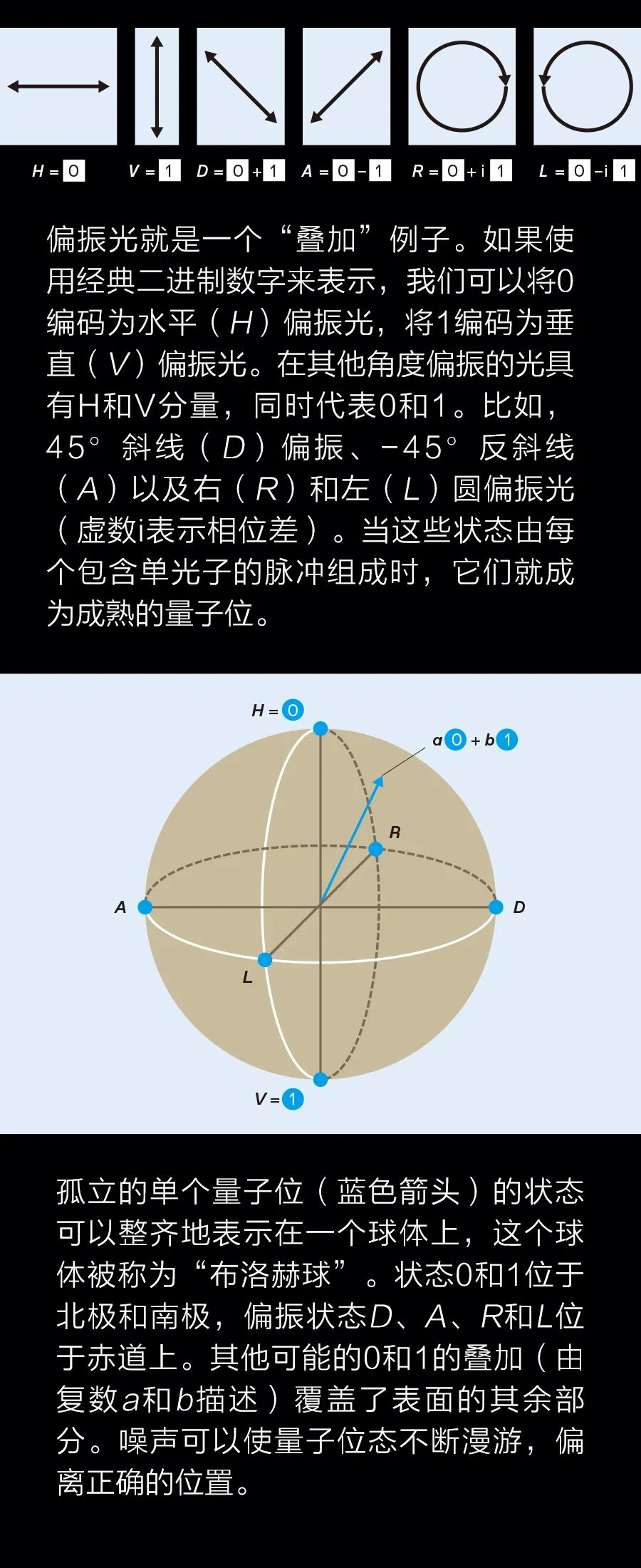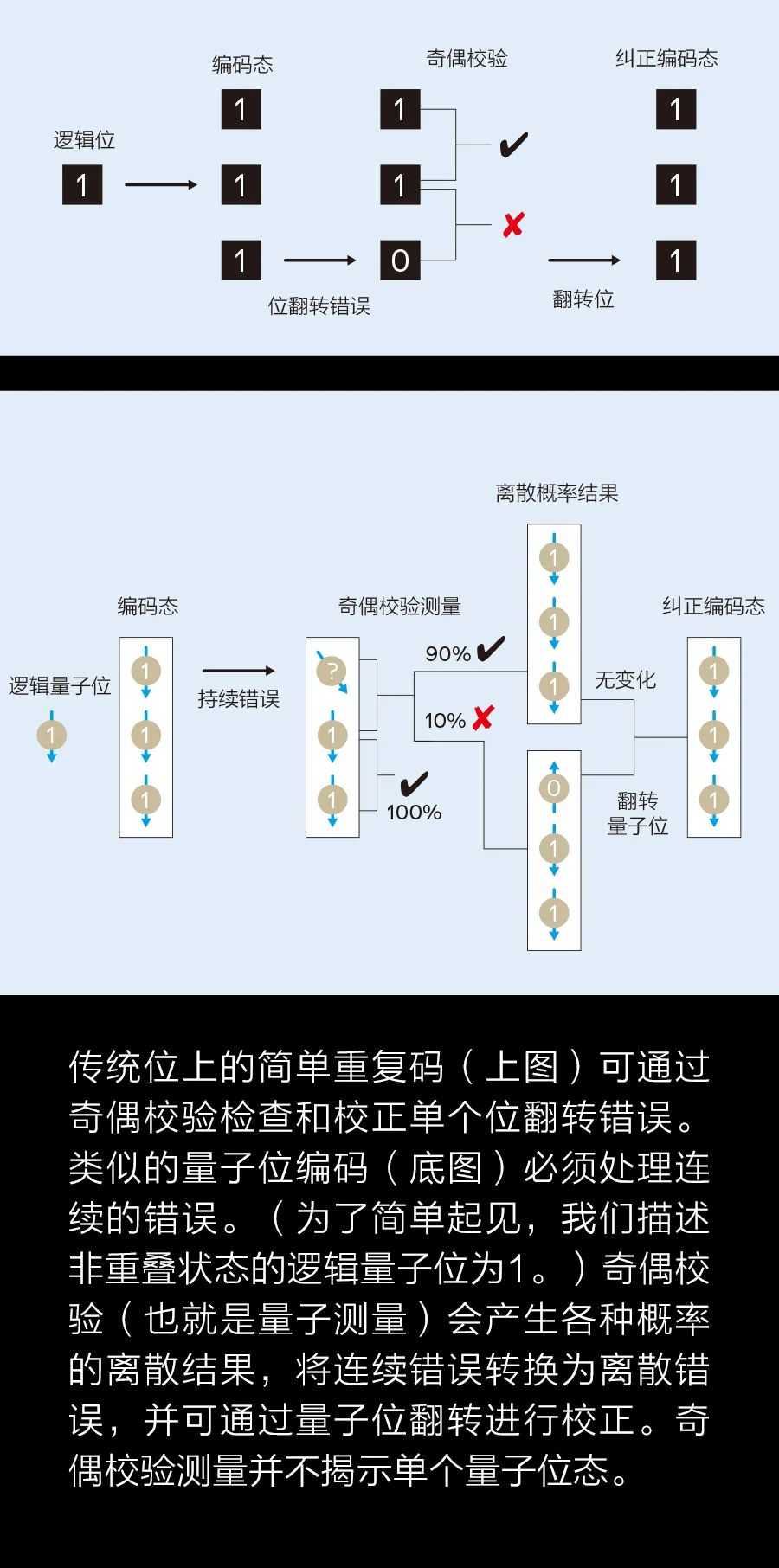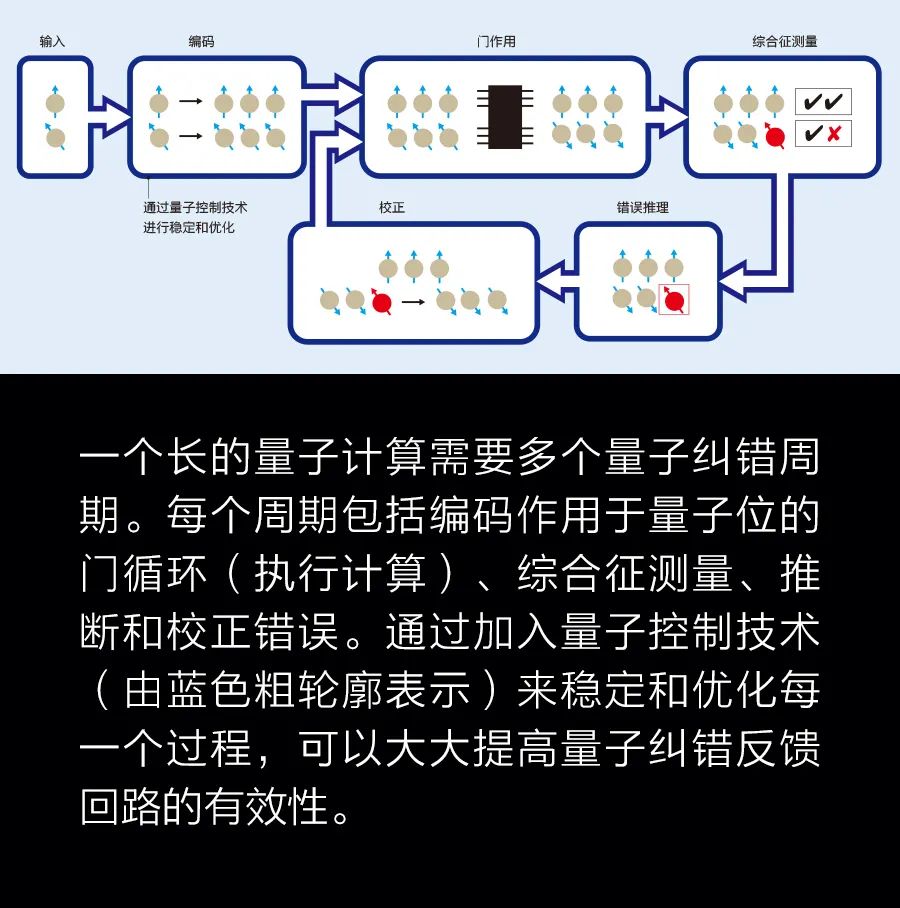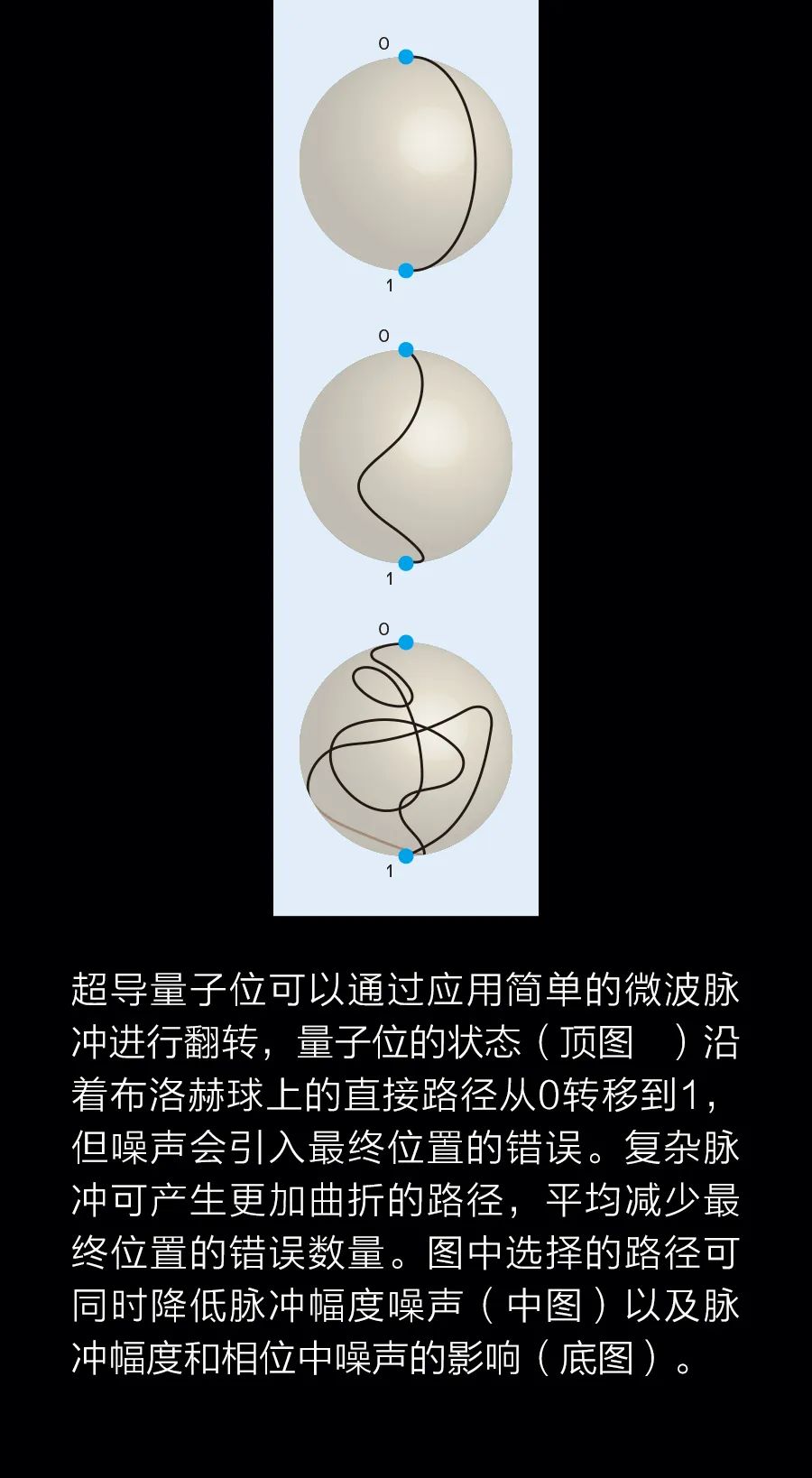
刻在古墓碑上的日期和手机或笔记本电脑中的数据之间的共同点,可能比我们所知的更多。它们都涉及硬件携带的经典信息,相对不易出错。量子计算机内的情形却大不相同:信息本身有其独特的属性,与标准的数字微电子相比,最先进的量子计算机硬件出现错误的可能性要高数十万亿亿倍。这种极高的易错性是阻碍量子计算实现其伟大前景的最大问题。
幸运的是,量子纠错( QEC)方法可以解决这个问题,至少大体上如此。过去25年间建立起的一套成熟的理论体系现在可提供坚实的理论基础,并且实验者已经实现了数十个量子纠错原理论证示例。但这些实验的质量和复杂程度仍然没有达到降低系统总体错误率所需的程度。我们和许多其他从事量子计算的研究人员正试图彻底超越这些量子纠错初步演示,用它构建实用的大规模量子计算机。在介绍如何切实实现这种纠错的设想前,我们需要首先回顾一下量子计算机是如何运行的。著名的IBM研究员罗尔夫•兰道尔(Rolf Landauer)曾说过,信息是物理的。虽然听起来很抽象,但信息总是需要物理表达,这种物理表达很重要。传统的数字信息由不同位数的0和1组成,可以用经典的物质状态来表示,也就是说,这种状态可以用经典物理学描述。相比之下,量子信息涉及量子位,其属性遵循量子力学的特殊规则。一个经典位只有两个可能值:0或1。然而,一个量子位可以是这两种信息状态的叠加,同时具备这两种状态的特征。偏振光就是一个直观的叠加示例。我们可以用水平偏振光来表示0,用垂直偏振光表示1,但光也可以在一定角度上偏振,同时具有水平和垂直分量。事实上,有一种量子位的表示方法就利用了单光子偏振。这些想法可以推广到n位或量子位:n位可以在任何时刻代表2n个可能值中的任何一个,而n量子位可以同时包括所有2n个经典态对应的分量的叠加。这些叠加为量子计算机工作提供了范围极大的可能状态,虽然在如何操作和访问方面存在限制。信息叠加是量子处理采用的核心资源,并与其他量子规则共同提供了一种强大的计算新方法。研究人员正在试验许多不同的物理系统来保存和处理量子信息,包括光、捕获的原子和离子,以及基于半导体或超导体的固态设备。为了实现量子位,所有这些系统均遵循相同的量子物理基本数学规则,全部都对环境波动引入错误高度敏感。相比之下,现代数字电子技术处理经典信息的晶体管可在几十年的时间里以每秒10亿次的速度可靠地执行运算,硬件发生故障的可能性微乎其微。值得关注的是,量子态可以拥有连续的叠加范围。偏振光再次提供了一个很好的比喻:线性偏振角可以取0到180度之间的任一值。我们可以将量子位的状态形象地想象为指向球体表面某个位置的箭头。这个球体被称为“布洛赫球”,其北极和南极分别代表二进制态0和1,其表面的所有其他位置则代表这两种态可能的量子叠加。噪声导致布洛赫箭头随时间在球体周围漂移。经典计算机利用电容器电压等物理量来代表0和1,可以将物理量锁定在正确值附近,抑制不断的徘徊和不必要的位翻转。但没有类似的方法可以将量子位的“箭头”锁定在布洛赫球上的正确位置。20世纪90年代初,兰道尔等人认为,这是制造可用量子计算机的根本障碍。这个问题被称为“可扩展性”:一个简单的量子处理器或许可以利用少数量子位执行一些操作,但能将这项技术扩展到具有许多量子位阵列、可以长时间运行的计算系统吗?一种被称为“模拟计算”的经典计算也使用连续量,并适用于某些任务,但连续出错的问题阻碍了这类系统在复杂性方面的扩展。量子位的连续出错也可能导致量子计算机面临同样的命运。我们现在更清楚了。理论家们已经成功地将传统的数字数据的纠错理论调整到量子环境。量子纠错用一种模拟计算机不能实现的方式,使规模化的量子处理成为可能。为了了解它的工作原理,我们有必要回顾一下在传统数据场景中如何执行纠错。简单的系统就可以处理传统信息中的错误。例如,在19世纪,船舶通常携带时钟来确定它在航行中的经度。一只正常的时钟可以始终跟踪格林威治时间,再结合太阳在天空中的位置,提供必要的数据。时钟计时错误可能会产生危险的导航错误,因此船舶通常至少携带3只时钟。如果一只时钟出现了故障,我们可以发现两只时钟的读数不一致,但要确定哪只时钟出现了故障,我们需要3只时钟,并通过多数票进行纠正。使用多时钟就是重复码的一个例子:信息冗余编码在多台物理设备中,一台设备出现失调可以被发现和纠正。也许你已经知道,处理量子力学错误时会增加一些重要的复杂因素。特别是有两个问题可能会使使用量子重复码的所有希望破灭。第一个问题是,测量从根本上干扰了量子系统。例如,如果把信息编码在3个量子位上,并直接观察它们来检查错误,这可能会毁坏它们。就像打开盒子时的薛定谔的猫一样,它们的量子态将发生不可逆转的变化,破坏计算机原本打算利用的量子特性。第二个问题是量子力学的一个基本结果,被称为“不可克隆定理”,它意味着我们不可能对未知量子态进行完美复制。如果我们知道量子位精确的叠加态,那么产生任何数量的同一状态下的量子位都没有问题。但是,计算正在运行中,且我们无法知道一个量子位将会转变到什么状态时,就无法制造该量子位的真实副本,除非复制整个过程直到那个状态到来。幸运的是,我们可以避开这两个障碍。下面首先介绍如何利用经典的三位重复码的例子来避开测量问题。实际上,我们不需要知道每个编码位的状态来识别哪一位出现了翻转(如果有的话)。相反,我们只需问两个问题:“位1和位2是否相同?”以及“位2和位3是否相同?”这被称为奇偶校验问题,两个相同的位被称为具有偶校验,而两个不相同的位被称为具有奇校验。通过这两个问题的答案,可以确定哪个位发生了翻转,然后将该位反向翻转,以纠正错误。我们甚至不需要确定每个编码位的值,就可以完成这一切。类似的策略可以用来纠正量子系统中的错误。要获得奇偶校验的值仍然需要量子测量,但重要的是,它不会揭示潜在的量子信息。额外的量子位可作为一次性资源,获取奇偶校验值,且不会暴露(也不会干扰)编码信息本身。那么,不可克隆问题怎么办呢?事实证明,可以取一个状态未知的量子位,以一种不克隆原始信息的方式在多个量子位的叠加中对隐藏状态进行编码。通过这个过程,可利用3个物理量子位记录相当于单个逻辑量子位的信息量,并且可以执行奇偶校验和纠正步骤来保护逻辑量子位免受噪声影响。量子错误不仅是只有位翻转错误,这种简单的三量子位重复码不能够防止所有可能出现的量子错误。真正的量子纠错需要更多东西。20世纪90年代中期,彼得•肖尔(Peter Shor,当时在新泽西州默里山的AT&T贝尔实验室就职)描述了一种精美的方案,把重复码嵌入另一个码,将一个逻辑量子位编码为9个物理量子位。肖尔的方案可以防止任何一个物理量子位上发生任意量子错误。从那时起,量子纠错领域开发了许多改进的编码方案,每个逻辑量子位使用更少的物理量子位(最少的使用5个),或者增强其他性能。如今,在量子计算机的大规模纠错提案中,主力是“表面码”,这在20世纪90年代末借用拓扑学和高能物理的奇异数学开发出来的。我们可以很方便地将量子计算机看成由位于物理设备底层基础之上的逻辑量子位和逻辑门组成。这些物理设备容易受到噪声的影响,会产生随时间累积的物理错误。周期性普遍奇偶校验测量(称为“综合征测量”)可以识别物理错误,并在它们给逻辑层造成损害之前进行纠正。量子纠错的量子计算由作用于量子位的门循环、综合征测量、错误推断和校正组成。用工程师更熟悉的术语来说,量子纠错是一种反馈稳定形式,它使用间接测量来获得纠错所需的信息。当然,量子纠错并非万无一失。比如,如果出现一位以上的翻转,三位重复码就会失效。此外,创建编码量子态和执行综合征测量的资源和机制本身也容易出错。那么,当所有这些过程本身都有缺陷时,量子计算机如何执行量子纠错呢?值得注意的是,纠错循环可以设计为容忍每个阶段发生的错误和故障,无论是物理量子位、物理门,还是用于推断的测量中存在错误。这种设计被称为容错架构,在原则上允许错误鲁棒的量子处理,哪怕所有组件都不可靠。即使在容错架构中,额外的复杂性也会引入新的故障途径。因此,只有在基础物理错误率不太高时,才会减少错误对逻辑层的影响。特定容错架构能够可靠处理的最大物理错误率被称为它的“差错平衡阈值”。如果错误率低于该阈值,则量子纠错过程趋向于在整个循环内抑制错误。但是,如果错误率超过该阈值,那么增加的机器只会使整体情况变得更糟。容错量子纠错理论是所有努力制造实用化量子计算机的基础,它为构建任何规模的系统铺平了道路。如果量子纠错在硬件上实现的效果超过某些性能的要求,那么差错的影响就可以降低到任意低的水平,能够执行任意长时间的计算。此时你可能想知道量子纠错是如何规避连续错误这个问题的。这个问题对于扩展模拟计算机有致命影响。答案就在于量子测量的本质。在对叠加进行的典型量子测量中,只产出极少的离散结果是可能得,且为匹配测量结果,物理状态会发生变化。而通过奇偶校验测量,这一变化会有所帮助。假设你有一个由3个物理量子位组成的代码块,其中一个量子位状态已经偏离了它的理想状态(见本文第三张图)。如果执行奇偶校验测量,只可能出现两个结果:通常情况下,测量将报告无错误的奇偶校验状态,测量后无论结果如何,3个量子位都将全部处于正确的状态;少数情况下,测量结果会显示奇数校验状态,这意味着可能出错的量子位现在已完全翻转。如果是这样,我们可以将该量子位翻转回来,恢复所需的编码逻辑状态。换言之,执行量子纠错可以将小的连续错误转换为不常见但离散的错误,类似于数字计算机中出现的错误。研究人员现在已经在实验室演示了量子纠错的许多原理,从重复码基础知识到复杂编码,再到码字的逻辑运算,以及重复的测量和校正循环。当前,量子硬件差错平衡阈值估计为1000次运算中约有1次错误。虽然这种水平尚未在量子纠错方案的所有组成部分中实现,但研究人员已经越来越接近了,达到了多量子位逻辑每1000次运算的错误低于5次。即便如此,越过这一关键里程碑才是故事的开始,而非结束。如果系统的物理差错率仅略低于阈值,量子纠错需要巨大的冗余来大幅降低逻辑差错率。当物理差错率大幅低于阈值时,挑战性就会大大降低。因此,仅仅超过差错阈值是不够的,我们需要大幅度超越它。该如何做到这一点呢?如果退一步,我们可以看到,处理量子计算机差错的挑战也是一个稳定动态系统抵御外部干扰的挑战。虽然量子系统的数学规则不同,但这是控制工程学科中的一个常见问题。正如控制理论可以帮助工程师在机器人即将跌倒时进行自我纠正一样,量子控制工程可以提出一种最佳方法,实现在真实物理硬件上的抽象量子纠错编码。量子控制可以将噪声的影响降到最低,并使量子纠错切实可行。本质上,量子控制涉及优化量子纠错中使用的所有物理过程实现方式,从单逻辑操作到执行测量的方式。例如,在一个基于超导量子位的系统中,通过微波脉冲照射来翻转量子位。一种方法是使用一种简单的脉冲将量子位的状态从布洛赫球的一个极点沿着格林威治子午线精确地移动到另一个极点。如果脉冲因噪声而失真,就会产生错误。事实证明,使用一个更加复杂的脉冲,即沿着一条精心选择的曲径将量子位从极点移动到另一极点,在相同噪声条件下,可以减少量子位最终状态的错误,即使实现的新脉冲不完美。量子控制工程的一个方面包括在指定系统的特殊不完美实例中为这类任务仔细分析和设计最佳脉冲。它是一种开环(无测量)控制形式,也是对量子纠错中使用的闭环反馈控制的补充。这种开环控制还可以改变物理层差错的统计值,以便更好地符合量子纠错的假设条件。例如,量子纠错性能受逻辑块内最坏情况差错的限制,但各个设备可能会有很大差异。减少这种可变性将非常有益。我们团队使用IBM的公共可访问机器进行了一个实验,结果表明,认真优化脉冲可以将一小群量子位中差错的最佳情况和最差情况间的差异减少到原来的1/10甚至更低。有些错误过程只有在执行复杂算法时才会出现。例如,只有当“邻居”被操纵时,量子位上才会发生串扰错误。我们团队已经证明,将量子控制技术嵌入到算法中,可将整体成功率提高几个数量级。这项技术使量子纠错协议更有可能正确识别物理量子位中的错误。25年来,量子纠错研究人员主要关注量子位编码的数学策略和有效检测编码集合中的错误。直到最近,研究人员才开始解决一个棘手的问题:如何以最佳方式在实际硬件中完整实现量子纠错反馈回路。虽然量子纠错技术在许多方面的改进已经成熟,但量子纠错领域也越来越意识到,将量子纠错和控制理论结合起来,可能会发展出一种不同凡响的新方法。无论如何,这种方法将把量子计算变为现实,而且这将是无法改变的现实。作者:Michael J. Biercuk、Thomas M. Stace