = vendor_get_interface();
low_power_manager = low_power_manager_get_interface();
init_layer_interface();
return &interface;
}host->controller方向的写入实现,通过这个调用btsnoop->capture(packet, false);
static void transmit_fragment(BT_HDR *packet, bool send_transmit_finished) {
uint16_t event = packet->event & MSG_EVT_MASK;
serial_data_type_t type = event_to_data_type(event);
btsnoop->capture(packet, false);
hal->transmit_data(type, packet->data packet->offset, packet->len);
if (event != MSG_STACK_TO_HC_HCI_CMD && send_transmit_finished)
buffer_allocator->free(packet);
}controller->host方向的写入实现,这个函数比较复杂,你们暂时只需要知道调用了btsnoop->capture(packet, false)写入到btsnoop即可,因为其他实现暂时不在我们本文章套路范围之内
static void hal_says_data_ready(serial_data_type_t type) {
packet_receive_data_t *incoming = &incoming_packets[PACKET_TYPE_TO_INBOUND_INDEX(type)];
uint8_t byte;
while (hal->read_data(type, &byte, 1) != 0) {
switch (incoming->state) {
case BRAND_NEW:
// Initialize and prepare to jump to the preamble reading state
incoming->bytes_remaining = preamble_sizes[PACKET_TYPE_TO_INDEX(type)];
memset(incoming->preamble, 0, PREAMBLE_BUFFER_SIZE);
incoming->index = 0;
incoming->state = PREAMBLE;
// INTENTIONAL FALLTHROUGH
case PREAMBLE:
incoming->preamble[incoming->index] = byte;
incoming->index ;
incoming->bytes_remaining--;
if (incoming->bytes_remaining == 0) {
// For event and sco preambles, the last byte we read is the length
incoming->bytes_remaining = (type == DATA_TYPE_ACL) ? RETRIEVE_ACL_LENGTH(incoming->preamble) : byte;
size_t buffer_size = BT_HDR_SIZE incoming->index incoming->bytes_remaining;
incoming->buffer = (BT_HDR *)buffer_allocator->alloc(buffer_size);
if (!incoming->buffer) {
LOG_ERROR(LOG_TAG, "%s error getting buffer for incoming packet of type %d and size %zd", __func__, type, buffer_size);
// Can't read any more of this current packet, so jump out
incoming->state = incoming->bytes_remaining == 0 ? BRAND_NEW : IGNORE;
break;
}
// Initialize the buffer
incoming->buffer->offset = 0;
incoming->buffer->layer_specific = 0;
incoming->buffer->event = outbound_event_types[PACKET_TYPE_TO_INDEX(type)];
memcpy(incoming->buffer->data, incoming->preamble, incoming->index);
incoming->state = incoming->bytes_remaining > 0 ? BODY : FINISHED;
}
break;
case BODY:
incoming->buffer->data[incoming->index] = byte;
incoming->index ;
incoming->bytes_remaining--;
size_t bytes_read = hal->read_data(type, (incoming->buffer->data incoming->index), incoming->bytes_remaining);
incoming->index = bytes_read;
incoming->bytes_remaining -= bytes_read;
incoming->state = incoming->bytes_remaining == 0 ? FINISHED : incoming->state;
break;
case IGNORE:
incoming->bytes_remaining--;
if (incoming->bytes_remaining == 0) {
incoming->state = BRAND_NEW;
// Don't forget to let the hal know we finished the packet we were ignoring.
// Otherwise we'll get out of sync with hals that embed extra information
// in the uart stream (like H4). #badnewsbears
hal->packet_finished(type);
return;
}
break;
case FINISHED:
LOG_ERROR(LOG_TAG, "%s the state machine should not have been left in the finished state.", __func__);
break;
}
if (incoming->state == FINISHED) {
incoming->buffer->len = incoming->index;
btsnoop->capture(incoming->buffer, true);
if (type != DATA_TYPE_EVENT) {
packet_fragmenter->reassemble_and_dispatch(incoming->buffer);
} else if (!filter_incoming_event(incoming->buffer)) {
// Dispatch the event by event code
uint8_t *stream = incoming->buffer->data;
uint8_t event_code;
STREAM_TO_UINT8(event_code, stream);
data_dispatcher_dispatch(
interface.event_dispatcher,
event_code,
incoming->buffer
);
}
// We don't control the buffer anymore
incoming->buffer = NULL;
incoming->state = BRAND_NEW;
hal->packet_finished(type);
// We return after a packet is finished for two reasons:
// 1. The type of the next packet could be different.
// 2. We don't want to hog cpu time.
return;
}
}
}